КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Радионавигационные приборы
|
|
|
|
Лаг
Эхолот
Навигационный эхолот предназначен для надежного измерения, наглядного представления, регистрации и передачи в другие системы данных о глубине под килем судна. Эхолот должен функционировать на всех скоростях судна от 0 до 30 узлов, в условиях сильной аэрации воды, ледяной и снежной шуги, колотого и битого льда, в районах с резко меняющимся рельефом дна, скалистым, песчаным или илистым грунтом.
На судах устанавливаются гидроакустические эхолоты. Принцип их работы заключается в следующем: механические колебания, возбуждаемые в вибраторе-излучателе, распространяются в виде короткого ультразвукового импульса, доходят до дна и, отразившись от него, принимаются вибратором-приемником.
Эхолоты автоматически указывают глубину моря, которую определяют по скорости распространения звука в воде и промежутку времени от момента посылки импульса до момента его приема.
| Рис. Указатель эхолота | Рис. Принцип работы эхолота |
Эхолот должен обеспечивать измерение глубин под килем в диапазоне от 1 до 200 метров. Указатель глубин должен быть установлен в рулевой рубке, а самописец — в рулевой или штурманской рубке.
Для измерения глубин применяется также ручной лот в случаях посадки судна на мель, промера глубин у борта во время стоянки у причала и т.п.
Ручной лот состоит из свинцовой или чугунной гири и лотлиня. Гиря выполняется в форме конуса высотой 25-30 см и весом от 3 до 5 кг. В нижнем широком основании гири делается выемка, которая перед замером глубины смазывается солидолом. При касании лотом морского дна частицы грунта прилипают к солидолу, и после подъема лота по ним можно судить о характере грунта.
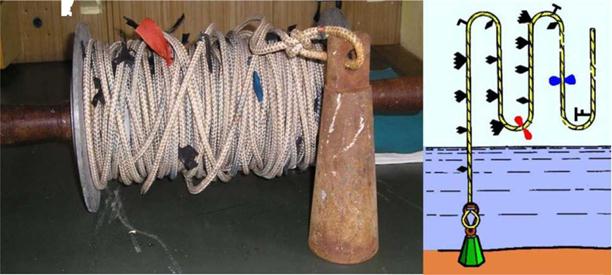
Рис. Ручной лот
Разбивка лотлиня производится в метрических единицах и обозначается по следующей системе: на десятках метров вплетаются флагдуки различных цветов; каждое количество метров, оканчивающееся цифрой 5, обозначаются кожаной маркой с топориками.
| Метры лотлиня | Марки | 
|
| 5 м | марка с одним топориком | |
| 10 м | красный флагдук | |
| 15 м | марка с двумя топориками | |
| 20 м | синий флагдук | |
| 25 м | марка с тремя топориками | |
| 30 м | белый флагдук | |
| 35 м | марка с четырьмя топориками | |
| 40 м | желтый флагдук | |
| 45 м | марка с пятью топориками | |
| 50 м | бело-красный флагдук |
В каждой пятерке первый метр обозначается кожаной маркой с одним зубцом, второй — маркой с двумя зубцами, третий — с тремя зубцами и четвертый — с четырьмя.
Примерно с конца XV в. получил известность простой измеритель скорости — ручной лаг. Он состоял из деревянной дощечки со свинцовым грузом формой в 1/1 круга, к которой прикреплялся легкий трос, имеющий узлы через равные промежутки (чаще всего 7 м). Для измерения скорости парусных судов, плававших в те времена, лаг, как приблизительно постоянная отметка на поверхности воды, бросали за борт и поворачивали песочные часы, отмеряющие определенную продолжительность времени (14 с). За время, пока сыпался песок, матрос считал количество узлов, которые проходили через его руки. Число узлов, полученных за это время, давало в пересчете скорость судна в морских милях в час. Этот способ измерения скорости объясняет возникновение выражения «узел».
Лаг — навигационный прибор для измерения скорости судна и пройденного им расстояния. На морских судах применяются механические, геомагнитные, гидроакустические, индукционные и радиодоплеровские лаги. Различают:
- относительные лаги, измеряющие скорость относительно воды; и
- абсолютные лаги, измеряющие скорость относительно дна.
Гидродинамический лаг ‑ относительный лаг, действие которого основано на измерении разности давления, которая зависит от скорости судна. Основу гидродинамического лага составляют две трубки, выведенные под днище судна: выходное отверстие одной трубки направлено к носовой части судна; а выходное отверстие другой трубки находится заподлицо с обшивкой. Динамическое давление определяется по разности высот воды в трубках и преобразуется механизмами лага в показания скорости судна в узлах. Кроме скорости, гидродинамические лаги показывают пройденное судном расстояние в милях.
Индукционный лаг — относительный лаг, принцип действия которого основан на зависимости между относительной скоростью проводника в магнитном поле и наводимой в этом проводнике электродвижущей силой (ЭДС). Магнитное поле создается электромагнитом лага, а проводником является морская вода. Когда судно движется, магнитное поле пересекает неподвижные участки водной среды, при этом в воде индуцируется ЭДС, пропорциональная скорости перемещения судна. С электродов ЭДС поступает в специальное устройство, которое вычисляет скорость судна и пройденное расстояние.

Гидроакустический лаг ‑ абсолютный лаг, работающий на принципе эхолота. Различают доплеровские и корреляционные гидроакустические лаги.
Геомагнитный лаг ‑ абсолютный лаг, основанный на использовании свойств магнитного поля Земли.
