КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Автоматизация подземного рельсового танспорта
|
|
|
|
Транспортировка грузов по подземным шахтным выработкам может выполняться не только конвейерами, но и рельсовым транспортом с электровозной тягой. При этом системы автоматизации должны выполнять следующие задачи.
1. Обеспечивать автоматический пуск и разгон рудничного поезда без пробуксовки ведущих колес локомотива (электровоза).
2. Обеспечивать автоматическое регулирование скорости движения рудничного поезда в соответствии с профилем рельсового пути.
3. Обеспечивать автоматическое торможение рудничного поезда при подаче команды «стоп» при минимальной величине тормозного пути.
4. Обеспечивать безопасное движение рудничного поезда на опасных участках подземных рельсовых трассах.
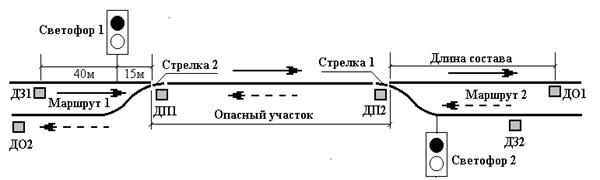 |
Опасными участками подземных рельсовых трасс считаются такие их участки, на которых происходит встречное движение составов по одной колее. Опасные участки оборудуются светофорами и аппаратурой автоматической блокировки и сигнализации. Схема расположения датчиков и аппаратуры световой сигнализации на опасном участке подземной рельсовой трассы показана на рис. 62.
Рис.62. Схема расположения датчиков и аппаратуры автоматической блокировки и сигнализации..
В эту схему введены следующие обозначения:
ДП – датчик положения;
ДЗ – датчик запроса;
ДО – датчик отбоя.
Опасный участок подземной рельсовой трассы, по которому наблюдается встречное движение шахтных поездов по одноколейному пути, оборудуется с обеих сторон стрелочными переводами, на каждом из которых устанавливается датчик положения ДП. Этот датчик фиксирует вход на стрелку опасного участка передней пары ходовых колес электровоза. За 15 метров от этих датчиков устанавливаются входные светофоры, которые одновременно загораются красным светом при срабатывании датчика положения ДП. Датчик запроса маршрута ДЗ устанавливается за 40 метров от входного светофора. При срабатывании этого датчика на свободном опасном участке подземной трассы переводятся все стрелки на выбранном маршруте. Датчик отбоя ДО устанавливается за выходной стрелкой выбранного маршрута на расстоянии длины рудничного поезда. Этот датчик срабатывает тогда, когда последняя вагонетка состава выйдет за пределы опасного участка. В этот момент ходовые колеса электровоза войдут в зону чувствительности этого датчика, и он сработает.
Все перечисленные датчики входят в состав аппаратуры автоматизации и световой сигнализации стрелочных переводов. Эта аппаратура должна удовлетворять определенным требованиям.
11.1. Требования к системам автоматической блокировки и световой сигнализации рельсового транспорта
Системы автоматической блокировки и световой сигнализации рельсового транспорта должны обеспечивать:
1. Автоматическое переключение зеленого сигнала светофора на красный при срабатывании датчика положения.
2. Автоматический перевод всех стрелок на выбранном маршруте при срабатывании датчика запроса, если выбранный маршрут свободен.
3. Автоматическое переключение нормально горящего красного сигнала светофора на мигающий красный при срабатывании датчика запроса.
4. Автоматическое включение мигающего зеленого сигнала светофора, если не все стрелки переведены на выбранном маршруте.
5. Автоматическое переключение красного сигнала светофора на зеленый при срабатывании датчика отбоя.
Все перечисленные требования реализуются в аппаратуре типа «АБСС-1» или «Нерпа».
11.2. Устройство и принцип работы аппаратуры АБСС-1
Аппаратура АБСС-1 автоматически управляет огнями светофоров и приводами стрелочных переводов. Структура этой аппаратуры показана на рис. 63. Эта аппаратура состоит из двух полукомплектов: передающего, который устанавливается на электровозе и приемного, который устанавливается на стрелочном переводе. Передающий полукомплект устанавливается на электровозе и через приемопередатчик включает датчики запроса ДЗ. Эти же датчики могут быть включены вручную непосредственно с места их расположения в приемном полукомплекте.
