КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример: двухзвенный манипулятор
|
|
|
|
Применение уравнений Лагранжа-Эйлера в форме (6-35) – (6-42) для описания динамики движения манипулятора рассмотрим на примере двухзвенного манипулятора с вращательными сочленениями (рис. 6.3).
Все оси сочленений рассматриваемого манипулятора параллельны оси z, перпендикулярной плоскости рисунка. Физические характеристики, такие, как положение центра масс, масса каждого звена и выбранные системы координат, указаны ниже. Требуется получить уравнения движения рассматриваемого двухзвенного манипулятора, основываясь на равенствах (6-35) – (6-42).
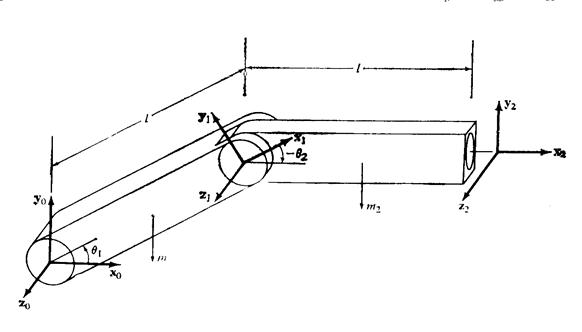
Рисунок 6.3. Двухзвенный манипулятор
Примем:
-присоединенными переменными являются  ;
;
-первое и второе звенья имеют массы  и
и 
-параметры звеньев имеют значения  ;
;  ;
;  .
.
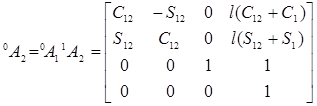
Тогда для матрицы  имеем:
имеем:
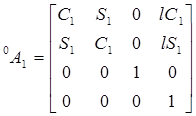 ,
,  ,
,
 ,
,
где 


В соответствии с определением матрицы  для вращательного сочленения имеем:
для вращательного сочленения имеем:
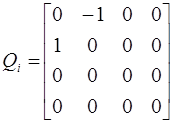 .
.
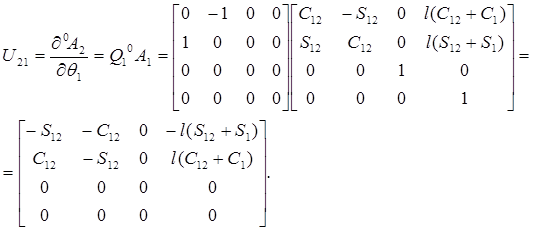
Используя выражение (6-19), получаем:
 .
.
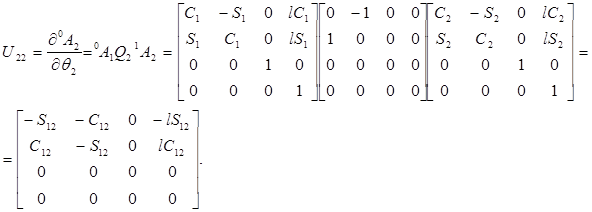
Аналогично для  и
и  получаем:
получаем:
Полагая, что центробежные моменты инерции равны нулю, получим формулу для матрицы псевдоинерции  :
:
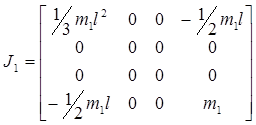 ;
; 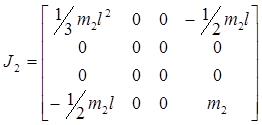 .
.
Для определения слагаемых, описывающих центробежное и кориолисово ускорение, воспользуемся равенством (6-40). Для i =1 оно дает:
 .
.
С помощью (6-41) можно получить значения коэффициентов  . Подставляя их в предыдущее выражение, имеем:
. Подставляя их в предыдущее выражение, имеем:
 .
.
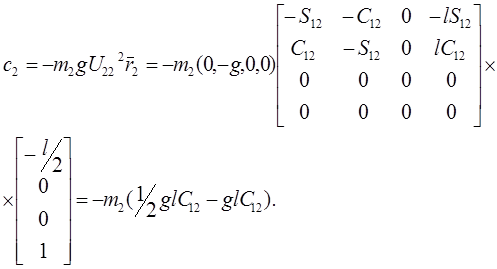
Аналогично для i =2:
 .
.
Таким образом:
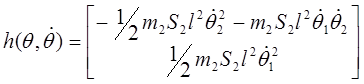 .
.
Слагаемые, определяющие влияние гравитационных сил  :
:
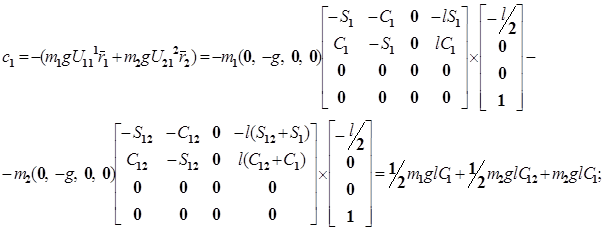
Таким образом, вектор, определяющий влияние силы тяжести:
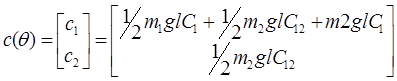 .
.
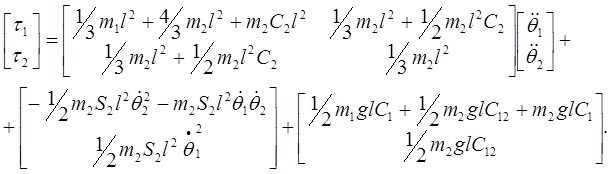
Окончательно имеем уравнения описывающие динамику движения двухзвенного манипулятора:
 ,
,
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 529; Нарушение авторских прав?; Мы поможем в написании вашей работы!