КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Система управления
|
|
|
|
Классификация систем
В теории управления организационными системами все рассматриваемые системы могут быть классифицированы (рис. 5): – по степени обусловленности строения и поведения системы; – по степени Рис. 5 сложности строения и поведения системы; – по целенаправленности поведения системы.
По степени обусловленности строения и поведения системы различают детерминированные и стохастические (вероятностные) системы.
Детерминированные системы обладают вполне определенным строением и поведением. Такие системы однозначно реагируют на внешние воздействия. Полное описание этих систем возможно даже в случае большого количества элементов и связей в системе.
Если известны, например, состояние системы и программа перехода ее в другие состояния, то всегда можно точно описать состояние, в которое перейдет система под влиянием различных воздействий.
В вероятностных системах элементы взаимодействуют между собой, а также с внешней средой случайным образом. Такая система всегда остается неопределенной в той или иной степени, и описание ее будущего поведения никогда не выходит за рамки вероятностных категорий, с помощью которых это поведение описывается. Полное описание вероятностных систем возможно только в этих рамках на уровне количественных характеристик и законов распределения вероятностей состояний систем.

|
Рис. 5 Классификация систем
По степени сложности строения и поведения различают простые, сложные и очень сложные (сверхсложные) системы.
Простыми принято считать системы, имеющие малое количество элементов и связей между ними; элементы таких систем также являются простыми. Простота элементов означает, что с достаточной степенью точности свойства и закономерности изменения состояния элементов могут быть описаны известными математическими соотношениями.
|
|
|
Сложные системы имеют большое количество элементов и связей между ними. Они обладают разветвленной структурой, а их элементы выполняют сложные функции и сами являются сложными системами. Однако эти системы при введении гипотез о простоте свойств элементов могут быть сведены к простым, что позволяет составить математическое описание таких систем с достаточной точностью.
Очень сложные (сверхсложные) системы имеют исключительно большое число и многообразие элементов и связей между ними. Никакое сколь угодно подробное знание строения и поведения элементов таких систем не позволяет определить полностью поведение систем, никакое сколь угодно точное знание поведения сверхсложной системы на любом конечном интервале в настоящем не позволяет точно предсказать ее поведение на любом конечном интервале в будущем.
По целенаправленности поведения системы подразделяются на целенаправленные и нецеленаправленные (казуальные).
Определение 19. Целенаправленными (целеустремленными) называются системы, поведение которых направлено на достижение цели.
Системы, поведение которых не обусловлено наличием цели, называются нецеленаправленными.
Определение 20. Цель – желаемый результат деятельности, который может быть достигнут в пределах некоторого интервала времени.
Такое понятие цели присуще весьма высокоорганизованным системам, к которым относятся живые существа, обладающие сознанием. Для технических систем под целью понимается состояние, к которому стремится система. На достижение этого состояния направлены организация и поведение системы.
Другие аспекты классификации систем по поведению представлены на рис. 5.
Организационные системы по рассмотренной классификации относятся к стохастическим сложным и очень сложным системам, обладающим активным целенаправленным поведением с учетом и прогнозированием результатов этого поведения. Такое сложное целенаправленное поведение системы возможно только при наличии у нее способности изменять свое поведение в нужном направлении. Свойство, характеризующее эту способность системы, называется управляемостью, воздействие на систему с целью изменения ее поведения в нужном направлении – управлением, а системы, в которых реализуется процесс управления – системами управления.
|
|
|
Любое управление подразумевает оказание воздействия на объекты с целью изменения их поведения в желаемом направлении. Следовательно, для осуществления управления в некоторой системе необходимо наличие объектов, вырабатывающих такие воздействия, а также объектов, на которые эти воздействия оказываются. Поэтому в любой системе управления можно выделить в качестве подсистем две системы – управляемую и управляющую.
Определение 21. Система управления – это система, целесообразное (целенаправленное) поведение которой обеспечивается путем выработки соответствующих воздействий и оказания этих воздействий на элементы системы.