Приемный полукомплект состоит из устройства управления УУ, к которому непосредственно подключаются все группы датчиков. Этот блок управляет стрелками и огнями светофора в соответствии с выше изложенными требованиями через исполнительные механизмы ИМ. Выходные сигналы управления непосредственно воздействуют на исполнительные устройства ИМ,
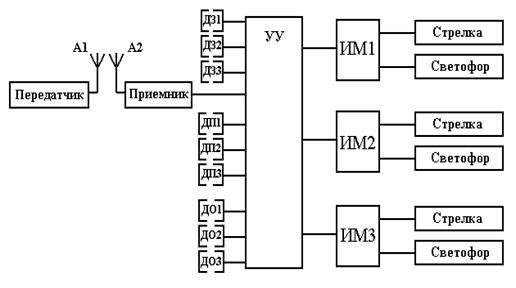 |
которые включают или выключают приводы стрелок и соответствующие огни светофоров.
Рис.63. Структурная схема аппаратуры АБСС-1.
11.3. Устройство и принцип работы аппаратуры «НЕРПА»
Аппаратура «НЕРПА» также как и аппаратура АБСС-1 автоматически управляет огнями светофоров и приводами стрелочных переводов. Кроме того, эта аппаратура предназначена для определения номера и направления движения электровоза по опасному участку. Структура этой аппаратуры показана на рис.64.
Аппаратура «НЕРПА» состоит из двух полукомплектов: передающего и приемного. Передающий полукомплект (рис. 64 а) устанавливается на электровозе. В состав передающего полукомплекта входят генераторы стабильной частоты, часть из которых (1,2,3,4,5) предназначена для кодирования номера электровоза. Всего предусмотрено 25 комбинаций для кодирования таких номеров. Остальные генераторы фиксированной частоты (6,7,8,9) предназначены для управления стрелками и огнями светофоров. Для кодирования конкретного номера электровоза включается постоянно конкретная комбинация из пяти генераторов, а для выбора определенного маршрута включается один из генераторов остального набора. Фиксированные частоты включенных генераторов этого типа подаются в смеситель. Смешанная частота затем подается на усилитель низкой частоты, и направляются в модулятор, где на смешенный спектр накладываются колебания высокой несущей частоты, возбуждаемых специальным генератором ВЧ. Этот процесс называется модуляцией колебаний. Модулированные колебания вновь усиливаются и направляются в антенну А, расположенную на электровозе, которая формирует волновой электромагнитный сигнал. Этот сигнал воспринимается антеннами приемного полукомплекта.
Приемный полукомплект (рис. 64 б) имеет две рамочные антенны А1 и А2, которые устанавливаются таким образом, чтобы сигнал с передающей антенны А электровоза последовательно достигал каждую из них при его движении.
Рис.64. Структурная схема аппаратуры «НЕРПА».
Сигнал с первой приемной антенны усиливается и направляется в демодулятор, который выделяет из его спектра только низкочастотные колебания. Эти колебания усиливаются по низкой частоте и направляются в полосовые фильтры (фильтр1, фильтр2, фильтр3, и т.д.). Так как низкочастотный сигнал представляет собой смесь колебаний различной частоты, то полосовые фильтры выделяют из этой смеси только колебания той частоты, на которую они настроены. Полосовые фильтры настраиваются на частоты генераторов 1-9 передающего полукомплекта. При наличии в смешенном спектре соответствующих гармоник колебаний этих генераторов фильтры активизируют соответствующие триггеры Т1-Т9, которые в свою очередь через логические ключи И при наличии управляющего импульса включают необходимые управляющие реле К1-К9.
Сигналы с первой и второй приемной антенны одновременно подаются через усилители ВЧ1 и ВЧ2 на блок логики, который формирует сигналы управления логическими ключами И и сигналами обнуления триггеров. Кроме того, блок логики формирует сигнал Y, определяющий направление движения электровоза по опасному участку трассы.
Принцип формирования этого сигнала показан на схеме рис.64 в. Параметры Х1 и Х2 это сигналы поступающие на блок логики через усилители с приемных антенн А1 и А2. Так как эти сигналы не одновременно поступают на приемные антенны, то при одном направлении движения электровоза вначале сигнал поступает на антенну А1, при этом параметр Х1 становится единичным, а параметр Х2 остаетсянулевым. Однако на вход логического ключа И этот параметр подается в инвертированном виде поэтому в этом случае на выходе блока логики параметр Y будет единичным. При обратном движении электровоза этот параметр равен нулю. Таким образом, по величине параметра Y система различает направление движения электровоза.
