КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Регулирование скорости вращения двигателя изменением напряжения на якоре с помощью импульсных регуляторов напряжения
Система генератор-двигатель (Г-Д)
Первоначально для питания двигателей использовался электромашинный управляемый преобразователь (система «генератор-двигатель») (рис. 4.13) [1; 2; 14].
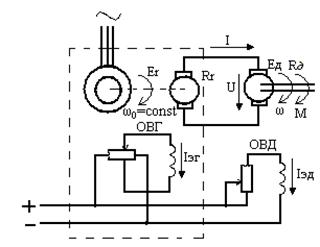
Рис. 4.13. Схема системы «генератор-двигатель».
В пунктир заключён электромашинный преобразователь, включающий в себя гонный асинхронный двигатель и генератор постоянного тока. Такой преобразователь позволяет в широком диапазоне изменять напряжение  на двигателе, изменяя ток возбуждения генератора (ОВГ). Очевидно, что в данном случае напряжение на выходе преобразователя определяется ЭДС генератора. Данная система позволяет обеспечить все возможные режимы работы двигателя. Механические характеристики двигателя (рис. 4.14) располагаются во всех 4 квадрантах. Основной режим работы двигателя в такой системе – это работа с постоянным магнитным потоком, то есть
на двигателе, изменяя ток возбуждения генератора (ОВГ). Очевидно, что в данном случае напряжение на выходе преобразователя определяется ЭДС генератора. Данная система позволяет обеспечить все возможные режимы работы двигателя. Механические характеристики двигателя (рис. 4.14) располагаются во всех 4 квадрантах. Основной режим работы двигателя в такой системе – это работа с постоянным магнитным потоком, то есть  . Мы можем записать уравнения электромеханической и механической характеристик двигателя, полагая, что
. Мы можем записать уравнения электромеханической и механической характеристик двигателя, полагая, что  :
:
 ; (4.15)
; (4.15)
 , (4.16)
, (4.16)
где  - магнитный поток двигателя;
- магнитный поток двигателя;
R я – сопротивление якоря двигателя;
R г – сопротивление якоря генератора.
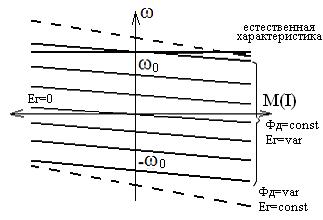
Рис. 4.14. Механические характеристики двигателя в системе Г-Д
Как видим, механические характеристики представляют параллельные прямые, наклон которых несколько больше, чем у естественной характеристики двигателя (жесткость меньше) при Ф=const. Мы наблюдаем их во всех четырёх квадрантах, т.е. двигатель может работать во всех возможных режимах. Реверс двигателя осуществляется за счет изменения полярности тока в обмотке возбуждения генератора (ОВГ).
Данная система позволяет осуществить двухзонное регулирование:
1 зона – за счет изменения напряжения (ЭДС генератора);
2 зона – за счёт изменения магнитного потока двигателя при
номинальном напряжении (характеристики показаны пунктиром
рис 4.14).
Достоинством данной системы являются плавность регулирования, широкий диапазон регулирования, возможность получения линейных непрерывных характеристик во всём диапазоне регулирования и получение всех возможных режимов работы двигателя.
К недостаткам данной системы можно отнести: утроенную установленную мощность машин, низкий КПД, большую инерционность.
4.7.2. Система «тиристорный преобразователь – двигатель (ТП-Д)»
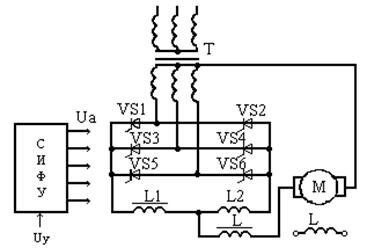
Основным типом преобразователей, применяемых в настоящее время для управления ДПТ, является тиристорный преобразователь, то есть статический полупроводниковый преобразователь. Эти преобразователи представляют управляемые реверсивные или нереверсивные, однофазные или трёхфазные выпрямители, собранные по мостовой или нулевой схеме [2; 5; 14]. Определённые перспективы развития тиристорных преобразователей связаны с использованием в них транзисторов, которые в настоящее время применяются в основном для импульсного регулирования напряжения.
