КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Последовательность динамического синтеза механизма по коэффициенту неравномерности движения
|
|
|
|
При динамическом синтезе совместно выполняются расчетные и графические работы. Расчетная часть синтеза представляется в виде пояснительной записки, графическая часть выполняется на листе формата А1. На рис. 3 приведен пример выполнения графической части динамического синтеза механизма.
Синтез рекомендуется выполнять в следующем порядке.
1. В левой верхней части листа построить 12 равноотстоящих планов положений механизма для полного оборота его начального звена. За начальное принять кривошипное звено, связанное с входным или являющееся входным звеном механизма. На рис. 3 это кривошип АВ, у которого точка А – кинематическая пара, соединяющая кривошип со стойкой, а точка В – кинематическая пара, соединяющая кривошип с шатуном ВС. Число положений кривошипа при построении планов механизма в зависимости от точности расчета можно принимать в пределах 12...24. За начальное положение можно принимать любое, но лучше такое, которое соответствует крайним положениям входного (для машин-двигателей) или выходного (для технологических машин) звена механизма.
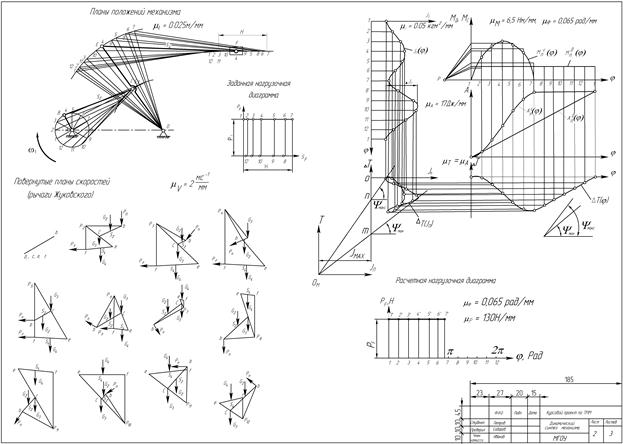
Рисунок 3 – Графическая часть раздела курсового проекта «Динамический синтез рычажного механизма по коэффициенту неравномерности движения»
Для построения планов механизма выбрать масштабный коэффициент длин, определяемый по формуле  , где lнз – действительная длина начального звена, заданная в метрах; lч – длина отрезка на чертеже в миллиметрах, изображающего начальное звено.
, где lнз – действительная длина начального звена, заданная в метрах; lч – длина отрезка на чертеже в миллиметрах, изображающего начальное звено.
2. Под планами механизма изобразить заданную нагрузочную диаграмму – индикаторную диаграмму сил движущих для машин-двигателей или диаграмму сил сопротивления для технологических машин. Выполнить обработку заданной диаграммы. При обработке перевести указанные на ней единицы измерения нагрузки в стандартные единицы силы (Ньютоны) или момента сил (Нм).
По полученным значениям с учетом выбранных масштабных коэффициентов начертить расчетную нагрузочную диаграмму механизма за цикл установившегося движения в зависимости от угла j поворота кривошипа. На расчетной диаграмме нанести точки, соответствующие нагружению звена в каждом положении механизма.
3. Под планами механизма для каждого его положения построить повернутые на 90 ° планы скоростей. Масштабный коэффициент скоростей определить по формуле  , где uВ – скорость точки В кривошипа, м/с; (pb) – отрезок, изображающий эту скорость на планах скоростей, мм; р – полюс плана скоростей. Длину отрезка (pb) следует принимать с таким расчетом, чтобы планы скоростей равномерно заполняли нижнюю площадь чертежа под планами механизма. На повернутых планах скоростей в сходственных точках с планами механизма без изменения направления приложить векторы заданных сил и сил веса звеньев, т.е. построить рычаги Жуковского.
, где uВ – скорость точки В кривошипа, м/с; (pb) – отрезок, изображающий эту скорость на планах скоростей, мм; р – полюс плана скоростей. Длину отрезка (pb) следует принимать с таким расчетом, чтобы планы скоростей равномерно заполняли нижнюю площадь чертежа под планами механизма. На повернутых планах скоростей в сходственных точках с планами механизма без изменения направления приложить векторы заданных сил и сил веса звеньев, т.е. построить рычаги Жуковского.
4. Для каждого положения механизма по формуле (16) определить приведенный момент инерции JП, подставляя w1 (угловую скорость звена приведения) вместо w. Отношения скоростей звеньев при расчете JП определяются с помощью планов скоростей. Составить таблицу значений приведенных моментов инерции.