12. АВТОМАТИЗАЦИ ШАХТНОГО ПОДЪЕМА
Транспортировка полезного ископаемого из забоя по подземным шахтным выработкам к рудничному стволу выполняться конвейерным и рельсовым транспортом до подземного шахтного бункера. После чего на «дневную» поверхность оно доставляется шахтным подъемом.
Шахтные подъемные установки бывают двух типов:
· Клетьевые;
· Скиповые.
Клетьевые подъемные установки применяются для спуска-подъема людей и грузов, в то время как скиповые подъемные установки используются только для подъема полезного ископаемого на «дневную» поверхность. Команду для пуска клетьевой подъемной установки дает машинист этой установки, после чего процесс подъема клети производится в автоматическом режиме. Автоматика останавливает клеть на выбранном «горизонте».
Скиповые подъемные установки работают только в автоматическом режиме, хотя присутствие машиниста в этом случае не исключается. Машинист скиповой подъемной установки вступает в процесс управления в аварийной ситуации. В этом случае он режиме ручного управления выводит эту установку из аварийной ситуации.
Основные технологические элементы шахтной, скиповой подъемной установки показаны на рис.65.
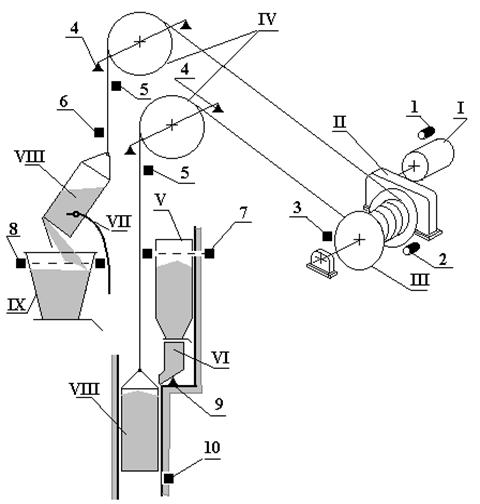 |
Рис.65. Схема установки датчиков в шахтной скиповой подъемной установке.
На этом рисунке представлены следующие элементы этой скиповой установки:
I – двигатель подъема;
II – редуктор;
III – барабан;
IV – копровые блоки;
V – подземный бункер для полезного ископаемого;
VI – весовой дозатор подземного бункера;
VII – разгрузочные кривые;
VIII – процесс разгрузки скипа;
IХ – поверхностный бункер для полезного ископаемого.
Транспортировка полезного ископаемого в этой установке производится в подъемном сосуде VIII, который называют скипом. Скип подвешен на подъемном канате, который наматывается на барабан III. Вращение барабана осуществляется от подъемного двигателя I через редуктор II. Подъемный канат от барабана к скипу проходит через отклоняющие (копровые) блоки IV. Полезное ископаемое из подземного бункера V автоматически загружается в скип через дозатор VI. На дневной поверхности разгрузка скипа в поверхностный бункер IХ производится автоматически через донный люк скипа, при том донная часть скипа перемещается к поверхностному бункеру разгрузочными кривыми VII.
Для обеспечения автоматического режима работы шахтной скиповой подъемной установки она оснащается следующими основными видами датчиков:
1 – тахогенератор двигателя подъема;
2 – тахогенератор барабана;
3 – датчик предельного износа колодок тормоза;
4 – датчик контроля напуска каната;
5 – датчик контроля пере подъема скипа;
6 – датчик входа скипа в разгрузочные кривые;
7 – датчик уровня полезного ископаемого в поземном бункере;
8 – датчик уровня полезного ископаемого в поверхностном бункере;
9 – датчик весовой загрузки дозатора;
10 – датчик положения скипа при загрузке.
12.1. Требования к системам автоматизации шахтного подъема.
Трбования к системам автоматизации шахтных подъемных установок делятся на три группы:
· Обеспечение точного расчетного движения подъемных сосудов в соответствии с тахограммой их движения в шахтном стволе.
· Защита подъемной машины включением предохранительного торможения.
· Блокировка пуска подъемной машины.
В рамках обеспечения точного расчетного движения подъемного сосуда в шахтном стволе должны выполнятся следующие требования:
1. Скорость подхода клети к приемной площадке и скорость выхода скипа из разгрузочных кривых не должна превышать 1 м/сек.
2. Скорость перемещения груженого скипа в разгрузочных кривых не должна превышать 0,6 м/сек.
Защита подъемной машины включением предохранительного торможения должна выполнятся следующих случая:
1. При пере подъеме сосуда на 0,5 м. выше уровня приемной площадки.
