КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Методи зняття координат, що використовуються в АСУ
|
|
|
|
Навчальні питання та розподілення часу
Заняття № 2: Методи зняття координат цілей.
Обговорено на засіданні кафедри
ПРОТОКОЛ № 1
“ 29 ” серпня 2014 р
ХАРКІВ – 2014 р
Навчальний потік – 337
Час – 90 хвилин.
Місце –клас
Навчальні та виховні цілі:
-ознайомити студентів з методами зняття координат, що
використовуються в АСУ;
-довесті до студентів структурні схеми і головні характеристики
пристроїв зняття даних в АСУ;
-виховувати у студентів почуття відповідальності за вивчення дисципліни,
любов до своєї військової професії та до Батьковщини взагалі.
Вступ 5 хв.
1. Методи зняття координат, що використовуються в АСУ 40хв. 2. Структурні схеми і головні характеристики
пристроїв зняття даних в АСУ 40хв.
Заключення 5 хв.
Навчально-матеріальне забезпечення:
1. Діапозитиви 1-3
2. Крейда, дошка.
Навчальна література:
1.АСУ войск ПВО СВ. Часть 1.Основы построения автоматизированных систем управления: Учебник. – К.: ВА ПВО СВ, 1989.
2.АСУ войск ПВО СВ. Часть 1. Основы построения автоматизированных систем управления. Альбом рисунков. – К.: ВА ПВО СВ, 1989.
3.Азаренков В.В.,Сорокин В.П.,Степанов Г.А.Автоматизированные системы управления войсковой ПВО.Обработка информации в автоматизированных системах управления войсковой ПВО.Конспект лекций.Киев:изд.ВА ПВО,1985г.
ВВЕДЕНИЕ
В настоящее время все задачи, решаемые в АСУ, условно делят на задачи управления войсками и задачи управления боевыми средствами. К первой группе относятся задачи, возникающие, как правило, на этапе планирования боевых действий соединения, частей и подразделений войсковой ПВО:
1.Прогнозирование масштаба и характера боевых действий средств воздушного нападения противника.
2.Прогнозирование радиоэлектронной, радиационной и химической обстановки.
3.Оценка потенциальных возможностей группировки войск ПВО
4.Планирование перемещения частей и подразделений,учет их состояния.
5.Планирование технического обеспечения.
6.Оценка позиций радиоэлектронных средств и др.
Во вторую группу включают задачи, которые решаются в ходе отражени. налета воздушного противника. Примерами этих аадач могут служить сбор и обработка данных о воздушной обстановке, выработка решений и передача целеуказаний средствами ПВО и т.д.В данной лекции изучаються задачи только второй группы.
Первичная обработка радиолокационной информации производится на радиолокационных станциях или объектах АСУ и состоит в выделении из суммарного сигнала, полученного на выходе приемника, полезного (отраженного от цели) сигнала. Факт обнаружения этого сигнала обычно связывают с обнаружением цели. Одновременно в устройстве, осуществляющем первичную обработку, производится нумерация целей, определяются, кодируются, записываются в память ЭВМ или подготавливаются для передачи на другие устройства координаты обнаруженной цели.
Первичная обработка может производиться ручным, автоматизированным или автоматическим способами.
При ручном способе, применяемом в планшетной схеме управления средствами ПВО, обнаружение и определение координат цели производит оператор РЛС. Естественно, что никакие вычисления он не выполняет. Действия оператора определяются результатами визуальной оценки изображения на экране и эвристическими критериями. Так, цель обнаруживается по яркости отметки относительно фона. Координаты цели оцениваются по взаимному положению ее отметки и линий (меток) азимута и дальности. Считанные оператором координаты передаются по каналам связи на пункты приема.
При автоматизированном способе съема координат целей используется схема, показанная на рис. 2.1.
