КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Модульная организация микроконтроллеров. Процессорное ядро, изменяемый функциональный блок
|
|
|
|
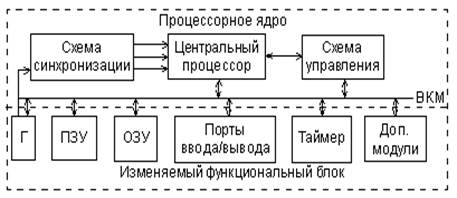
При модульном принципе построения все МК одного семейства содержат процессорное ядро, одинаковое для всех МК данного семейства, и изменяемый функциональный блок, который отличает МК разных моделей.
Процессорное ядро включает в себя:
- центральный процессор;
- внутреннюю контроллерную магистраль (ВКМ) в составе шин адреса, данных и управления;
- схему синхронизации МК;
- схему управления режимами работы МК, включая поддержку режимов пониженного энергопотребления, начального запуска (сброса) и т.д.
Изменяемый функциональный блок включает в себя модули памяти различного типа и объема, порты ввода/вывода, модули тактовых генераторов (Г), таймеры. В относительно простых МК модуль обработки прерываний входит в состав процессорного ядра. В более сложных МК он представляет собой отдельный модуль с развитыми возможностями. В состав изменяемого функционального блока могут входить и такие дополнительные модули как компараторы напряжения, аналого-цифровые преобразователи (АЦП) и другие. Каждый модуль проектируется для работы в составе МК с учетом протокола ВКМ. Данный подход позволяет создавать разнообразные по структуре МК в пределах одного семейства.
5.6. Обобщённая структурная схема микроконтроллерных систем управления, этапы разработки, пример.
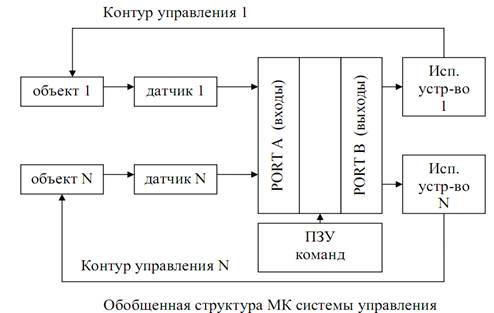
Микроконтроллером называется программируемое цифровое однокристальное функционально законченное устройство управления объектами, выполненное в виде интегральной микросхемы.
Система включает в себя совокупность внешних объектов, состояние которых изменяется как под воздействием внешних факторов, так и за счет их взаимодействия между собой. Текущее состояние объектов контролируется соответствующими датчиками, сигналы с которых поступают на входы «Портов А, В» микроконтроллера. МК анализирует их и в соответствии с записанной в ПЗУ (внутреннем или внешнем) программой формирует на выходах управляющие сигналы, которые в свою очередь, через исполнительные устройства воздействуют на объекты и изменяют требуемым образом их состояния, образуя замкнутый контур управления.
Этапы разработки МК систем, пример:
В качестве исходных данных при разработке МК систем управления чаще всего выступают:
- словесное описание работы системы;
- вид сигналов с датчиков, соответствующих всем возможным состояниям
объектов, и сигналов, требуемых для управления объектами через исполнительные устройства в соответствии с функциональным назначением системы;
В процессе проектирования требуется разработать:
- схему соединения МК с элементами управления;
- алгоритм работы МК по анализу входных и формированию выходных сигналов (на практике целесообразно оформлять его в виде блок-схемы);
- текст программы на ассемблере имеющегося контроллера, записываемый вего ПЗУ
Исходные данные:
- в резервуар Р через управляемую задвижку 1 поступает жидкость (управляемая задвижка 2 при этом - закрыта). При достижении уровня воды в резервуаре «верхнего» уровня (определяемого датчиком D1), задвижка 1 – закрывается, и одновременно открывается задвижка 2. По мере расхода жидкости из резервуара и достижении «нижнего» уровня (определяемого датчиком D2) происходит обратный процесс: задвижка 1 – открывается, задвижка 2 - закрывается и жидкостьвновь начинает наполнять резервуар. Далее процесс повторяется. Т.е. фактически система позволяет поддерживать уровень жидкости в резервуаре в пределах, устанавливаемых датчиками D1, D2.
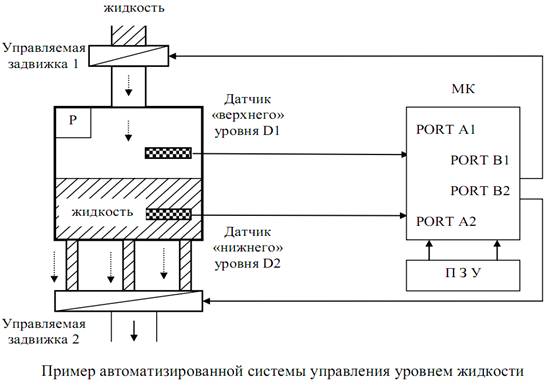
- сигналы с датчиков – цифровые, причем если датчик находится в воде, то на его выходе формируется сигнал логической «1», в противном случае – «0», для открывания задвижки необходимо сформировать сигнал логической «1», для закрывания – «0».
