КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Промышленные контроллеры. Структура систем сбора, обработки данных и управления с их использованием
|
|
|
|
Промышленным контроллером называется программируемое устройство на основе однокристального микроконтроллера, содержащее УСО, соединенное с ним по внутренней шине, конструктивно выполненное в виде функционально законченного модуля и предназначенное для работы в промышленных условиях.
Устройством связи с объектом (УСО), иногда называемым устройством ввода/вывода, называется преобразователь аналоговых сигналов в цифровые и обратно, осуществляющий физическую связь контроллера с датчиками и исполнительными устройствами системы.
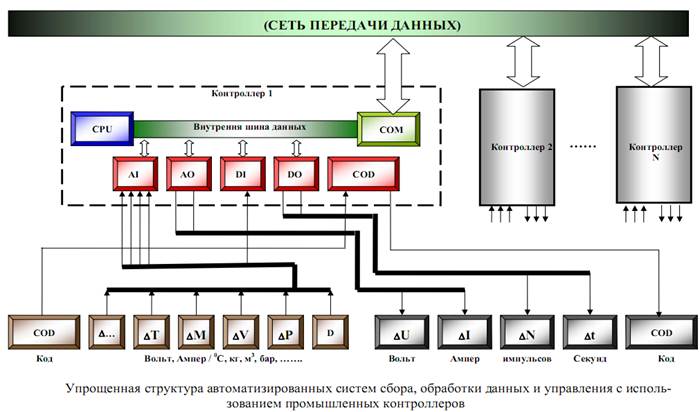
Контроллер содержит однокристальный микроконтроллер (CPU), модули аналогового и цифрового ввода/вывода (ADIO), а также коммуникационный модуль, обеспечивающий двунаправленный обмен данными между контроллерами в сети. Все модули контроллера размещаются на одной плате и соединены общей шиной. Структура является типовой для микропроцессорных устройств, поэтому отметим лишь назначение входящих модулей:
- модуль AI (аналоговый вход, АЦП) принимает сигналы с преобразователей (датчиков) температуры, давления, массы и т.д. в напряжение или ток и преобразует их в параллельный код на внутренней шине контроллера;
- модуль AO (аналоговый выход, ЦАП) формирует сигналы управления аналоговыми исполнительными устройствами в виде тока или напряжения заданного закона изменения;
- модуль DI (цифровой вход) принимает сигналы с дискретных датчиков (концевые выключатели, датчики открывания и т.д.) и передает их на внутреннюю шину;
- модуль DО (цифровой выход) формирует сигналы управления дискретными исполнительными устройствами в виде импульсов напряжения управляемой длительности (Δt), или «пачки» импульсов;
- модуль COD (двунаправленный цифровой модуль) работает с так называемыми «интеллектуальными» устройствами (датчиками и исполнительнымиустройствами), содержащими встроенные средства формирования параллельного или последовательного цифрового кода НЕСОВМЕСИМОГО с кодом внутренней шины контроллера.
10. Протокол CAN 2.0, спецификация ISO 11898, основные параметры физического, канального и уровня приложений.
Протоколом CAN (ControllerAreaNetwork) называется комплекс аппаратно-ориентированных требований к построению распределенных сетей контроллеров в режиме реального времени с гарантированным временем отклика и топологией «общая шина».
Особенности протокола:
- протокол ориентирован на реализацию в виде микросхем, устройств, но никак не ПК с соответствующей программной поддержкой, в силу отсутствия в составе системного блока аппаратной поддержки линии передачи CAN;
- протокол является сетевым без ограничения числа контроллеров в «мультимастерном» режиме (топология «общая шина»);
- протокол обеспечивает функционирование контроллеров в режиме реального времени с заранее известным и гарантированным временем получения ответа на свой запрос для каждого из контроллеров.
В спецификации CAN 2.0В ISO 11898 конкретизирована совокупность требований к устройствам CAN сети для физического, канального и уровня приложений семиуровневой модели OSI.

Рассмотрим физический уровень протокола CAN 2.0:
- в качестве линии передачи используется двухпроводная витая дифференциальная шина с линиями CAN_L и CAN_H и параллельным подключением контроллеров и активными согласующими резисторами 120 Ом;
- логической «1» соответствует момент времени, когда напряжение на линиях CAN_L и CAN_H – одинаковы, такой уровень называется рецессивным, логическому «0» - когда напряжения на линии CAN_H больше напряжения на линии CAN_L, такой уровень называется доминантным. Учитывая аппаратную реализацию выходных каскадов передатчиков в виде транзисторных ключей, такой выбор логических уровней приводит к аппаратному подавлению логической «1» логическим «0», которыйдоминирует, в результате чего на линии будет зарегистрирован «0»;
- скорость передачи данных при длине линии до 40 м, составляет 1 Мбит/с.
На канальном уровне протокола CAN 2.0 определены форматы кадров сообщений и обеспечивающие их достоверный прием алгоритмы синхронизации, арбитража.
Необходимость введения таких механизмов связана прежде всего с тем, что CAN сеть – это сеть реального времени с поддержкой мультимастерного режима, что предусматривает выполнение двух основных требований:
- требования реального времени означает необходимость гарантированной доставки сообщения нескольким требуемым адресатам за фиксированное время;
- мультимастерный режим с возможностью начала одновременной передачи несколькими контроллерами (при возникновении какого-либо события) и, как следствие, необходимость в арбитраже таких ситуаций.
Гарантированность доставки сообщений нескольким адресатам обеспечивается двумя механизмами:
- широковещательным алгоритмом передачи, когда у устройств в сети нет адреса, и сообщение, переданное одним узлом, слышат все (в том числе и он сам), при этом аппаратно в каждом из них предпринимаются меры по фильтрации этих сообщений каждым узлом, чтобы обеспечить реакцию только тех, кому они предназначаются;
- наличием CRC блоков, и сравнением логического уровня бита передаваемого в линию с реальным физическим значением напряжения, полученногов результате этого на линии, за счет чего достигается очень высокий уровень достоверности передаваемых сообщений.
Данные передаются в последовательном коде в виде кадров – групп битов (иногда называемых фреймами). В сети может передаваться только 4 типа кадров, имеющих различный логический смысл (например, кадр данных, кадр запроса, кадр ошибки и т.д.).
- Кадр данных передает данные.
- Кадр запроса служит для запроса на передачу кадра данных с тем же идентификатором.
- Кадр ошибки передается узлом, обнаружившим ошибку в сети.
|
|
|
|
|
Дата добавления: 2014-12-23; Просмотров: 2528; Нарушение авторских прав?; Мы поможем в написании вашей работы!