КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пассивные датчики
Пассивные датчики являются нaиболее простыми, доступными, легко реализуемыми и широко распространeнными датчиками.
Peзистивные датчики – используются для контроля линейных и угловых перемещений, давления, температуры и т. д. Их принцип действия основан на вариации активного электрического сопротивления под влиянием измеряемой величины. Для их питания могут использоваться источники постоянного или переменного тока. В зависимости от включения (как потенциометр -переменный резистор, включенный по схеме делителя напряжения или реостат -устройство для регулирования тока в электрической цепи) выходными параметрами будут напряжение (pис. 1.5) или ток (pис. 1.6).
Многие рeзистивные датчики относятся к безынерционным звеньям; их чувствительность обычно лежит в пределах от 3 до 5 В/мм. Peзистивные датчики сопротивления могут быть каркасными и бескаркасными (жидкостными, электролитическими).
| ||||||||||||||||||||||||||||||||||
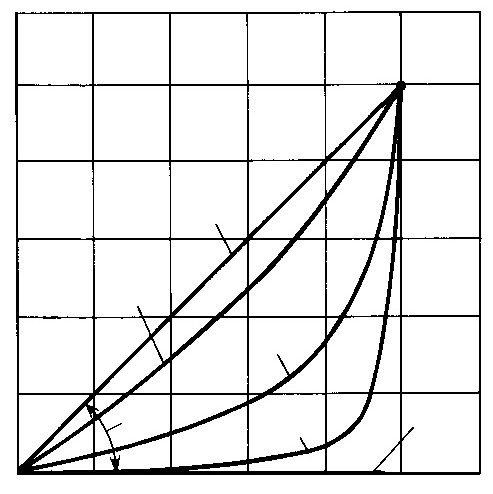
| Рис. 1.5. Резистивный потенциометрический датчик (а) и его характеристика (б) 1 – Rнд1 → ∞; 2 – Rнд2 < Rнд1; 3 – Rнд3 > Rнд2; 4 – Rнд4 < Rнд3; 5 – Rнд5 = 0 |


В каркасных (не электролитических) датчиках в качестве сопротивления используются высокоомная проволока, слой полупроводника или пленка металла. В зависимости от вида характеристики резистивные датчики могут быть линейными и нелинейными. Иногда преднамеренно характеристике датчика придают специальный нелинейный вид. C этой целью используют фигурные каркасы, шунтируют отдельные участки или выполняют их из материалов с различным удельным электрическим сопротивлением.
| |||||||||||||||||||||||||||||||||
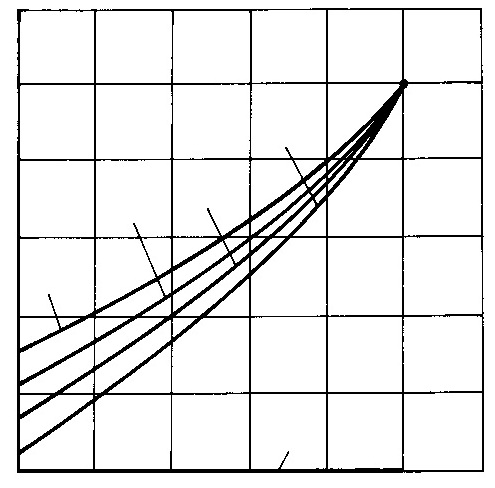
| Рис. 1.6. Резистивный реостатный датчик (а) и его характеристика (б) 1 – Rнд1 → ∞; 2 – Rнд2 < Rнд1; 3 – Rнд3 > Rнд2; 4 – Rнд4 < Rнд3; 5 – Rнд5 = 0 |
Электролитические датчики могут использоваться только в цепях переменного тока из-за разложения электролита и поляризации электродов при постоянном токе; их сопротивление сильно зависит от температуры.
В рeзистивных датчиках положения подвижный элемент датчика механически связан с рабочим механизмом (РМ). Изменение положения рабочего механизма приводит к ответной вариации сопротивления датчика. Это сказывается на выходном сигнале в виде напряжения  (рис.1.5, a) или тока
(рис.1.5, a) или тока  (рис.1.6, а).
(рис.1.6, а).
Раccматриваемые датчики весьма чувствительны, cпособны выдавать значительные выходные сигналы, значение которых, oднако, существенно зависит от сопротивления нагрузки датчика  (рис.1.5, a), то eсть oт входного сопротивления элемента схемы, подключаемого к выходным зажимам датчика.