Рассмотрим характеристики привода на примере использования в нем простейшего нереверсивного статического преобразователя.
|
|
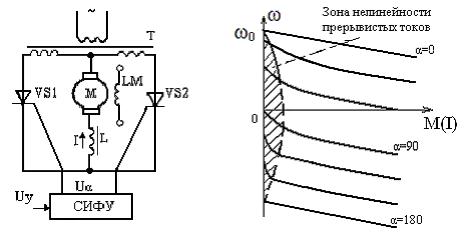
Преобразователь включает в себя в общем случае согласующий трансформатор Т, два тиристора VS1 и VS2, сглаживающий дроссель L и систему импульсно-фазового управления (СИФУ). Преобразователь обеспечивает регулирование напряжения на Д за счёт изменения среднего значения ЭДС преобразователя. Это достигается регулированием с помощью СИФУ угла управления  тиристорами (угол представляет собой угол задержки открытия тиристоров относительно момента, когда напряжение на анодах становится положительным). Зависимость среднего значения ЭДС от угла для многофазного преобразователя:
тиристорами (угол представляет собой угол задержки открытия тиристоров относительно момента, когда напряжение на анодах становится положительным). Зависимость среднего значения ЭДС от угла для многофазного преобразователя:
 , (4.17)
, (4.17)
где  - число фаз преобразователя;
- число фаз преобразователя;
 - амплитудное значение ЭДС преобразователя;
- амплитудное значение ЭДС преобразователя;
 - ЭДС преобразователя при
- ЭДС преобразователя при  .
.
В связи с пульсирующим характером ЭДС на выходе преобразователя ток в цепи Д также пульсирует. Такой характер тока оказывает вредное влияние на работу Д: ухудшаются условия коммутации, возникают дополнительные потери на нагрев. Для уменьшения пульсаций тока в цепь якоря Д включают сглаживающий дроссель. Габариты преобразователя и его вес определяются размерами дросселя и трансформатора. Уравнения электромеханической и механической характеристик имеют вид:
 , (4.18)
, (4.18)
 . (4.19)
. (4.19)
Здесь:
 - эквивалентное сопротивление преобразователя;
- эквивалентное сопротивление преобразователя;
- число фаз преобразователя;
 и
и  - приведённые ко вторичной обмотке трансформатора индуктивное сопротивление рассеянья и активное сопротивление обмотки трансформатора;
- приведённые ко вторичной обмотке трансформатора индуктивное сопротивление рассеянья и активное сопротивление обмотки трансформатора;
 - активное сопротивление обмотки дросселя L.
- активное сопротивление обмотки дросселя L.
Особенностью характеристик Д при питании его от управляемого выпрямителя является наличие зоны прерывистых токов, в пределах которой характеристики нелинейны. Жесткость характеристик в этой зоне резко изменяется. Вследствие односторонней проводимости преобразователя характеристики располагаются в первом и четвёртом квадранте. Меньшим углам соответствует большая ЭДС и большая частота вращения. При  ЭДС преобразователя равна нулю и мы имеем режим динамического торможения.
ЭДС преобразователя равна нулю и мы имеем режим динамического торможения.