2. При превышении на 15%. номинальной скорости подъема.
2. При подходе сосуда к приемной площадке со скоростью выше чем 1,5м/сек при спуске-поъеме груза и более 1 м/сек при спуске-подъеме людей.
3. При провисании или напуске струны каната.
4. При зависании сосуда в любом месте ствола.
5. При недопустимом износе тормозных колодок.
6. При снижении давления в цилиндрах предохранительного тормоза и сети питания тормозной системы.
7. При исчезновении напряжения в цепях управления.
8. При повреждении электронных ограничителей скорости.
Системы автоматизации шахтных подъемных установок должны обеспечивать блокировку запрещающую:
1. Включение подъемной машины после пере подъема или зависания сосуда в сторону увеличения пере подъема или напуска каната.
2. Снятие предохранительного тормоза, если рукоятка рабочего тормоза не поставлена в положение «заторможено», а рукоятка управления приводом подъемной машины не поставлена в нулевое положение.
3. Работу подъема при открытом положении предохранительных решеток на приемных площадках.
12.2. Принцип автоматического задания и контроля основных параметров работы шахтного подъема.
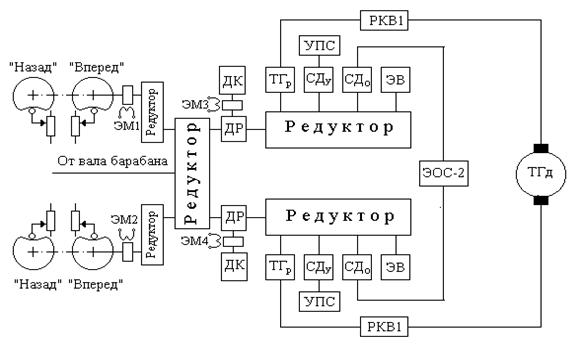 |
Для задания и контроля точного расчетного движения подъемного сосуда в шахтном стволе применяется аппаратура АЗК-1, структурная схема которой показана на рис.66.
Рис 66. Схема аппарата задания и контроля (АЗК-1).
Аппарат состоит из системы редукторов, которые имеют общий привод от вала барабана. Функциональные возможности системы автоматического задания и контроля основных параметров шахтного построены в зависимости от длины каната, именно поэтому аппарат АЗК-1 кинематически связан с барабаном.
Программно скорость движения подъемного сосуда задается профильными (ретрадирующими) дисками, которые приводятся во вращение отдельными редукторами. Программа движения подъемного сосуда сразу записана на два таких диска, Но при считывании они вращаются в разные стороны («Вперед» и «Назад»). Это объясняется тем, что при реверсе барабана реверсируется и вращение программного диска, при этом программа, записанная только на одном диске, будет считываться в обратном порядке. Для того чтобы этого не произошло, эта программа реверсивно записывается на два диска, с каждого из которых она считывается при определенном вращении барабана.
Кроме того, парные диски сдвоены. На одной из пар этих дисков задается скоростная программа рабочего режима, а на другой паре записан скоростной режим «ревизии ствола», которому ежесуточно подвергается шахтная подъемная установка и все сопутствующие оборудование. Включение пары этих дисков происходит с помощью электромагнитной муфты ЭМ1 или ЭМ2.
Настройка системы по длине каната (по пути перемещения подъемного сосуда) происходит от двигателя коррекции ДК через дифференциальный редуктор ДР. Эта настройка необходима после очередного ежегодной подстройки длины подъемного каната, которая происходит после обрубки его мерного куска для проверки прочности на разрыв. После этой обрубки длину каната восстанавливают за счет смотки с барабана запасных витков. Все это требует маневровых операций, которые выполняются двигателями коррекции. Включение этих двигателей производится через электромагнитные муфты ЭМ3 и ЭМ4.
Для повышения надежности контролирующие функции этого аппарата выполнены в дублированном варианте. Аппаратура, реализующая эти функции, кинематически через дифференциальный ДР ираздаточный редуктор связана с подъемным бараном. Раздаточный редуктор одновременно приводит в действие тахогенератор ТГр, два сельсина датчика СДу и СДо, а также этажный выключатель ЭВ.
Тахогенератор ТГр совместно с тахогенератором подъемного двигателя ТГд подключены на вход реле РКВ1, контролирующего целостность кинематической цепи подъемной установки и аппарата АЗК1. В случае потери этой целостности (поломка шестерни, муфты или вала редуктора подъемной машины) реле РКВ1 будет получать разные сигналы с тахогенераторов ТГр и ТГд. В результате этого оно разомкнется и своими нормально закрытыми контактами включит привод аварийного тормоза.