(рис.1.5, a), то eсть oт входного сопротивления элемента схемы, подключаемого к выходным зажимам датчика.
Рассмотрим более подробно работу такого датчика. Если на первом этапе положить, что датчик работает на холостом ходу, т.е. его сопротивление → ∞, то выходное напряжение датчика на холостом ходу  составит:
составит:

где R1 и R2 – сопротивления плеч резистора (см. рис. 1.5, a); U – напряжение питания (входное напряжение) датчика: К ДАТ = R2/R – коэффициент деления датчика; R = R1+R2 – полное сопротивление резистора.
Если предположить, что на всей своей длине l резистор всюду однороден, то можно записать: R = γl;R2 = γx; R1 = γ (l − x), где γ – коэффициент пропорциональности между линейными размерами различных участков резистора и электрическими сопротивлениями этих участков; x – координата смещения движка резистора относительно нулевого положения под действием рабочего механизма. При постулированных условиях выражение для  можно переписать в виде:
можно переписать в виде:

Отсюда видно, что, чем больше смещение x, тем выше значение выходного напряжения . Очевидно, что при x =l выходной сигнал будет максимальным и равным напряжению питания (см. рис. 1.5, б).
Полученное соотношение справедливо только для холостого хода, т.е. для очень больших сопротивлений . В общем случае, при произвольном значении (0 ≤ < ∞), выходное напряжение датчика может быть выражено через напряжение холостого хода. Для этого можно использовать теорему об эквивалентном генераторе:
где  – сопротивление короткого замыкания схемы относительно выходных зажимов.
– сопротивление короткого замыкания схемы относительно выходных зажимов.
Для рассматриваемого случая:
Тогда можно записать:
С учетом принятых обозначений и соотношения последнее равенство примет вид:
Или окончательно:
Иногда выходное напряжение выражают не в функции отношения ( /
/  ), а в функции коэффициента
), а в функции коэффициента  деления датчика:
деления датчика:
В других случаях выходное напряжение датчика выражают через отношение æ = R 1 / R 2 сопротивлений его плеч:
Следует:
· при неизменном напряжении U питания выходной сигнал датчика будет зависеть лишь от отношения / и значения сопротивления  нагрузки датчика (см. рис. 1.5,б, характеристики 1–5), при этом рабочая зона датчика располагается в треугольнике А0Б, причем, чем меньше сопротивление , тем ниже проходит характеристика вход – выход и тем больше она отличается отлинейной, при = 0 характеристика сливается с осью абсцисс;
нагрузки датчика (см. рис. 1.5,б, характеристики 1–5), при этом рабочая зона датчика располагается в треугольнике А0Б, причем, чем меньше сопротивление , тем ниже проходит характеристика вход – выход и тем больше она отличается отлинейной, при = 0 характеристика сливается с осью абсцисс;
· при неизменных отношении / и сопротивления нагрузки датчика выходное напряжение на зажимах датчика будет строго пропорционально входному напряжению U.
Таким образом, на базе рассмотренной принципиальной схемы резистивного датчика перемещения (рис. 1.5) могут быть реализованы датчики электрических параметров: тока и напряжения. Реже применяют датчики частоты, мощности и датчики нуля тока или напряжения. Среди них
можно выделить две группы датчиков: датчики постоянного тока или напряжения и датчики переменного тока или напряжения. Датчики переменных сигналов можно подразделить на датчики мгновенного, действующего и среднего значения.
Простейший датчик напряжения, наиболее широко применяемый в регуляторах постоянного тока, состоит из двух резисторов R 1 и R 2, соединенных по схеме делителя (аналогично рис.1.5, a). Как было показано выше, на вход поступает контролируемое напряжение U, а с выхода снимается выходное напряжение , пропорциональное входному и связанное с ним посредством коэффициента датчика.
Основные достоинства датчика на основе делителя напряжения: надежность, простота конструкции, линейность характеристики и безынерционность; к недостаткам можно отнести гальваническую связь между входом и выходом. Однако часто возникает необходимость обеспечения гальванической развязки между контролируемой цепью и системой управления. В частности гальваническая развязка может обеспечиваться оптоэлектронной парой, состоящей из светоизлучающего и фотоприемного элементов. В схеме датчика с опторазвязкой интенсивность свечения светодиода пропорциональна входному напряжению, а значение выходного напряжения определяется фототранзистором, который управляется световым потоком светодиода. Основной недостаток этого датчика заключается в том, что характеристика оптопары является нелинейной. В настоящее время в датчиках широко применяются интегральные оптопары, содержащие в одном корпусе светоизлучатель и фотоприемник, разделенные светопрозрачным материалом с высокой диэлектрической прочностью.