Для получения характеристик Д во всех четырёх квадрантах используются реверсивные управляемые выпрямители, которые обычно составляют из двух нереверсивных. Работу во всех четырёх квадрантах можно также обеспечить и при использовании нереверсивных преобразователей, за счет изменения направления тока в обмотке возбуждения Д. В реверсивных преобразователях используют два основных принципа управления: совместное и раздельное.
|
|
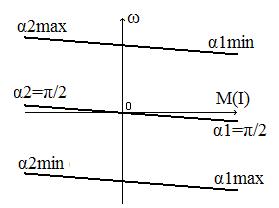
Рис. 4.17, б. Механические характеристики двигателя в системе ТП-Д с реверсивным управляемым выпрямителем
При совместном управлении в работе участвуют все вентили (тиристоры). При этом от СИФУ импульсы управления, подаваемые на катодный комплект (VS1,VS3,VS5), и импульсы, подаваемые на анодный комплект (VS2,VS4,VS6), сдвинуты на угол, близкий к  . Один комплект работает в выпрямительном режиме и проводит ток, а другой в инверторном режиме и ток не проводит. При этом между средними значениями ЭДС выпрямителя и инвертора устанавливается соотношение:
. Один комплект работает в выпрямительном режиме и проводит ток, а другой в инверторном режиме и ток не проводит. При этом между средними значениями ЭДС выпрямителя и инвертора устанавливается соотношение:
 ,
,
но за счёт разности мгновенных значений ЭДС между комплектами вентилей протекают токи, называемые уравнительными. Для их ограничения в схеме предусмотрены реакторы  и
и  . Вид механических характеристик Д зависит от способа согласования углов управления двумя комплектами вентилей. При линейном согласовании сумма углов выпрямителя
. Вид механических характеристик Д зависит от способа согласования углов управления двумя комплектами вентилей. При линейном согласовании сумма углов выпрямителя  и инвертора
и инвертора  поддерживается равной (то есть
поддерживается равной (то есть  ). При этом механические характеристики линейны во всех четырёх квадрантах и практически соответствуют характеристикам в системе Г-Д.
). При этом механические характеристики линейны во всех четырёх квадрантах и практически соответствуют характеристикам в системе Г-Д.
В ряде случаев для уменьшения уравнительных токов используют нелинейное согласование, при котором сумма углов управления и несколько отличается от . В этом случае уравнительные токи уменьшаются, но при переходе Д из двигательного в генераторный режим имеет место заметное увеличение скорости, то есть характеристики двигателя становятся нелинейными, поэтому этот способ согласования применяется редко.
Раздельное управление используется для полного исключения уравнительных токов. Сущность его состоит в том, что импульсы управления подаются только на один комплект вентилей, который в данный момент времени проводит ток. На второй комплект импульсы не подаются, и он закрыт. Управление преобразователем в этом случае осуществляется с помощью специального логического устройства. Это устройство осуществляет контроль за током преобразователя, обеспечивает в функции входного сигнала включение и выключение комплектов вентилей с небольшой паузой в 5-10 мс. В результате при переходе из одного режима работы в другой вблизи оси скорости наблюдается режим прерывистых токов, что приводит к нелинейности характеристик.
На сегодняшний день система ТП-Д получила наибольшее распространение из-за следующих достоинств:
1. Плавность и значительный диапазон регулирования скорости.
2. Высокая жесткость механических характеристик.
3. Высокий КПД электропривода (КПД преобразователя определяют КПД трансформатора 0,93-0,98 и КПД выпрямителя 0,9-0,92).
4. Малая инерционность, высокое быстродействие.
5. Бесшумность в работе, простота в обслуживании и эксплуатации.
Но наряду с этим существуют и следующие недостатки:
1. Односторонняя проводимость преобразователя.
2. Для получения характеристик во всех четырёх квадрантах необходимость использования двухкомплектного реверсивного преобразователя.
3. Напряжение на якоре двигателя имеет пульсирующий характер, что ухудшает его работу.
4. Необходимость сглаживания пульсаций приводит к применению сложных многофазных систем выпрямления и достаточно дорогих и тяжелых дросселей.
5. Работа управляемого выпрямителя характеризуется режимом прерывистых токов, что приводит к нелинейности характеристик.
6. С ростом диапазона регулирования скорости снижается коэффициент мощности (cosφ ≈ cosα; cosφ = cos(α + γ/2), где γ – угол коммутации).
7. Вентильный преобразователь вносит искажение в форму тока и напряжения источника питания.
