КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Схемы включения и статические характеристики двигателя
|
|
|
|
Электропривод с двигателями постоянного тока независимого возбуждения
Двигатели постоянного тока независимого возбуждения (ДПТ НВ) нашли широкое применение в системах регулируемого ЭП различных машин в связи с возможностью плавного регулирования скорости в широком диапазоне и при линейных механических характеристиках.
Основная схема включения ДПТ НВ приведена на рис. 4.1 [1; 9; 10; 14].

Рис. 4.1. Схема включения ДПТ НВ
В этой схеме: U – напряжение питания якоря;
Uв – напряжение питания обмотки возбуждения;
I – ток якоря;
Iв – ток возбуждения;
Rя= Rобмя + Rдп+ Rко + Rщк, сопротивление якорной цепи двигателя;
Rобмя – сопротивление обмотки якоря;
Rдп– сопротивление добавочных полюсов;
Rко– сопротивление компенсационной обмотки;
Rщк– сопротивление щеточного контакта;
Rд – добавочное сопротивление;
Rв – сопротивление обмотки возбуждения;
Rр – регулировочный резистор в цепи возбуждения;
E – ЭДС якоря.
Для упрощения будем считать, что момент на валу двигателя равен электромагнитному моменту (пренебрегаем механическими потерями) и пренебрегаем реакцией якоря.
ЭД описываются тремя основными уравнениями, определяющими работу двигателя:
 , (4.1)
, (4.1)
 , (4.2)
, (4.2)
 , (4.3)
, (4.3)
где  ,
,
 - магнитный поток в Веберах;
- магнитный поток в Веберах;
 - подводимое напряжение к якорю, В;
- подводимое напряжение к якорю, В;
 - конструктивный коэффициент двигателя,
- конструктивный коэффициент двигателя,
где p – число пар полюсов;
N – число активных проводников обмотки якоря;
a – число параллельных ветвей обмотки якоря.

На практике используется электромеханическая характеристика двигателя, показывающая зависимость частоты вращения от тока якоря. Из уравнений (4.1) и (4.2) получим
 . (4.4)
. (4.4)
Используя уравнение (4.3), получим механическую характеристику двигателя:
 . (4.5)
. (4.5)
При постоянном магнитном потоке Ф =const механические и электромеханические характеристики отличаются лишь масштабом по оси абсцисс (рис. 4.2) и представляют собой семейство параллельных прямых.
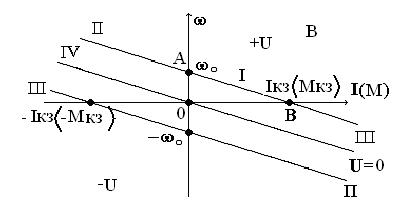
Рис. 4.2. Механические характеристики ДПТ НВ:
А – точка холостого хода  , I=0, M=0;
, I=0, M=0;
B – точка короткого замыкания  , I=Iкз, M=Мкз
, I=Iкз, M=Мкз
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1126; Нарушение авторских прав?; Мы поможем в написании вашей работы!