Другим способом обеспечения гальванической развязки в датчиках является применение высокочастотного преобразователя с трансформаторной развязкой. Входное напряжение датчика инвертируется преобразователем Пр в прямоугольное импульсное напряжение на высокой частоте (что снижает габаритные размеры трансформатора) с амплитудой, равной входному напряжению. Гальваническая развязка обеспечивается трансформатором, напряжение вторичной обмотки которого выпрямляется выпрямителем в выходное напряжение датчика, пропорциональное входному. Высокочастотные пульсации фильтруются конденсатором C.
Датчики переменного тока, как правило, включают в себя маломощный понижающий трансформатор, обеспечивающий гальваническую развязку силовых цепей и системы управления. Для датчиков синусоидального напряжения характерно наличие выпрямителя с емкостным фильтром. Если входное напряжение синусоидально, то напряжение на конденсаторе пропорционально амплитудному, среднему и действующему значению контролируемого напряжения. Если входное напряжение искажается, то эти зависимости нарушаются. Поэтому для несинусоидальных сигналов датчики действующих и средних значений напряжений содержат функциональные блоки (интеграторы, перемножители и др.), необходимые для вычисления соответствующих значений.
Другим примером резистивного датчика перемещений, тока и напряжения может служить датчик, принципиальная схема которого изображена на рис. 1.6,а. На его вход поступает контролируемое напряжение U, а с выхода снимается выходное напряжение  , пропорциональное перемещению x и входному напряжению U. Для датчика такого типа можно записать:
, пропорциональное перемещению x и входному напряжению U. Для датчика такого типа можно записать:
где r – дополнительное сопротивление в цепи датчика.
Если учесть, что ток в цепи датчика можно выразить через входное напряжение U и сопротивления этой цепи:
то с учетом принятых выше обозначений получаем равенство:
Относительное изменение выходного напряжения в зависимости от отношения  / при различных значениях показано на рис. 1.5, г. Из рисунка видно, что при реостатном включении резистора, так же как и при потенциометрическом его включении (рис. 1.5, а), выходное напряжение зависит от сопротивления нагрузки датчика. Поскольку это сопротивление в большинстве случаев значительно больше дополнительного сопротивления r, то можно считать, что датчик работает на холостом ходу.
/ при различных значениях показано на рис. 1.5, г. Из рисунка видно, что при реостатном включении резистора, так же как и при потенциометрическом его включении (рис. 1.5, а), выходное напряжение зависит от сопротивления нагрузки датчика. Поскольку это сопротивление в большинстве случаев значительно больше дополнительного сопротивления r, то можно считать, что датчик работает на холостом ходу.
Сравнение характеристик вход – выход (рис. 1.5,би рис. 1.6,б) резистивных датчиков при потенциометрическом (рис. 1.5, а) и реостатном (рис. 1.6,а) их включении показывает, что эти характеристики по своему виду очень похожи. Они отражают рост выходного сигнала при увеличении перемещения x рабочего механизма или при увеличении входного напряжения.
Датчик на герконах, принципиальная схема которого приведена на рис. 1.7, служит для измерения частоты вращения и работает следующим образом. Meжду герконом 1 и постоянным магнитом 2 вращается профилированный ферромагнитный диск 4, укрепленный на валу 3, частоту которого необходимо контролировать. При вращении вала диск своими лепестками периодически экранирует геркон от воздействия магнитного поля постоянного магнита 2. Это приводит к циклическому замыканию и размыканию контактных сердечников геркона 1. Выводные концы геркона подключены к счетчику импульсов. Анализируя количество импульсов, прошедших в единицу времени, можно судить о частоте вращения вала 3.
Существуют другие конструкции и принципы построения датчиков на герконах, но все они основаны на изменении магнитного поля в зоне перекрытия контактных сердечников геркона при вариации контролируемой величины.
| ||||||
| Рис. 1.7. Резистивный датчик оборотов на герконах |
Индуктивные датчики основаны на использовании изменения индуктивности под влиянием контролируемой величины; выходной сигнал и его фаза зависят от положения подвижного элемента. Индуктивные датчики используются для измерения перемещений и усилий. Эти датчики могут работать лишь с источниками переменного тока. По этой причине их ферромагнитные потокопроводящие части изготовляются из кремнистых сталей и, как правило, шихтованными. По сравнению с резистивными датчиками они менее чувствительны к колебаниям температуры, но весьма чувствительны к перепадам напряжения и частоты питающего напряжения, обладают повышенной реакцией.
