КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Теоретическое введение. Обработка результатов
|
|
|
|
ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
ЛАБОРАТОРНАЯ РАБОТА 14
Обработка результатов
1. По результатам измерения вычислить:
• мощность на валу двигателя Р2;
• скольжение S;
• КПД η
• коэффициент мощности cos φ.
2. Построить механическую характеристику n (М).
3. В одной координатной системе построить рабочие характеристики АД: I, М, S, Pi, cos φ, η в функции P2.
Контрольные вопросы
1. Чему равен момент асинхронного двигателя при n=nс? Почему М увеличивается при снижении n?
2. Почему вращающийся на холостом ходу АД не останавливается при обрыве одной фазы? Как при этом изменяется ток в оставшихся фазах?
3. Почему при n =0 момент двигателя (Мn) оказывается не максимальным?
4. Как изменяется мощность на валу двигателя при переключении его с треугольника на звезду при соответствующем увеличении линейного напряжения cети в  раз'
раз'
5 Во сколько раз уменьшится пусковой момент двигателя, если напряжение cети уменьшилось на 30%?
6. По какой схеме включен ваттметр (рис. 13.4)?
Цель работы
Ознакомиться с принципом действия и характеристиками двигателя постоянного тока
Двигатель постоянного тока состоит из статора и ротора.
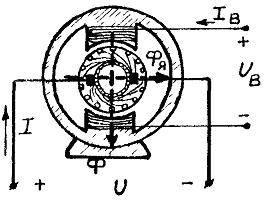
На обмотку возбуждения ОB, расположенную на полюсах статора, подается постоянное напряжение UB (рис. 14.1). Протекающий через обмотку ток IВ создает постоянный поток возбуждения Ф. В современных малоинерционных двигателях, предназначенных для быстродействующих приводов, вместо обмотки возбуждения используются постоянные магниты.
На обмотку ротора, который в этом двигателе является якорем, через угольные или медно-графитовые щетки и коллектор подастся постоянное напряжение U.
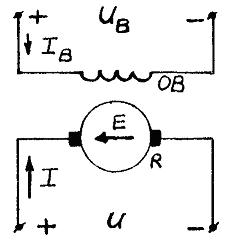
На принципиальных схемах двигатель изображается так, как это показано на рис. 14 2.
| 
|
| Рисунок 14.1 | Рисунок 14.2 |
При пуске двигателя, т.е. при подаче на неподвижный якорь напряжения U в цепи якоря протекает ток  (R - сопротивление якоря)
(R - сопротивление якоря)
Этот тока создает магнитный поток якоря ФЯ, перпендикулярный потоку возбуждения Ф, как это показано на рис. 14 1. В результате взаимодействия потоков возникает вращающий момент М, стремящийся повернуть якорь до совпадения потока Фл с потоком Ф.
Момент М пропорционален току якоря I и потоку Ф:
М=См 1 Ф, (14.1)
где:
См - постоянный коэффициент.
Под действием момента М якорь начинает вращаться. При этом независимо от вращения якоря поток ФЯ остается перпендикулярным потоку Ф, так как ток I щеточно-коллекторым механизмом всегда подается в тe витки якоря, которые в данный момент оказываются под полюсами. Пока действует момент М, двигатель, не заторможенный внешним моментом нагрузки, разгоняется. Чтобы ответить на вопрос, до какой скорости paзгоняется двигатель на холостом ходу, нужно учесть генераторную ЭДС Е, наводимую в якоре, вращающемся в потоке возбуждения Ф.
Если на якорь не подать напряжение U и помощью внешнею момента вращать его в потоке возбуждения Ф, двигатель превратится в генератор постоянного тока и будет вырабатывать генераторную ЭДС Е = СеnФ, (14.2)
где-
Се - постоянный коэффициент пропорциональности
Эта же генераторная ЭДС наводится в якоре и в том случае, когда машина работает в режиме двигателя. Она направлена против напряжения U и уменьшает ток якоря. Поэтому во вращающемся якоре ток определяется выражением:
В момент пуска, когда n=0 и, следовательно, E=0, в якоре протекает
пусковой ток  , во много раз превышающий допустимое по условиям работы коллектора значение. Для ограничения пускового тока раньше пользовались реостатами, включаемыми в цепь якоря; в современных тиристорных электроприводах пусковой ток ограничивается снижением напряжения U во время разгона двигателя.
, во много раз превышающий допустимое по условиям работы коллектора значение. Для ограничения пускового тока раньше пользовались реостатами, включаемыми в цепь якоря; в современных тиристорных электроприводах пусковой ток ограничивается снижением напряжения U во время разгона двигателя.
На холостом ходу двигатель разгоняется до такой n, при которой Е становится почти равной напряжению U, и поэтому в якоре протекает тишь небольшой ток холостого хода, создающий момент М, равный статическому моменту нагрузки холостого хода Мсх. При идеальном холостом ходе двигатель разогнался бы до частоты вращения идеального холостого хода n0 при которой E =U и, следовательно, I=0 и М=0.
