КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Звено 3
|
|
|
|
 ;
;
 ;
;
 .
.
Звено 2
 ;
;
 ;
;
 .
.
Звено 1
 ;
;
 ;
;
 .
.
где  ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 и
и  - суммарные моменты сил трения, действующие на звенья 2 и 1.
- суммарные моменты сил трения, действующие на звенья 2 и 1.
Вертикальное расположение КПМ
На рис.4.7 представлены схемы КПМ с вертикальным положением направляющей ползуна 3 для двух признаков сборки механизма ( и
и  ).
).
Ось Х направлена вертикально вверх и совпадает с направляющей ползуна. Ось У составляет с осью Х правую систему координат.
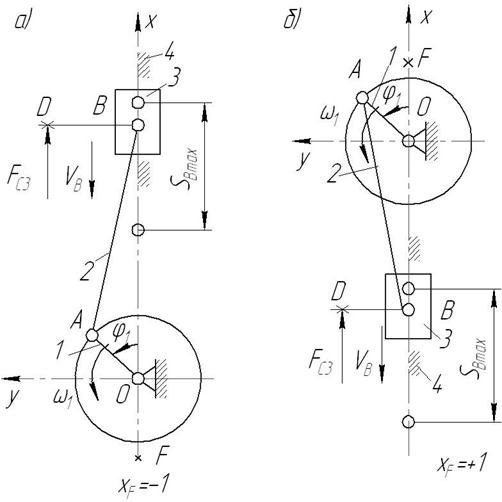
Рис.4.7. Схема КПМ с вертикальными направляющими ползуна
В точке D приложена сила сопротивления  . Координаты т. D следующие:
. Координаты т. D следующие:
 ;
;  .
.
Рабочий ход ползуна для двух схем механизма соответствует углу поворота кривошипа от  до
до  (
( ). При этом сила сопротивления на звене 3 изменяется по закону, представленному на рис. 4.8 (закон справедлив только для КПМ с вертикальной направляющей ползуна).
). При этом сила сопротивления на звене 3 изменяется по закону, представленному на рис. 4.8 (закон справедлив только для КПМ с вертикальной направляющей ползуна).
Здесь  - максимальное значение силы сопротивления;
- максимальное значение силы сопротивления;  - ход ползуна, а =0,1 ; в =0,1 .
- ход ползуна, а =0,1 ; в =0,1 .
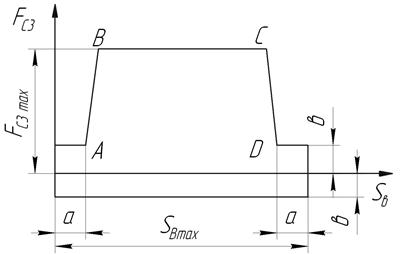
Рис.4.8. Закон изменения силы сопротивления для вертикального положения КПМ
Наклон прямых АВиСDне задается, а зависит от расположения двух соседних точек AиB или CиDмашинного расчета (определяется числом расчетных точек N, заданных для расчета на ЭВМ).
4.2.2. Расчет на ПК по программе А2Т
Исходные данные для программы А2Т представлены в табл. 4.2.
Таблица 4.2

| 
| 
| 
| 
| 
|
| 0,175 | 1,4 | +1 | 0,005 | 12,56 | 0,7 |

| 
| 
| 
| 
| 
|
| 10,5 | 0,22 | 0,2 | |||

| 
| 
| 
| 
| 
|
| 1,575 | 1,4 | 1,225 | |||

| 
| 
| |||
| N | KON | ||||
Новые параметры в таблице обведены рамкой:
rf- произведение радиуса цапфы и коэффициента трения во вращательной паре – одинаково для всех вращательных кинематических пар V класса;
 - коэффициент трения в поступательной паре;
- коэффициент трения в поступательной паре;
- координата У точки D на схеме механизма;
- максимальное значение силы сопротивления;
PR в - признак вертикальности, характеризующий расположение механизма: для горизонтальной направляющей ползуна PR в =0, а для вертикальной направляющей ползуна PR в =1.
Для вертикального расположения механизма все данные строчки 3 равны нулю.
Для горизонтального расположения механизма параметры и PR в всегда равны нулю.
Параметр может принимать любые значения, как для вертикального, так и для горизонтального положений механизма.
Расчет по программе А2Т проведен для значений параметров, указанных в табл.4.2. Исходные данные отличаются от данных рассмотренного выше примера признаком сборки и силовой нагрузкой.
Печать результатов расчета
В варианте программы силового расчета с учетом трения, зависящего от величины реакций, (шифр А2Т) на печать выведены результаты двух итераций: для первой итерации напечатаны значения лишь сил реакций, для второй итерации – значения параметров кинематического и силового расчетов.
