КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Изменением сопротивления в цепи якоря
|
|
|
|
Регулирование частоты вращения двигателей
Этот способ регулирования отличается универсальностью и простотой реализации. Применяется, когда не требуется высокого качества регулирования [9; 14]. Диапазон регулирования небольшой:  . В зависимости от характера изменения добавочного сопротивления, включенного в цепь якоря (рис. 4.1), регулирование может быть плавное, может быть ступенчатое (ступенчатое чаще). Регулирование осуществляется вниз от номинальной скорости. С увеличением добавочного резистора жесткость характеристик снижается (рис. 4.4). При этом все характеристики выходят из одной точки
. В зависимости от характера изменения добавочного сопротивления, включенного в цепь якоря (рис. 4.1), регулирование может быть плавное, может быть ступенчатое (ступенчатое чаще). Регулирование осуществляется вниз от номинальной скорости. С увеличением добавочного резистора жесткость характеристик снижается (рис. 4.4). При этом все характеристики выходят из одной точки  .
.
Оценим допустимую нагрузку
 (4.6)
(4.6)
 - относительный перепад скорости (статизм).
- относительный перепад скорости (статизм).
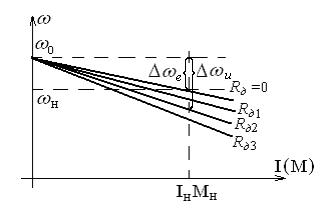
Рис. 4.4. Семейство механических характеристик ДПТ НВ:
Rд =0 – естественная и Rд n – искусственные характеристики
Значение  , приблизительно соответствует D=2, в этом случае потери двигателя:
, приблизительно соответствует D=2, в этом случае потери двигателя:  - следовательно, КПД приблизительно равен 50%, то есть регулирование не экономичное, большие потери в якорной цепи. Этот способ используется в приводах небольшой мощности. Учитывая, что магнитный поток двигателя постоянный, момент, развиваемый двигателем на регулировочных характеристиках, равен номинальному. Следовательно, допустимая нагрузка на двигателе при работе на искусственных характеристиках равна номинальной
- следовательно, КПД приблизительно равен 50%, то есть регулирование не экономичное, большие потери в якорной цепи. Этот способ используется в приводах небольшой мощности. Учитывая, что магнитный поток двигателя постоянный, момент, развиваемый двигателем на регулировочных характеристиках, равен номинальному. Следовательно, допустимая нагрузка на двигателе при работе на искусственных характеристиках равна номинальной  .
.
Способ регулирования частоты вращения ЭП, который характеризуется равенством,  получил название регулирование при «постоянном моменте».
получил название регулирование при «постоянном моменте».
На практике чаще всего резистор Rд секционирован, и при помощи контактора в процессе изменения скорости шунтируются ступени этого добавочного резистора в цепи якоря.
В приводах небольшой мощности используется импульсное регулирование скорости. Суть этого способа (рис. 4.5): шунтирование Rд ключом К, замыкаемого с определенной частотой.
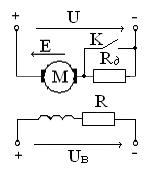
Рис. 4.5. Схема включения ДПТ НВ.
Соотношение длительностей замкнутого t1 и разомкнутого t2 состояния ключа (рис. 4.6) характеризуют относительной величиной ε – называемой скважностью управляющих импульсов.
 ,
,
где  - время замкнутого состояния ключа,
- время замкнутого состояния ключа,
 - время разомкнутого состояния ключа
- время разомкнутого состояния ключа
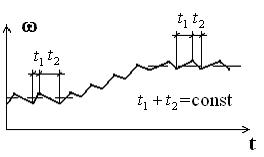
Рис. 4.6. Изменение скорости привода при изменении 
Очевидно, что с увеличением при неизменной нагрузке на валу угловая скорость двигателя будет расти.
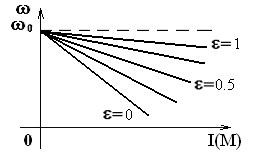
Рис. 4.7. Механические характеристики привода при
импульсном регулировании скорости
При =1 двигатель работает на естественной характеристике (рис. 4.7) (ключ К - замкнут). При =0 двигатель работает на реостатной характеристике соответствующей Rд (ключ К - разомкнут).
 , (4.7)
, (4.7)
 . (4.8)
. (4.8)
Учитывая, что скорость двигателя зависит от нагрузки и величины  в цепи якоря, мы можем изменять среднюю скорость двигателя, поддерживая её постоянной при колебаниях нагрузки или изменяя по определенному закону. В результате мы получаем возможность управления приводом, аналогичную рассмотренной ранее при тех же механических характеристиках. Только на искусственных характеристиках указывают скважность, которая соответствует Rдэ (рис. 4.7). Как видим из выражения (4.8), характеристики линейны. Такой способ применяется в приводах небольшой мощности.
в цепи якоря, мы можем изменять среднюю скорость двигателя, поддерживая её постоянной при колебаниях нагрузки или изменяя по определенному закону. В результате мы получаем возможность управления приводом, аналогичную рассмотренной ранее при тех же механических характеристиках. Только на искусственных характеристиках указывают скважность, которая соответствует Rдэ (рис. 4.7). Как видим из выражения (4.8), характеристики линейны. Такой способ применяется в приводах небольшой мощности.
4.4. Расчёт регулировочных резисторов в цепи якоря двигателя
Расчёт ведут на основе известной механической характеристики двигателя и его паспортных данных. При этом используется метод пропорций или метод отрезков. Обратимся к нарисованному нами семейству механических характеристик двигателя при изменении сопротивлений в цепи якоря (рис. 4.4). При условии, что характеристики линейны, попытаемся определить величину  , необходимого для получения искусственной характеристики [9].
, необходимого для получения искусственной характеристики [9].
Очевидно, что:
 ,
,
 , (4.9)
, (4.9)
где  - сопротивление якоря, соответствующее естественной характеристике.
- сопротивление якоря, соответствующее естественной характеристике.
Необходимо в данном случае знать сопротивление якоря. Его можно найти в каталоге, либо непосредственным измерением. Если же ни то ни другое невозможно, для определения сопротивления  используем приближенную формулу. Сопротивление якоря находят из предположения, что половина всех потерь в двигателе приходится на долю якоря.
используем приближенную формулу. Сопротивление якоря находят из предположения, что половина всех потерь в двигателе приходится на долю якоря.
 , (4.10)
, (4.10)
где  - условное сопротивление, которое нужно включить в якорную цепь, чтобы при неподвижном якоре получить номинальный ток.
- условное сопротивление, которое нужно включить в якорную цепь, чтобы при неподвижном якоре получить номинальный ток.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1267; Нарушение авторских прав?; Мы поможем в написании вашей работы!