8. Тиристорные преобразователи имеют невысокую помехозащищенность и малую перегрузочную способность.
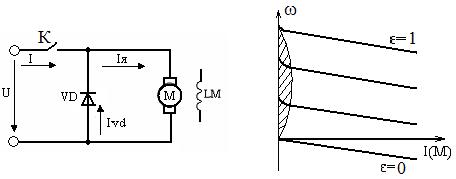
Регулирование напряжения на якоре можно осуществить импульсным методом, периодически подключая двигатель к источнику питания и отключая его. В период отключения двигатель продолжает работать за счёт запасенных кинетической и электромагнитной энергий (рис. 4.18) [1; 2; 14].
|
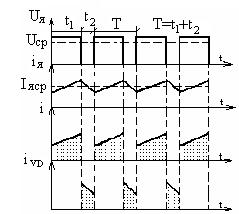
Рис. 4.19. Графики изменения напряжения и токов
Очевидно, что при подаче напряжения на двигатель ток замыкается по цепи якоря через источник (рис. 4.18, а). Параллельно якорю включается диод VD, который обеспечивает протекание тока по якорю в течение паузы. Ток протекает за счет ЭДС самоиндукции якоря, которая возникает при размыкании цепи. Кроме того, диод помогает избежать перенапряжения на якоре и существенно облегчает режимы коммутации ключа  . За счет того, что ток по цепи якоря протекает непрерывно, существенно уменьшаются пульсации тока якоря (рис. 4.19).
. За счет того, что ток по цепи якоря протекает непрерывно, существенно уменьшаются пульсации тока якоря (рис. 4.19).
Из всех видов импульсного регулирования обычно для управления Д используют широтно-импульсное. Оно характеризуется скважностью импульсов:
 .
.
При этом частота импульсов остаётся постоянной. Среднее напряжение на якоре можем определить так:
 .
.
В результате уравнение механической характеристики запишется следующим образом:
 . (4.20)
. (4.20)
Из этого выражения видно, что характеристики линейны и параллельны друг другу, а среднюю скорость можно легко регулировать, изменяя скважность импульсов. При этом жесткость достаточно высокая и соответственно высокая стабильность регулирования (рис. 4.18, б).
Недостатком этого метода является то, что при слишком большой паузе ток может уменьшиться до нуля и возникнет режим прерывистых токов, что приводит к нелинейности механических характеристик в заштрихованной области. В этом случае жесткость механических характеристик резко падает. Единственным способом борьбы с этим явлением является повышение частоты коммутации ключа . Она составляет 800-1200 Гц. Увеличению ее препятствует рост потерь в ключе и динамические параметры ключа.
Обычно для реализации этого способа используются тиристорные или транзисторные ключи. При включении Д по схеме представленной на рисунке (4.18, а), он может работать только в первом квадранте ( - режим динамического торможения). Реверсирование Д возможно лишь за счет обмотки возбуждения. В настоящее время разработан ряд схем, позволяющих при импульсном регулировании напряжения обеспечить работу Д во всех четырех квадрантах, осуществлять реверсирование за счет изменения тока в цепи якоря. Этот способ получил широкое распространение в связи с его простотой, малой инерционностью привода. Широкое распространение получил этот метод в маломощных приводах, особенно при использовании автономных источников постоянного тока (аккумуляторов).
- режим динамического торможения). Реверсирование Д возможно лишь за счет обмотки возбуждения. В настоящее время разработан ряд схем, позволяющих при импульсном регулировании напряжения обеспечить работу Д во всех четырех квадрантах, осуществлять реверсирование за счет изменения тока в цепи якоря. Этот способ получил широкое распространение в связи с его простотой, малой инерционностью привода. Широкое распространение получил этот метод в маломощных приводах, особенно при использовании автономных источников постоянного тока (аккумуляторов).
|
|
Дата добавления: 2014-11-29; Просмотров: 1085; Нарушение авторских прав?; Мы поможем в написании вашей работы!