1-я итерация
| строка 1 | 
|  
| 
| 
| 
| 
|
| строка 2 | 
| 
| 
| 
| 
|
2-я итерация
| строка 1 | 
| 
| 
| 
| 
| 
|
| строка 2 | 
| 
| 
| 
| 
| 
|
| строка 3 |
|
|
|
|
|
|
| строка 4 |
|
|
|
|
| 
|
Образец распечатки приведен в приложении 2.
На рис.4.9 и 4.10 приведены результаты расчета силовых характеристик механизма: годограф силы реакции  и зависимость уравновешивающего момента
и зависимость уравновешивающего момента  от положений кривошипа для двух итераций. Как следует из рисунков, учет переменной составляющей трения в кинематических парах приводит к изменению значений силовых параметров до 30%.
от положений кривошипа для двух итераций. Как следует из рисунков, учет переменной составляющей трения в кинематических парах приводит к изменению значений силовых параметров до 30%.
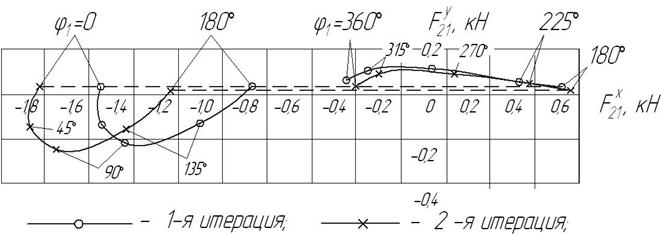
Рис.4.9. Годограф силы 
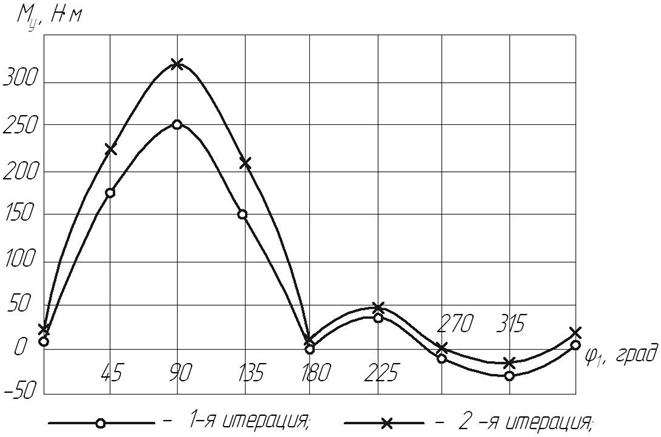
Рис.4.10. Зависимость уравновешивающего момента от положения
кривошипа сть зма: годограф силы реакциита силовых харак, для второй итерации - значения Таблица 4.2
5. ОФОРМЛЕНИЕ КУРСОВОЙ РАБОТЫ
Содержание курсового проекта (курсовой работы) должно быть отражено в пояснительной записке и на листе ватмана формата А1.
Титульный лист пояснительной записки оформляется по образцу, приведенному в приложении 3.
Пояснительная записка должна содержать полную информацию по расчету КПМ: техническое задание; технические условия, включающие структурную схему механизма и таблицу исходных данных; кинематический синтез схемы механизма; описание методов кинематического и силового расчетов КПМ; формулы и пояснения к ним; расчеты всех требуемых кинематических и силовых параметров с записью их размерностей; анализ результатов; рисунки, иллюстрирующие расчеты- схемы механизма, планы скоростей, ускорений, сил, кинематические характеристики звеньев, годографы сил и т.д., как это показано в учебном пособии; распечатка программы.
Лист ватмана отображает основные этапы расчета, повторяя частично содержание пояснительной записки.
На листе должны быть представлены следующие результаты: схема механизма для 8 положений начального звена с траекториями движений точек А, В,  ; схемы механизма в расчетном положении, иллюстрирующие кинематический расчет механизма аналитическим и графическим методами, а также силовой расчет механизма; планы скоростей, ускорений и сил; кинематические характеристики выходного звена 3; годограф силы реакции ; график изменения уравновешивающего момента в зависимости от угла
; схемы механизма в расчетном положении, иллюстрирующие кинематический расчет механизма аналитическим и графическим методами, а также силовой расчет механизма; планы скоростей, ускорений и сил; кинематические характеристики выходного звена 3; годограф силы реакции ; график изменения уравновешивающего момента в зависимости от угла  .
.
Лист должен быть выполнен в соответствии с требованиями ГОСТов.
ЗАКЛЮЧЕНИЕ
Для примера расчета получены следующие результаты.
1. Вычислены кинематические характеристики ведомых звеньев механизма, позволяющие сделать вывод о рациональности его параметров.