Радиолаг ‑ лаг, принцип действия которого основан на использовании законов распространения радиоволн.
На практике отсчеты лага замечают в начале каждого часа и по разности отсчетов получают плавание S в милях и скорость судна V в узлах. Лаги имеют погрешность, которая учитывается поправкой лага.
Судовая радиолокационная станция (РЛС) предназначена для обнаружения надводных объектов и берега, определения места судна, обеспечения плавания в узкостях, предупреждения столкновения судов.
В РЛС используется явление отражения радиоволн от различных объектов, расположенных на пути их распространения, таким образом, в радиолокации используется явление эха. РЛС содержит передатчик, приемник, антенно-волноводное устройство, индикатор с экраном для визуального наблюдения эхо-сигналов.
Принцип работы РЛС следующий. Передатчик станции вырабатывает мощные высокочастотные импульсы электромагнитной энергии, которые с помощью антенны посылаются в пространство узким лучом. Отраженные от какого-либо объекта (судна, высокого берега и т. п.) радиоимпульсы возвращаются в виде эхо-сигналов к антенне и поступают в приемник. По направлению узкого радиолокационного луча, который в данный момент отразился от объекта, можно определить пеленг или курсовой угол объекта. Измерив, промежуток времени между посылкой импульса и приемом отраженного сигнала, можно получить расстояние до объекта. Так как при работе РЛС антенна вращается, излучаемые импульсные колебания охватывают весь горизонт. Поэтому на экране индикатора судовой РЛС создается изображение окружающей судно обстановки. Центральная светящаяся точка на экране индикатора РЛС отмечает место судна, а идущая от этой точки светящаяся линия показывает курс судна.
Изображение различных объектов на экране радара может быть ориентировано относительно диаметральной плоскости судна (стабилизация по курсу) или относительно истинного меридиана (стабилизация по норду). Дальность «видимости» РЛС достигает несколько десятков миль и зависит от отражательной способности объектов и гидрометеорологических факторов.
Судовые РЛС позволяют за короткий промежуток времени определить курс и скорость встречного судна и избежать, таким образом, столкновения.
| Рис. Экран РЛС | Рис. Экран САРП |
Все суда должны обеспечивать радиолокационную прокладку на экране РЛС, для этого их оборудуют системой автоматической радиолокационной прокладки (САРП). САРП выполняет обработку радиолокационной информации и позволяет производить:
- ручной и автоматический захват целей и их сопровождение;
- отображение на экране индикатора векторов относительного или истинного перемещения целей;
- выделение опасно сближающихся целей;
- индикацию на табло параметров движения и элементов сближения целей;
- проигрывание маневра курсом и скоростью для безопасного расхождения;
- автоматизированное решение навигационных задач; отображение элементов содержания навигационных карт; определение координат местоположения судна на основе радиолокационных измерений.
Автоматическая информационная система (АИС) является морской навигационной системой, использующей взаимный обмен между судами, а также между судном и береговой службой для передачи информации о позывном и наименовании судна для его опознавания, координатах, сведений о судне (размеры, груз, осадка и др.) и его рейсе, параметрах движения (курс, скорость и др.) с целью решения задач по предупреждению столкновений судов, контроля за соблюдением режима плавания и мониторинга судов в море.
Электронные картографические навигационные информационные системы (ЭКНИС) являются эффективным средством навигации, существенно сокращающим нагрузку на вахтенного помощника и позволяющим уделять максимум времени наблюдению за окружающей обстановкой и выработке обоснованных решений по управлению судном.
Основные возможности и свойства ЭКНИС:
- проведение предварительной прокладки;
- проверка маршрута на безопасность; ведение исполнительной прокладки; автоматическое управление судном; отображение «опасной изобаты» и «опасной глубины»;
- запись информации в электронный журнал с возможностью дальнейшего проигрывания;
- ручная и автоматическая (через Internet) корректура;
- подача сигнала тревоги при приближении к заданной изобате или глубине; дневная, ночная, утренняя и сумеречная палитры;
- электронная линейка и неподвижные метки;
- базовая, стандартная и полная нагрузка дисплея;
- обширная и дополняемая база морских объектов; база приливов более чем в 3000 точек Мирового Океана.
Спутниковая система навигации ‑ это система, состоящая из наземного и космического оборудования, предназначенная для определения местоположения (географических координат), а также параметров движения (скорости и направления движения и т. д.) для наземных, водных и воздушных объектов.
 GPS ‑ это глобальная навигационная спутниковая система определения местоположения Global Position System. Система включает группировку низкоорбитальных навигационных спутников, наземные средства слежения и управления и самые разнообразные, служащие для определения координат. Принцип определения своего места на земной поверхности в глобальной системе позиционирования заключается в одновременном измерении расстояния до нескольких навигационных спутников (не менее трёх) — с известными параметрами их орбит на каждый момент времени, и вычислении по изменённым расстояниям своих координат.
GPS ‑ это глобальная навигационная спутниковая система определения местоположения Global Position System. Система включает группировку низкоорбитальных навигационных спутников, наземные средства слежения и управления и самые разнообразные, служащие для определения координат. Принцип определения своего места на земной поверхности в глобальной системе позиционирования заключается в одновременном измерении расстояния до нескольких навигационных спутников (не менее трёх) — с известными параметрами их орбит на каждый момент времени, и вычислении по изменённым расстояниям своих координат.
Рис. ЭКНИС Рис. Индикатор GPS
|
|
|
|
|
Дата добавления: 2014-12-25; Просмотров: 1475; Нарушение авторских прав?; Мы поможем в написании вашей работы!