5. Справа от планов механизма построить график JП(j) приведенного момента инерции в зависимости от угла поворота начального звена. При построении графика ось абсцисс φ направить вертикально вниз, ось ординат JП направить горизонтально вправо. Как будет показано в дальнейшем, в этом случае удобно строить диаграмму "энергия-масса" (диаграмму Виттенбауэра), на основании которой определяется искомый момент инерции маховика.
Для малых значений коэффициента неравномерности движения d при построении графика JП(j) может оказаться, что величина изменения переменной части приведенного момента инерции D JП (не путать с приведенным моментом J2П второй группы звеньев) на графике будет весьма мала по сравнению с полными значениями JП. В таком случае график "энергия-масса" DТ(JП) может быть слишком сужен по горизонтали, что может вызвать скученность точек при построении диаграммы "энергия-масса" и неточность при определении момента инерции маховика. Во избежание этого масштабный коэффициент m(J) графика JП(j) следует принимать таким, чтобы максимальное изменение величины переменной части приведенного момента инерции DJП на графике (см. рис. 3) за цикл установившегося движения составляло не менее 10 мм.
6. По методу Жуковского определить приведенную силу РП для каждого положения механизма и на повернутых планах скоростей приложить вектор этой силы в точке В перпендикулярно кривошипу в направлении, соответствующем расчету. Определить приведенный момент сил для каждого положения механизма по формуле  , где lАВ – действительная длина кривошипа АВ. Для машин-двигателей определяется приведенный момент сил движущих, для технологических машин – приведенный момент сил сопротивления. Составить таблицу значений приведенных моментов сил.
, где lАВ – действительная длина кривошипа АВ. Для машин-двигателей определяется приведенный момент сил движущих, для технологических машин – приведенный момент сил сопротивления. Составить таблицу значений приведенных моментов сил.
Приведенные моменты сил сопротивления для машин-двигателей и сил движущих для технологических машин принять постоянными и определить их из условия равенства работ сил движущих и сил сопротивления за цикл установившегося движения.
7. Справа от графика приведенного момента инерции Jп(j) построить графики приведенных моментов сил движущих  (j) (для машин-двигателей) или сил сопротивления
(j) (для машин-двигателей) или сил сопротивления  (j) (для технологических машин), определенных по методу Жуковского или другим способом.
(j) (для технологических машин), определенных по методу Жуковского или другим способом.
При построении графика приведенного момента сил сопротивления для технологических машин момент условно принимают положительным. При этом его направление противоположно направлению вращения кривошипа. В этом случае графики приведенных моментов сил сопротивления и сил движущих (см. рис. 3) в большинстве случаев располагаются выше оси абсцисс, что удобнее для выполнения последующих построений. Методом графического интегрирования определить и под графиком приведенного момента сил движущих (j) (для машин-двигателей) или сил сопротивления (j) (для технологических машин) построить графики работ  (j) и
(j) и  (j). По разнице работ определить и под графиками работ построить график DТ(j) изменения кинетической энергии за цикл установившегося движения.
(j). По разнице работ определить и под графиками работ построить график DТ(j) изменения кинетической энергии за цикл установившегося движения.
8. Построить диаграмму Виттенбауэра "энергия-масса" как функцию DТ(JП), используя графики приведенного момента инерции JП(j) и изменения кинетической энергии DТ(j) с исключением параметра j (угла поворота начального звена – кривошипа).
9. Определить момент инерции маховика по заданному коэффициенту неравномерности движения d. Для этого к диаграмме DТ(JП) "энергия-масса" с верхней и нижней ее стороны провести касательные под углами Yмакс и Yмин к оси абсцисс (оси JП), характеризующими максимальную wмакс и минимальную wмин угловые скорости звена приведения АВ в цикле установившегося движения. Точка пересечения касательных определяет положение нового начала координат ОМ диаграммы "энергия-масса" в системе координат ТОМJП, соответствующей механизму с установленным на валу звена приведения (кривошипном валу) маховиком. Момент инерции маховика Jмах определяется по расстоянию Jмах между осями ординат (осями Т и DТ) графика "энергия-масса" с маховиком и без маховика, умноженному на соответствующий масштабный коэффициент. При построении системы координат ТОМJП ее начало – точка ОМ пересечения касательных может выходить за пределы чертежа или попадать в область других графических построений. В этом случае момент инерции маховика определяется по отрезкам, отсекаемым касательными к диаграмме "энергия-масса" на осях ординат или абсцисс путем простого перерасчета, который будет показан ниже в примерах расчета момента инерции маховика для различных машин в разделе 7.
10. Выбрать конструкцию маховика и по величине рассчитанного момента инерции определить его геометрические размеры.
|
|
|
|
|
Дата добавления: 2014-12-26; Просмотров: 616; Нарушение авторских прав?; Мы поможем в написании вашей работы!