Генератор развертки формирует импульсы пилообразной формы  ,
,  , помощью которых на индикаторе обстановки создается радиалъно-круговая развертка. Сигнал с выхода приемника РЛС поступает в канал подсвета индикатора и на экране возникает изображение. При съеме координат целей используется перемещаемая оператором по экрану светящаяся точка, называемая маркером. Линейное отклонение щупа механизма съема координат от кулевого положения
, помощью которых на индикаторе обстановки создается радиалъно-круговая развертка. Сигнал с выхода приемника РЛС поступает в канал подсвета индикатора и на экране возникает изображение. При съеме координат целей используется перемещаемая оператором по экрану светящаяся точка, называемая маркером. Линейное отклонение щупа механизма съема координат от кулевого положения  с помощью редуктора и кулис преобразуется в углы поворота
с помощью редуктора и кулис преобразуется в углы поворота  и
и  , а последние -в пропорциональные им двоичные коды Хм и Ум. После преобразования кодов в напряжения возникает возможность высвечивания не индикаторе положения маркера.
, а последние -в пропорциональные им двоичные коды Хм и Ум. После преобразования кодов в напряжения возникает возможность высвечивания не индикаторе положения маркера.
Обнаружив цель, оператор совмещает маркер с серединой переднего фронта отметки и нажимает кнопку СЪЕМ. Координаты маркера, равные в этот момент координатам цели, вводится в ЭВМ. Вычислительная машина реализует алгоритмы вторичной обработки информации. По данным нескольких обзоров РЛС она рассчитывает составляющие скорости и текущие координаты цели, которые затем выдаются на индикатор обстановки.
В зависимости от того, отображаются или не отображаются на экране индикатора текущие координаты целей оператор АСУ работает в од«ом из двух режимов:
максимальной производительности,
по отклонению.
В режиме максимальной производительности оператор вынужден работать в тех случаях, когда он не видит результатов машинной обработки измеренных им координат целей. Снимая с максимальной частотой данные о целях, он обеспечивает более качественное решение задач управления на пунктах, осуществляющих прием данных о воздушной обстановке.
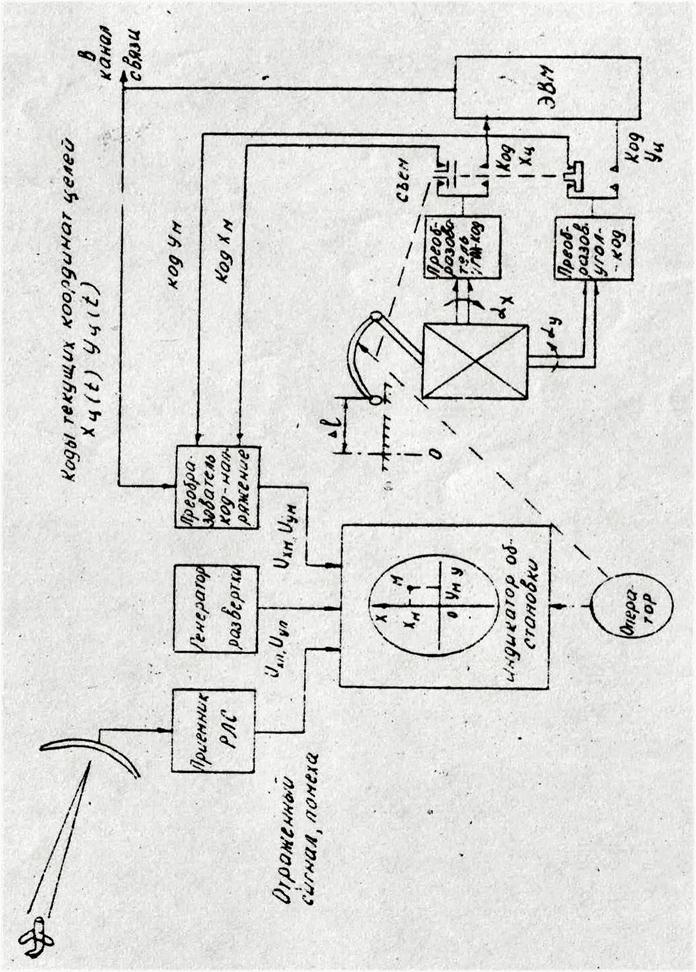 Рис. 2.1 Структурная схема автоматизированного способа съема координат целей.
Рис. 2.1 Структурная схема автоматизированного способа съема координат целей.