При нагружении двигателя моментом нагрузки частота вращения nначинает снижаться. Но при этом уменьшается генераторная ЭДС Е = Сe • n • Ф, а начальное уменьшение Е приводит к резкому увеличению тока I и момента М, развиваемого двигателем. Скорость снижается до такой n, при которой, момент двигателя М становится равным моменту нагрузки. Связь между моментом двигателя М и частотой вращения n определяется уравнением:

где:
 - частота вращения идеального холостого хода.
- частота вращения идеального холостого хода.
 - угловой коэффициент.
- угловой коэффициент.

Рис. 14.3
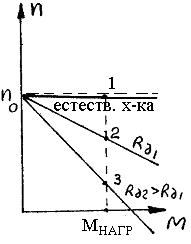
По этому уравнению строится механическая характеристика двигателя n (М), изображенная на рис. 14.3. Механическая характеристика позволяет для любой частоты вращения nопределить момент М. Так, при n=n0 М=0 (рабочая точка 1 соответствует идеальному холостому ходу, когда E=U, I=0, М=0). Точка 2
соответствует реальному холостому ходу (n2<n0, E<U и поэтому I ≠ 0, к двигатель развивает момент М=Мсх). В рабочей точке 3 двигатель нагружен номинальным моментом нагрузки Мн вращается с номинальной частотой вращения n0и развивает момент М3, равный моменту Мн
Кратковременно двигатель можно нагрузить максимально допустимым моментом Ммакс (рабочая точка перейдет в точку 4), но длительная работа при нагрузках, больших Мн, приводит к перегреву двигателя и резкому сокращению срока службы изоляции. Нагружать двигатель моментом, большим Ммакс, даже кратковременно, нельзя, так как при этом ток якоря становится больше допустимого тока Iмакс, что сокращает срок службы коллектора.
Современные двигатели постоянного тока допускают перегрузку по току 
, равную 3-4. малоинерционные двигатели, используемые в быстродействующих тиристорных электроприводах, рассчитаны на 9-10 - кратную перегрузку. Практически во столько же раз Ммакс оказывается больше номинального момента МН ,благодаря чему двигатели постоянного тока обладают значительно большим быстродействием по сравнению с асинхронными двигателями.
Основным преимуществом двигателя постоянного тока перед асинхронным является то, что его скорость вращения может регулироваться в очень широком диапазоне. Из уравнения механической характеристики видно, что скорость вращения можно регулировать тремя способами:
• введением добавочного сопротивления Rg в цепь якоря,
• ослаблением потока возбуждения Ф,
• изменением напряжения U от нуля до Uн
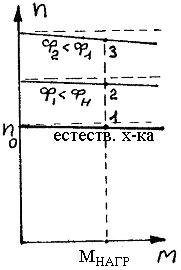
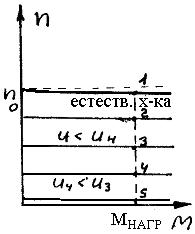
При введение добавочного сопротивления, при ослаблении потока или изменении напряжения вместо исходной механической характеристики (ее называют естественной характеристикой) получаются искусственные характеристики, изображенные на рис 14.4.
| 
| 
|
| а | б | в |
| Рис. 14.4 |
При введении Rg нагруженный двигатель вращается медленнее (рис.14.4.а). В настоящее время этот способ не применяется, так как неэкономичен и не обеспечивает стабильности вращения при малых n.
Регулирование n ослаблением потока Ф (рис 14.4, б) экономически оправдано, но обеспечивает диапазон регулирования Д=nмакс/nмикс равный всего лишь 3-5. Поток Ф можно только уменьшать, так как в номинальном режиме двигатель работает с максимально возможным. Потоком возбуждения и увеличивать его из-занасыщения железа невозможно. При ослаблении потока Ф скорость вращения двигателя увеличивается. Это объясняется тем, что при уменьшении Ф уменьшается противо-ЭДС Е=СеnФ, а это приводит к очень резкому увеличению тока в якорной цепи и, несмотря на уменьшение Ф, к увеличению момента М. Если, например при холостом ходе поток Ф ослабить вдвое, двигатель почти вдвое увеличит час югу вращения, чтобы при ослабленном потоке ЭДС Е вновь стада почти равной напряжению U
Способ с изменением напряжения U, подводимого к якорю, является основным способом регулирования скорости вращения двигателя постоянного тока. Как видно из уравнения механической характеристики, при уменьшении U пропорционально уменьшается скорость идеального холостого хода n0, а угловой коэффициент b не изменяется, т. е. при изменении U искусственные механические характеристики смещаются, оставаясь параллельными естественной характеристике.
До появления тиристорных преобразователей для регулирования постоянного напряжения использовались генераторы постоянного тока (регулирование n осуществлялось с помощью системы ГД – "генератор-двигатель"). В современных электроприводах постоянное напряжение U регулируется тиристорным преобразователем (управляемым выпрямителем на тиристорах). В серийных тиристорных электроприводах диапазон регулирования достигает 10000 и. более. Это означает, что двигатель может вращаться с любой скоростью от nн до долей оборота в минуту.
|
|
|
|
|
Дата добавления: 2015-01-03; Просмотров: 385; Нарушение авторских прав?; Мы поможем в написании вашей работы!