Определение 22. Управляемая система – это подсистема системы управления, состоящая из объектов, на которые оказывается воздействие для обеспечения целесообразного поведения системы управления.
Определение 23. Управляющая система – это подсистема системы управления, вырабатывающая и оказывающая воздействия на управляемую подсистему для обеспечения целесообразного поведения системы управления.
Структурная схема системы управления, представленной в виде взаимодействующих управляющей и управляемой систем, приведена на рис. 6.
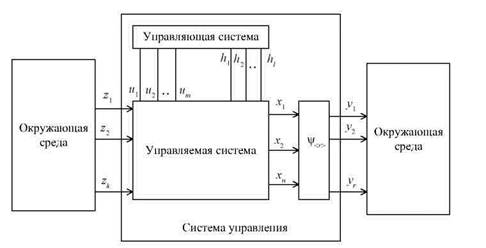
Рис. 6. Структурная схема системы управления
На схеме приняты следующие обозначения:
Z<k>(t) = <z1(t), z2(t),..., zk(t)> – возмущающие переменны е, характеризующие воздействия окружающей среды на систему управления в момент времени t;
U<m>(t) = <u1(t), u2(t),..., um(t)> – управляющие переменные, характеризующие целенаправленные воздействия управляющей системы на управляемую систему в момент времени t;
|
|
|
X<n>(t) = <x1(t), x2(t),..., xn(t) > – переменные состояния, характеризующие состояние управляемой системы в момент времени t;
Y<r>(t) = <y1(t), y2(t),..., yr(t)> – выходные переменные, характеризующие выходную ситуацию или воздействие системы управления на окружающую среду в момент времени t;
H<l>(t) = <h1(t), h2(t),..., hl(t)> – наблюдаемые переменные – это те переменные состояния и выходные переменные, которые наблюдаются управляющей системой в момент времени t.
Введенные переменные часто называют параметрами. Аргументы у всех переменных на схеме для краткости опущены.
Выходные переменные в общем случае связаны с переменными состояния функциональной зависимостью
 (1)
(1)
Где  - символ вектор-функции.
- символ вектор-функции.
Используя введенные переменные, можно составить следующую математическую модель системы управления:
 (2)
(2)
где  - начальное состояние управляемой системы;
- начальное состояние управляемой системы;
A(t) – область допустимых значений векторов переменных состояния управляемой системы;
B(t) – область допустимых значений векторов управляющих переменных;
C(t) – область допустимых значений векторов наблюдаемых переменных.
Выражения (2) описывают состояние системы в любой момент времени на интервале [t0,T], а совместно с выражением (1) – выходную ситуацию в том же интервале времени.
Уравнение (1) в модели (2) представляет собой функциональную зависимость вектора состояний системы от начального состояния управления, возмущений, наблюдаемости системы, времени. Выражения (2)–(4) в этой модели являются математической формулировкой ограничений на состояния системы, управление и наблюдаемость переменных.
Все учитываемые ограничения можно разделить на два рода:
– ограничения первого рода, обусловленные действием законов и закономерностей природы;
– ограничения второго рода, обусловленные конечной величиной ресурсов, а также различных величин, которые не могут или не должны превосходить определенных пределов.
Теория управления организационными системами изучает не любые системы, а только определенный класс систем, в состав которых входят коллективы людей. Эти системы часто называют просто организациями. Наличие коллективов людей приводит к тому, что организационные системы как системы управления обладают следующими особенностями:
|
|
|
– сложной организацией, т. е. сложной структурой с большим количеством связей и сложной программой;
– сложным поведением в меняющейся среде;
– адаптивной устойчивостью поведения, т. е. одна и та же линия поведения системы может быть реализована при различном состоянии окружающей среды;
– наличием информационных процессов с обязательным включением стадий преобразования циркулирующей в системе информации.
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 588; Нарушение авторских прав?; Мы поможем в написании вашей работы!