Сельсин датчик Сду приводит в действие указатель положения подъемного сосуда УПС (клети или скипа). Этот указатель непрерывно показывает машинисту подъемной машины положение подъемного сосуда в стволе шахты, в то время как другой указатель ЭВ показывает положение клети только на конкретном горизонте «этаже» шахты.
Сельсин датчик Сдо приводит в действие программные (ретродирующие) диски аппарата задания скорости в устройстве ЭОС2.
12.3. Принцип автоматического включения предохранительного и рабочего торможения при защите подъемной машины
Автоматическое включение предохранительного торможения должно происходить в случаях, описанных выше приведенными требованиями. В частности это должно произойти, если скорость движения подъемного сосуда будет отличаться в обе стороны на 15% от заданного значения. Для контроля такой ситуации В аппарате АЗК-1 используют электронный ограничитель скорости ЭОС2. Электрическая схема этого устройства показана на рис.67.
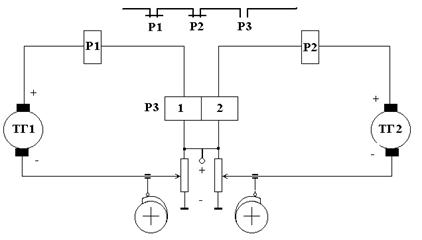 |
Рис. 67. Схема электронного ограничителя скорости ЭОС2.
Принципиально электронный ограничитель скорости состоит из двух датчиков скорости (тахогенераторов ТГ1 и ТГ2), двух задатчиков скорости (потенцитметров, движки которых перемещаются профильными дисками). Скорость вращения этих дисков задается сельсинами датчиками Сдо аппарата АЗК1. В состав Э ОС2 входят катушки двух реле Р1 и Р2. Каждое из этих реле запитаны от двух источников: соответствующего тахогенератора задающего потенциометра. Причем эти источники напряжения включены встречно, поэтому пока фактическая скорость движения подъемного сосуда не отклоняется от заданной величины более чем на 15% реле Р1 и Р2 находятся в отключенном состоянии. Если же это условие нарушается, то одно из реле срабатывают и своими контактами разрывает цепь питания двигателя подъема, после чего двигатель отключается и одновременно включается предохранительный тормоз.
Тот же эффект наступает в случае разрыва хотя бы одной из цепей питания катушек реле Р1 или Р2, которые предназначены ля контроля целостности цепей питания ограничителя скорости. В этом случае обесточится хотя бы одна из катушек двухкатушечного реле Р3, его контакты так же разомкнут цепь питания двигателя подъема и замкнут цепь питания предохранительного тормоза.
Тормозная система играет значительную роль в технологическом процессе работы шахтного подъема. Потому системы автоматизации этого подъема должны учитывать особенности работы этого устройства. Основной особенностью этого устройства является то, что тормозная система шахтной подъемной машины работает в двух режимах: рабочем и аварийном.
Структурная схема привязки тормозной системы шахтной подъемной машины к системе автоматизации показана на рис. 68.
Барабан тормоза 1 подъемной машины ТПМ одновременно связан с барабаном этой машины и тахогенератором ТГ, замеряющим скорость подъема. Тормозной момент на барабане 1 создается за счет прижатия тормозных колодок 2 усилием груза 4, воздействующего на эти колодки через рычажную систему 3.
Рис. 68. Схема тормозной системы шахтной подъемной машины
Величина этого усилия может регулироваться встречным усилием гидроцилиндров ЦРТ и ЦАТ. Величина усилия этих гидроцилиндров зависит от величины давления рабочей жидкости, подаваемого через гидроусилитель 6.
Принцип автоматического поддержания рабочего тормозного момента следующий. Последовательность изменения тормозного момента по пути перемещения подъемно сосуда программно записана на ретродирующем диске РД. Этот диск, кинематически через АЗК-1 связанный с барабаном подъемной машины, перемещает движок потенциометра задатчика тормозного усилия ЗУ.
Выпрямительный мост этой системы выполнят роль элемента сравнения, сравнивая заданное значение тормозного усилия с фактической скоростью движения сосуда. В случае рассогласования этих параметров на выходе этого моста появляется сигнал, который подается на катушку КРТ рабочего тормоза. Это катушка создает магнитны поток, с помощью которого якорь электромагнита изменяет зазор клапана 5 регулятора РД давления рабочей жидкости. Величина этого сигнала корректируется потенциометром обратной связи ПОС, учитывающего степень износа тормозных колодок 2.