В режиме работы по отклонению оператор постоянно оценивает взаимное расположение на экране двух отметок: рассчитанного машиной текущего и измеренного РЛС фактического положение цели. Обнаружив рассогласование, оператор производит измерение координат и ввод их в ЭВМ. Во втором режиме точность сопровождения целей обычно несколько выше и улучшаются условия работы оператора.
При автоматическом способе в АСУ используется специальная цифро-аналоговая аппаратура. Сущность процессов преобразования информации поясняет рис.2.2 и 2.3.
Обработка радиолокационных сигналов начинается с их дискретизации. Процесс дискретизации разбивается на два этапа: квантование по времени и квантование по уровню. С введением временного квантования развертка дальности РЛС разбивается на элементарные участки размером
 ,
,
а общее числе таких участков равно

где  - период импульсов квантования;
- период импульсов квантования;
с- скорость распространения электромагнитного излучения в атмосфере Земли;
 - максимальная дальность обнаружения РЛС.
- максимальная дальность обнаружения РЛС.
При выборе периода квантования учитывают ряд соображений.
Во-первых, необходимо обеспечить минимальную вероятность пропуска полезного сигнала. Для этого величина не должна превышать эффективной длительности отраженного импульса.
Во-вторых, необходимо сохранить разрешающую способность РЛС. Следовательно, период не должен превышать длительности зондирующего импульса.
В-третьих, должна достигаться максимальная точность оценка дальности до цели квантованным данным. Всем этим требованиям удовлетворяет , выбранная из условия  , где
, где  - интервал корреляции сигнала U (t), получаемого с выхода приемника РЛС.
- интервал корреляции сигнала U (t), получаемого с выхода приемника РЛС.
Квантование по уровню состоит из сравнения входного сигнала U  с пороговым уровнем
с пороговым уровнем  . Если имеет место U
. Если имеет место U  , то квантователь выдает импульсы стандартной амплитуды и длительности, означающей логическую единицу. Если U
, то квантователь выдает импульсы стандартной амплитуды и длительности, означающей логическую единицу. Если U  то импульс в очередном временном интервале длительностью отсутствует (логический 0). В принципе в схеме квантователя могут использоваться и несколько уровней квантования, однако многоуровневые устройства широкого применения не нашли. В связи с тем что квантователи выдают только два вида выходных сигналов, они получили название бинарных или двоичных. Двоично – квантовые сигналы поступают в запоминающее устройство ЦВМ и на индикатор обстановки.
то импульс в очередном временном интервале длительностью отсутствует (логический 0). В принципе в схеме квантователя могут использоваться и несколько уровней квантования, однако многоуровневые устройства широкого применения не нашли. В связи с тем что квантователи выдают только два вида выходных сигналов, они получили название бинарных или двоичных. Двоично – квантовые сигналы поступают в запоминающее устройство ЦВМ и на индикатор обстановки.
При вращении антенны с периодом Т0 и одновременной посылке зондирующих импульсов с периодом Tп зона обзора РЛС разбивается на элементарные участки по азимуту (рис. 2.3). Угловой размер элементарного участка по азимуту
 .
.
Общее число таких участков
 .
.
Следовательно, при временном квантовании общее количество элементарных ячеек, на которую разбивается зона обзора РЛС, равно

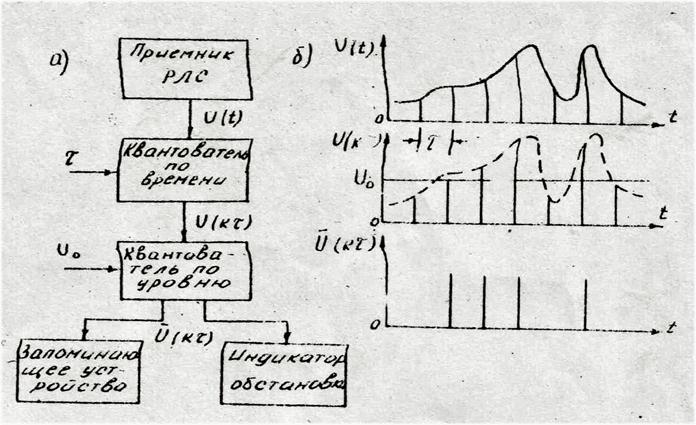
Рис.2.2. Двоичное квантование радиолокационных сигналов: а) Структурная схема; б) Временные диаграммы.