2. Получены силы и моменты сил, действующие на звенья механизма, позволяющие сделать их расчет на прочность при конструировании.
3. Выявлено влияние сил трения в кинематических парах механизма, позволяющее оценить его коэффициент полезного действия (КПД).
4. Вычислен уравновешивающий момент, позволяющий оценить потребную мощность для его привода. Для приведенного примера без учета потерь на трение она будет
 Вт.
Вт.
При подборе электродвигателя следует учесть КПД механизма.
Приложение 1
Образец распечатки результатов расчета на РС по программе AN2
| .1750 | 1.4000 | -1.0000 | .0000 | 12.5600 | .7000 |
| 7.0000 | 10.50000 | .2200 | 1.0000 | .0000 | 60.0000 |
| 1.5750 | 300.000 | 1.40000 | 300.0000 | 1.2250 | 200.0000 |
| УГОЛ ПОВОРОТА КРИВОШИПА =.000 ГРАДУСОВ | |||||
| 1.5750 | .0000 | -31.0577 | 3.1416 | -1.5700 | .0000 |
| .8750 | .0000 | .0000 | .0000 | -29.3323 | .0000 |
| -419.7572 | 34.3350 | 283.1011 | 34.3350 | .0000 | 68.6700 |
| .0000 | 68.6700 | -419.1011 | 34.3350 | 6.0086 | 60.6700 |
| УГОЛ ПОВОРОТА КРИВОШИПА = 15.000 ГРАДУСОВ | |||||
| 1.5683 | -.6376 | -29.6597 | 3.1092 | -1.5173 | 5.0319 |
| .8687 | .0226 | -.6032 | 1.0616 | -28.1629 | -3.5726 |
| -396.8919 | 26.6782 | 268.4214 | 16.9836 | .0000 | 59.9943 |
| .0000 | 59.9943 | -396.8919 | 26.6782 | 22.4862 | 60.0000 |
| УГОЛ ПОВОРОТА КРИВОШИПА = 30.000 ГРАДУСОВ | |||||
| 1.5488 | -1.2182 | -25.6472 | 3.0791 | -1.3623 | 9.7627 |
| .8502 | .0437 | -1.1586 | .8518 | -24.7778 | -6.9017 |
| -331.0651 | 16.1270 | 226.2909 | 4.2309 | .0000 | 53.6179 |
| .0000 | 53.6179 | -331.0651 | 16.1270 | 31.4123 | 60.0000 |
| УГОЛ ПОВОРОТА КРИВОШИПА = 45.000 ГРАДУСОВ | |||||
| 1.5183 | -1.6921 | -19.5437 | 3.0531 | -1.1145 | 13.8881 |
| .8210 | .0619 | -1.6232 | .7771 | -19.5278 | -9.7605 |
| -230.1336 | 1.1795 | 162.1088 | -.8331 | .0000 | 51.0859 |
| .0000 | 51.0859 | -230.1336 | 1.1795 | 28.6235 | 60.0000 |
| УГОЛ ПОВОРОТА КРИВОШИПА = 60.000 ГРАДУСОВ | |||||
| 1.4793 | -2.0232 | -12.0781 | 3.0331 | -.7896 | 17.1104 |
| .7834 | .0756 | -1.9634 | .5495 | -12.9408 | -11.9541 |
| -105.7304 | -17.4251 | -83.8180 | 2.4162 | .0000 | 52.7106 |
| .0000 | 52.7106 | -105.7304 | -17.4251 | 14.4992 | 60.0000 |
| УГОЛ ПОВОРОТА КРИВОШИПА = 75.000 ГРАДУСОВ | |||||
| 1.4351 | -2.1923 | -4.1381 | 3.0206 | -.4093 | 19.1673 |
| .7402 | .0845 | -2.1577 | 0.2844 | -5.6416 | -13.3331 |
| 28.7339 | -36.7581 | .4447 | 12.0964 | .0000 | 57.5507 |
| .0000 | 57.5507 | 28.7339 | -36.7581 | -6.5220 | 60.0000 |
| УГОЛ ПОВОРОТА КРИВОШИПА = 90.000 ГРАДУСОВ | |||||
| 1.3890 | -2.1980 | 3.4781 | 3.0163 | .0000 | 19.8751 |
| .6945 | 0.0875 | -2.1982 | .0000 | 1.7391 | -13.8034 |
| 160.3690 | -52.6469 | -79.5255 | 24.6928 | .0000 | 63.8488 |
| .0000 | 63.8488 | 160.3690 | -52.6469 | -28.0646 | 60.0000 |
| УГОЛ ПОВОРОТА КРИВОШИПА = 105.000 ГРАДУСОВ | |||||
| 1.3445 | -2.0539 | 10.1523 | 3.0206 | 0.4093 | 19.1673 |