блок-схема алгоритма работы МК
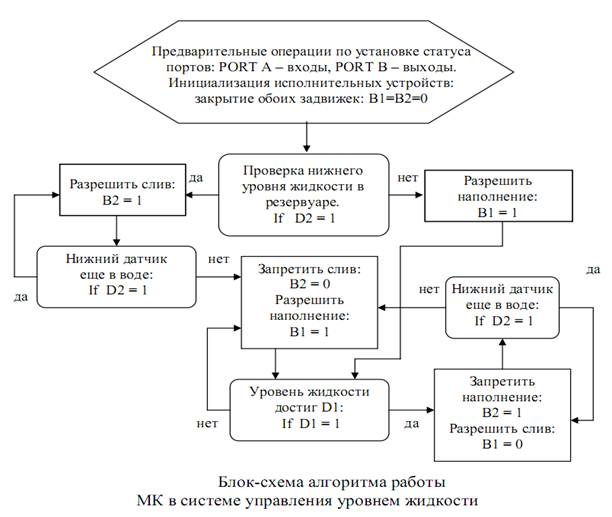
Вначале, учитывая двунаправленный характер контактов МК, необходимо установить требуемый режим их работы в соответствии с рис. 4. Далее, учитывая неопределенность исходного состояния системы, необходимо установить некоторое устойчивое ее состояние: в данном случае наиболее целесообразно закрыть обе задвижки, т.к. в таком состоянии система может находиться сколь угодно долго.
Затем необходимо проверить текущий уровень жидкости в резервуаре и в зависимости от него включить один из возможных режимов: слив или наполнение. В данном случае это сделано по состоянию «нижнего» датчика D2. Если он в воде, то открывается задвижка 2 и начинается слив до снижения уровня жидкости ниже D2, если нет – открывается задвижка 1 и начинается наполнение до достижения уровня D1. Далее указанные режимы чередуются с учетом текущего уровня жидкости. Обратите внимание, что в программе отсутствует точка выхода, свойственная блок-схемам программного обеспечения вычислительного характера, т.е. микроконтроллер функционирует циклически.
Таким образом, можно сформулировать два этапа разработки блок-схем, свойственные ВСЕМ практическим системам, использующим МК:
- инициализация портов МК и фиксация исходного состояния его управляющих выходов, независимо от состояния всех входных сигналов;
- разработка блок-схемы с учетом установленного исходного состояния;
- степень детализации блок-схемы определяется в каждом конкретном случае самим разработчиком с учетом возможности реализации требуемых операций данной архитектурой микроконтроллера (т.е. наличием соответствующих ко-
манд).
5.7. Структурная схема однокристального микроконтроллера на примере микросхемы PIC 16C52. Принципы работы, назначение регистров, организация памяти.
В основе работы контроллера лежит выполнение полученной команды АЛУ для двух байт: находящихся в рабочем регистре W и любом из других регистров схемы с последующим сохранением результата в любом из них путем передачи результата в него по общей шине данных. Такой механизм связан с тем, что в каждый конкретный момент времени подключенным к ШД может быть ТОЛЬКО ОДИН регистр, а W – подключен к ней всегда.
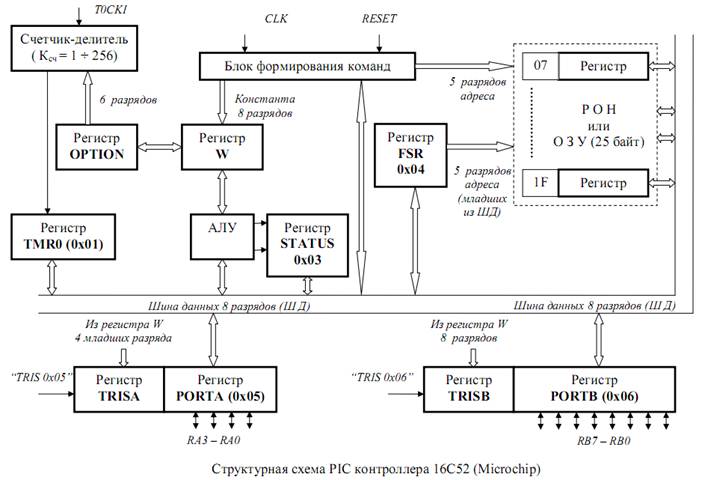
В процессе работы АЛУ контролирует «правильность» полученного после выполнения команды результата, например, возникновение переноса в 9 разряд, деление на ноль и т.д.). Для этого служит специальный регистр состояния STATUS, разряды (называемые флагами) которого изменяются при возникновении подобных явлений.
ОЗУ контроллера содержит 25 регистров общего назначения (РОН), подключенных к общей шине данных, причем адресация (выбор) конкретного из них может осуществляться двумя способами: непосредственно и косвенно.
Косвенная адресация осуществляется с помощью специального регистра FSR, преобразующим 8-разрядное входное слово, поступающее к нему на вход по шине данных, в выходное 5-разрядное слово, являющееся адресом конкретного регистра в ОЗУ.
Для организации взаимодействия МК с внешними устройствами используются 2 способа:
1). Информация передается через порты ввода/вывода PORT_Aи PORT_B.
2). Использование входа TOCKI для организации подсчета числа внешних событий.
|
|
|
|
|
Дата добавления: 2014-12-23; Просмотров: 3558; Нарушение авторских прав?; Мы поможем в написании вашей работы!