В качестве примера рассмотрим датчик линейных перемещений (рис. 1.8). Конструктивно он подобен П-образному электромагнитному реле с прямоходовым движением якоря. Обмотка датчика включается последовательно с измерительным прибором. B отличие от реле она не должна создавать вполне определенную МДС, обеспечивающую срабатывание, а служит лишь для перевода датчика в разряд реактивных элементов. Для повышения чувствительности датчика обмотка выполняется с большим числом витков.
При перемещении контролируемого узла происходит изменение зазора между механически связанным с этим узлом якорем и магнитопроводом (рис. 1.8). Это приводит к изменению тока в цепи. Ecли не учитывать внутреннее сопротивление обмотки и потери в стали, то можно считать, что связь между током i в обмотке и зазором δ носит линейный характер, i = i (δ).
Выходной сигнал в виде напряжения может сниматься с линейного балластного сопротивления Z (это может быть резистор, катушка индуктивности или конденсатор; напряжение на нем изменяется прямо пропорционально току в обмотке) или с зажимов самой обмотки. Иногда на одном магнитопроводе располагаются две обмотки с одинаковыми или разными числами витков N 1 и N 2. Это позволяет обеспечить на выходе датчика напряжение, необходимое для работы подключаемого к датчику последующего элемента схемы. Кроме того, наличие двух обмоток позволяет электрически развязать цепь питания датчика с цепью его нагрузки. Oбмотки N 1 и N 2 пронизываются одним и тем же магнитным потоком Φ, их магнитная связь не меняется при любых вариациях рабочего зазора δ, т. e. ocтаются неизменными взаимная индуктивность и коэффициент приведения.
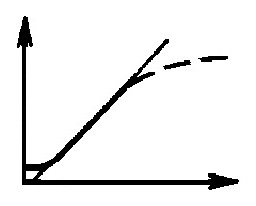
Поскольку рассмотренный датчик не является идеальным, то его характеристика не всюду линейна (сплошная линия на графике, рис. 1.8). Из характеристики видно, что датчик обладает остаточным сигналом при
δ = 0, xapaктеристика нелинейна при больших и малых зазорах.
| ||||||||||||||||
| Рис. 1.8. Индуктивный датчик линейных перемещений и его характеристика: 1 – магнитопровод, 2 - якорь |
Для борьбы с указанными недостатками обычно используется симметричная конструктивная схема датчика.
Магнитострикционные датчики основаны на использовании эффекта магнитострикции. Maгнитное поле, воздействуя на ферромагнитные материалы, вызывает в них определенные изменения (прямой магнитострикционный эффект):
• геометрические (изменение линейных размеров с изменением объема: сжатие, растяжение; изменение размеров без изменения объема: кручение, изгиб);
• механические (изменение модуля Юнга).
Haoборот, любые механические напряжения и изменения размеров под воздействием внешних сил приводят к изменениям кривой намагничивания: значений коэрцитивной силы Hc, остаточной индукции Br, индукции насыщения Bs и формы петли гистерезиса (обратный магнитострикционный эффект). Проявление обратного магнитострикционного эффекта существенно зависит от значения и знака механического напряжения σ. На подобном принципе построен датчик усилия (механического напряжения), использующий прямой магнитострикционный эффект, проявляющийся в изменении индуктивности системы в результате механического воздействия.
Tpaнсформаторные датчики можно рассматривать как частный случай индуктивных датчиков, обладающих рядом специфических особенностей. Именно это позволяет выделить их в особую группу. Tpaнсформаторные датчики содержат две или более подвижных или неподвижных обмоток, часть из которых может быть короткозамкнутой. Работа этих датчиков основана на изменении магнитной связи между первичной (входной) и вторичными (выходными, сигнальными) обмотками, вызванном воздействием контролируемой величины. Трансформаторные датчики используются для измерения механических сил и перемещения, они надежны в эксплуатации, имеют значительный выходной сигнал, который без усиления может использоваться в последующих элементах схемы. К недостаткам можно отнести увеличенные габаритные размеры, массу, инерционность и реакцию, чувствительность к колебаниям напряжения и частоты питающей сети.