| .6496 | .0845 | -2.0885 | -.2844 | 8.6487 | -13.3331 |
| 278.8154 | -61.0922 | -149.6042 | 36.4305 | .0000 | 69.7177 |
| .0000 | 69.7177 | 278.8154 | -61.0922 | -44.3631 | 60.0000 |
Приложение 2
Образец распечатки результатов расчёта на РС по программе А2Т
| 0.1750 | 1.4000 | 1.0000 | 0.0050 | 12.5664 | 0.7000 |
| 7.0000 | 10.50000 | 0.2200 | 0.0 | 0.0 | 0.2000 |
| 1.5750 | 1400.0000 | 1.4000 | 1400.0000 | 1.2250 | 1100.0000 |
| 0.0 | 0.0 | ||||
| УГОЛ ПОВОРОТА КРИВОШИПА = 0.0 ГРАДУСОВ | |||||
| -1535.2461 | 34.3350 | 1353.8923 | 54.3349 | 0.0000 | 768.6680 |
| -0.0004 | -631.3279 | -1532.2461 | 54.3350 | 6.0086 | |
| -1.2250 | 0.0 | -24.1805 | 0.0 | 1.5700 | 0.0 |
| -0.5285 | 0.0000 | -0.0000 | 1.0994 | -25.9077 | -0.0000 |
| -1015.2449 | 33.6875 | 1653.98.11 | 34.9855 | 153.7340 | 730.2112 |
| 126.2652 | -600.2239 | -1815.2449 | 33.6875 | 21.2516 | 1099.9973 |
| УГОЛ ПОВОРОТА КРИВОШИПА = 15.000 ГРАДУСОВ | |||||
| -1550.4880 | -31.0537 | 1362.12430 | 74.9602 | 0.0005 | 797.3167 |
| -0.0004 | -619.6214 | -1538.4888 | -31.0537 | 64.4340 | |
| -1.2362 | -0.5004 | -23.6967 | 0.0324 | 1.5101 | -5.0370 |
| -0.5506 | 0.0226 | -0.5345 | 1.0621 | -25.1950 | -3.5762 |
| -1821.8760 | -40.8500 | 1645.5119 | 84.4872 | 159.4630 | 771.2112 |
| 123.9239 | -583.7190 | -1821.8760 | -40.8508 | 91.0015 | 1113.3093 |
| УГОЛ ПОВОРОТА КРИВОШИПА = 30.000 ГРАДУСОВ | |||||
| -1545.5911 | -93.0946 | 1384.1565 | 113.4035 | 0.0005 | 840.7500 |
| -0.0004 | -624.3416 | -1545.5911 | -93.0946 | 121.1303 | |
| -1.2457 | -0.9803 | -22.1917 | 0.0628 | 1.3630 | -0.7726 |
| -0.5471 | 0.0438 | -1.0399 | 0.9522 | -23.0621 | -6.9837 |
| -1838.6009 | -112.0152 | 1677.1743 | 132.3242 | 168.1505 | 818.6467 |
| 124.8699 | -583.3176 | -1838.6089 | -112.0152 | 159.3857 | 1151.1440 |
| УГОЛ ПОВОРОТА КРИВОШИПА = 45.000 ГРАДУСОВ | |||||
| -1349.2106 | -147.6787 | 1412.7480 | 147.9560 | 0.0006 | 893.8520 |
| -0.0004 | -642.8916 | -1349.2156 | -147.6787 | 173.4313 | |
| -1.2700 | -1.4170 | -19.3271 | 0.0005 | 1.1151 | -13.0022 |
| -0.5733 | 0.0619 | -1.4060 | 0.7775 | -19.5340 | -9.7704 |
| -1856.5645 | -173.4393 | 1719.5269 | 175.7166 | 178.7711 | 875.4553 |
| 128.5779 | -506.7341 | -1856.5645 | -175.4593 | 223.5909 | 1207.4426 |
Приложение 3
Министерство образования и науки
Российской Федерации
Казанский государственный технический университет
им. А. Н. Туполева
Кафедра основ конструирования
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОМУ ПРОЕКТУ (КУРСОВОЙ РАБОТЕ) ПО ТММ
Выполнил: студ. гр. ……………
……………………….
Принял: ………………………….
Казань 2008
Список литературы
1. Фролов К.В. и др. Теория механизмов и механика машин: Учеб. для втузов. – М.: Высшая школа, 2001. 496 с.
2. Попов С.А., Тимофеев Г.А. Курсовое проектирование по теории механизмов и механике машин. – М.: Высшая школа, 2002. 412 с.
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 519; Нарушение авторских прав?; Мы поможем в написании вашей работы!