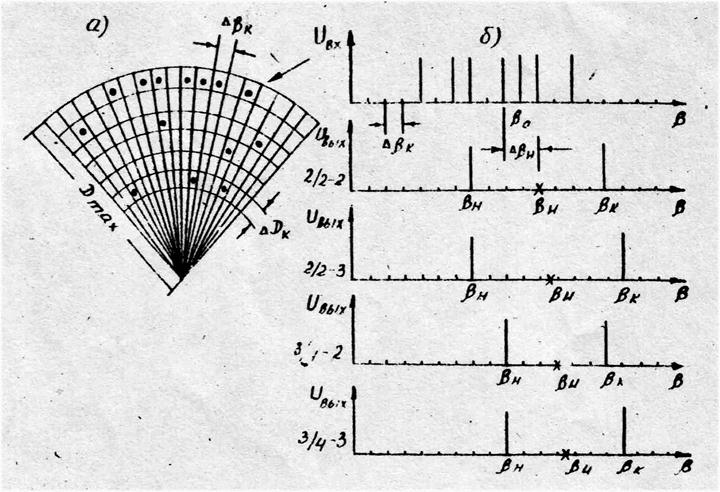
Рис.2.3.Обнаружение пачки двоично-квантованных сигналов: а) Участок зоны обзора РЛС; б) Временные диаграммы фиксации границ пачки.
Каждый из них в результате двоичного квантования амплитуд сигналов ставится в соответствие "I" или "О". Объем цифровых данных, подлежащих обработке в каждом обзоре станции, оказывается очень большим. Первоначально все данные запоминаются в оперативной памяти ЦВМ и отображаются на индикаторе обстановке. В дальнейшем они последовательно обрабатываются для каждого отдельно взятого кольца дальности. Обработка состоит в обнаружении пачки отраженных от цели двоично-квантовых сигналов и установлении ее границ  и
и  (начало и конец) рис.2.3..
(начало и конец) рис.2.3..
В настоящее время основными способами обнаружения и фиксации границ пачки являются программные способы. Сущность их заключается в последовательном анализе двоичных сигналов, относящихся к выбранному кольцу дальности, и проверке условий обнаружения начала и конца пачки. В качестве критерия начала пачки часто принимают появление некоторой совокупности из К единиц на заранее зафиксированном количестве позиций l: “k из l (при  )”. Типовыми критериями являются "2 из 2" и "3 из 4 при обязательной второй". Здесь "2 из 2" означает, что начало пачки, фиксируется в том случае, если на двух смежных позициях содержатся две единицы. Критерии типа “К из l ”иногда называются программами (или логиками) начала пачки.
)”. Типовыми критериями являются "2 из 2" и "3 из 4 при обязательной второй". Здесь "2 из 2" означает, что начало пачки, фиксируется в том случае, если на двух смежных позициях содержатся две единицы. Критерии типа “К из l ”иногда называются программами (или логиками) начала пачки.
В качестве критерия конца пачки принимают наличие серии из I, 2, 3..... S нулей подряд. Обнаружители, в которых для фиксации начала пачки используют программу “К из l ”,а для фиксации конца пачки - программу "S нулей подряд", называют программными обнаружителями типа  .
.
На рис.2.3 приведены временные диаграммы работы различных обнаружителей. Как видно, с увеличением l и S возрастает систематическая ошибка намерения азимута
 .
.
В то же время при уменьшении l и S увеличивается вероятность обнаружения ложных целей и “расщепления” больших пачек на несколько малых.
Автоматическая обработка данных по описанным критериям может производиться аппаратными или программными средствами. Измеренные координаты цели, то есть D и  , передаются с РЛС по каналам телекодовой связи на автоматизированные командные пункты для последующей обработки. Если первичная обработка информации производится в АСУ, то координаты D и записываются в специальные области памяти ЭВМ.
, передаются с РЛС по каналам телекодовой связи на автоматизированные командные пункты для последующей обработки. Если первичная обработка информации производится в АСУ, то координаты D и записываются в специальные области памяти ЭВМ.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 515; Нарушение авторских прав?; Мы поможем в написании вашей работы!