КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принципы управления пуском и торможением в резисторных электроприводах
|
|
|
|
Принципы управления электроприводом
На практике широко применяются регулируемые ЭП, которые позволяют обеспечивать сложные режимы движения РМ, кроме того, при работе самого двигателя возникают режимы (пуска, торможения, реверса), требующие ограничения координат ЭП (токов, моментов и др.).
Возможны два способа регулирования координат ЭП:
1. Параметрический (за счет изменения параметров двигателя или его цепей);
2. Способ регулирования, применяемый в замкнутых системах ЭП, где статические и динамические характеристики ЭП определяются характером и видом обратных связей.
Рассмотрим параметрический способ регулирования на примере резисторных приводов, в которых процессы регулирования сводятся обычно к изменению сопротивлений якорной (роторной) цепи двигателя.
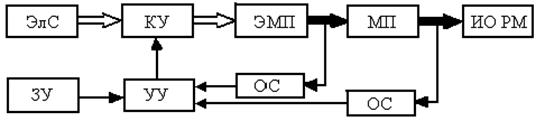
Рис. 3.1. Функциональная схема электропривода:
ЭлС – электрическая сеть;
КУ – коммутационное устройство;
ЭМП – электромеханический преобразователь (двигатель);
МП – механический преобразователь (редуктор);
ИО РМ – исполнительный орган рабочей машины;
ЗУ – задающее устройство;
УУ – устройство управления;
ОС – обратная связь
В таких приводах напряжение сети, как правило, остается неизменным и с помощью коммутирующего устройства по сигналу УУ ЭД подключается к электрической сети.
В приводах обычно используется контактная и бесконтактная аппаратура релейного действия. Большое место среди этих приводов занимают ЭП без регулирования скорости. Учитывая большие пусковые токи и моменты ЭД в таких ЭП, приходится управлять процессами пуска и торможения, накладывая ограничения на пусковой ток и пусковой момент. В таких системах, как правило, используют параметрические способы управления координатами ЭП. В зависимости от способа управления различают управление двигателем в функции времени (с контролем времени), в функции скорости (с контролем скорости), в функции тока (с контролем тока), в функции пути (с контролем пути). Последний способ нашел широкое применение в робототехнических устройствах и широко встречается на практике под названием «позиционирование».
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 992; Нарушение авторских прав?; Мы поможем в написании вашей работы!