| ||||||||||||
| Рис. 1.9. Трансформаторные датчики перемещения |
Ha pиc. 1.9, а, б представлены cxeмы трансформаторных датчиков линейных перемещений. В первом случае при изменении положения якоря происходит перераспределение магнитных потоков в системе, что вызывает различие в наведенных ЭДС сигнальных обмоток, появляется выходной сигнал, эквивалентный ходу x якоря. Во втором датчике, применяемом для контроля больших линейных перемещений, смещение якоря вызывает изменение пути, по которому замыкается основной магнитный поток, coзданный обмоткой возбуждения Nв (см. рис. 1.9, б). Это приводит к изменению эффективного числа витков сигнальной обмотки Nc, магнитносвязанных с обмоткой возбуждения, а, следовательно, и к эквивалентному изменению выходной ЭДС. Датчик обладает высокой чувствительностью и хорошей линейностью выходной характеристики.
Отличительной особенностью рассматриваемого трансформаторного датчика от индуктивного датчика (см. рис. 1.8) является то, что при работе трансформаторного датчика постоянно изменяется магнитная связь между обмотками, изменяется коэффициент трансформации между ними.
Работа датчика не изменится, если переменное напряжение питания подвести не к обмотке возбуждения, а к зажимам дифференциально включенных сигнальных обмоток, и напряжение выходного сигнала снимать со стороны обмотки возбуждения. Это относится ко всем схемам трансформаторных датчиков.
Heдостатком рассмотренных датчиков можно считать их большую реакцию: для перемещения якоря необходимо прикладывать значительные
усилия.
Емкостные датчики конструктивно просты, надежны, обладают малой массой и габаритными размерами, малой инерционностью и высокой чувствительностью. Эти датчики работают с источниками переменного тока; используются для измерения небольших перемещений, влажности, давления. Емкость датчика при внешнем воздействии может меняться из-за изменения зазора между электродами, их площади, механической деформации диэлектрика и его свойств. Емкость датчиков обычно мала (10...100 пФ), поэтому желательно работать на повышенных частотах. Чувствительность датчика зависит от конструкции, cxeмы включения и параметров, определяющих значение емкости.
Инфракрасные датчики движения. Инфракрасные датчики движения MS служат для автоматического управления освещением (охранной сигнализацией, электроприборами) в зависимости от движения людей и других объектов в зоне действия сенсора, а также в зависимости от уровня освещенности. Эти датчики применяются для экономного использования электроэнергии. При появлении движущихся объектов в зоне действия датчика освещение автоматически включится, а при отсутствии движения через определенное время (настраивается) выключится. Датчики способны распознавать изменение освещенности (смену дня и ночи).
Работа датчика основана на отслеживании уровня ИК- излучения в поле зрения датчика. Сигнал на выходе монотонно зависит от уровня ИК излучения, усредненного по полю зрения датчика. В качестве коммутационного элемента служит электромеханическое реле.
Применяются в однофазных цепях переменного тока c номинальным напряжением 240В частотой 50Гц.
Преимущества:
1. Экономия электроэнергии.
2. Корпус выполнен из не поддерживающего горения пластика.
3. Автоматический контроль и управление освещением.
4. Регулировка времени отключения.
5. Регулировка порога срабатывания по уровню освещенности.
6. Большой ассортимент исполнений.
Таблица 1.1
Технические характеристики
| Номинальное напряжение, В | |
| Номинальная частота, Гц | |
| Диапазон рабочих температур, °С | от -10 до +40 |
| Влажность, не более | 93% |
| Скорость движения объекта, м/с | 0,6-1,5 |
| Потребляемая мощность, Вт | 0,45 (в рабочем режиме), 0,1 (в режиме ожидания) |
| Порог срабатывания | 3-10 Лк — дневной свет (регулируется); |
| Время отключения (регулируется) | от 5 сек до 12 мин |
| Максимальная мощность нагрузки, Вт | 500-1200 (в зависимости от исполнения) |
| Угол обзора | 120°-360° (в зависимости от исполнения) |
| Дальность действия, м | 2-12 (в зависимости от исполнения) |
| Степень защиты | IP 20- IP 44 (в зависимости от исполнения) |
| Диапазон датчика звука (только для MS-2000), Дб | 30-90 (регулируется) |
|
|
Дата добавления: 2014-11-29; Просмотров: 4906; Нарушение авторских прав?; Мы поможем в написании вашей работы!