Регулятор давления рабочей жидкости состоит из рабочего цилиндра 6, в котором помещен золотник 7. Этот золотник пружиной 8 прижимается к верхнему торцу рабочего цилиндра регулятора. В этом положении кольцевая проточка золотника совмещает рабочие каналы цилиндров ЦРТ и ЦАТ с линией слива рабочей жидкости. Поэтому в этом положениизолотника давление в этих цилиндрах отсутствует, в результате чего на тормозные колодки воздействует максимальная величина усилия Q. Такой режим соответствует аварийному режиму тормозной системы.
В случае максимального зазора клапана 5 в регуляторе РД золотник 7 перемещается в нижнее положение, сжимая пружину 8. При этом рабочие каналы цилиндров ЦРТ и ЦАТ совмещаются слинией подачи рабочего давления, в результате чего воздействие усилия Q на тормозные колодки снимается, и система полностью растормаживается.
Регуляторадавления РД программно может быть переведен в режим регулирования тормозного усилия, при котором за счет изменения зазора клапана 5 меняется величина разгрузки усилия Q, а следовательно меняется величина тормозного момента.
При подходе груженого скипа к разгрузочным кривым возникает необходимость в регулировании скорости этого подхода. Эта скорость может регулироваться как за счет свободного выбега грузоподъемной системы, так и за счет включения режима рабочего торможения. Сигнал для начала регулирования этой скорости формируется датчиком входа скипа в разгрузочные кривые. Этот датчик дискретного типа представляет собой нормально замкнутый контакт, который размыкается при его срабатывании. Структурная схема устройства автоматического включения регулятора скорости входа скипа в разгрузочные кривые показана на рис.69.
Рис. 69. Схема устройства автоматического включения регулятора скорости
входа скипа в разгрузочные кривые.
Это устройство предназначено для автоматической выдержки времени выключения привода подъемной машины поле срабатывания датчика входа скипа в разгрузочные кривые. Дело в том, то при различной загрузке скипа (реально она не постоянна) замедление скипа при свободном выбеге зависит от степени его загрузки. Чем больше эта загрузка тем меньше времени необходимо для его свободного выбега при подходе к разгрузочным кривым.
Устройство работает следующим образом. На блок пропорциональности нагрузки БПН подаются сигналы с трансформаторов тока ТТ1 и ТТ2 о токовой загрузке двигателя подъемной машины. Величина этого тока пропорциональна загрузке скипа. С выхода блока БПН сигнал подается на вход блока выдержки времени БВВ, с помощью которого формируется временная задержка выключения двигателя подъемной машины. На входе этого блока сигнал усиливается магнитным усилителем МУ и через нормально замкнутый контакт К1 датчика входа скипа в разгрузочные кривые подается на катушку К2, параллельно которой подключен конденсатор С. Степень зарядки этого конденсатора зависит от величины сигнала, формируемого на блоке БПН, а это значит от степени загрузки скипа. Поэтому, когда сработает датчик входа скипа в разгрузочные кривые контакт К1 разомкнется, но катушка К2 при этом будет питаться напряжением зарядки конденсатора С до тех пор пока конденсатор полностью не разрядится. Таким образом, блок выдержки времени удерживает в замкнутом состоянии контакт пускового реле К2, который через блок управления БУ включает пусковой контактор КМ двигателя подъемной машины. Только по истечении времени разрядки конденсатора С контакт пускового реле К2 разомкнет цепь питания контактора КМ, в результате чего двигатель подъемной машины обесточится и скип будет к разгрузочным кривым со скоростью свободного выбега.
Сигнал с блока пропорциональности нагрузки может быть подан на катушку КРТ регуляторадавления РД устройства управления режимом рабочего тормоза. В этом случае степень загрузки скипа атоматчески будет определять величину тормозного момента в рабочего тормоза.
13. АВТОМАТИЗАЦИЯ ШАХТНОГО ВОДООТЛИВА
Шахтные водоотливные установки предназначены для откачки на дневную поверхность воды, которая просачивается в шахтные выработки из вышележащих, естественных водонесущих породных пластов. Подземные шахтные выработки проходятся с небольшим уклоном вверх от ствола, с таким расчетом, чтобы шахтные воды по специальным штрековым канавам всегда стекали бы к стволу. В нижней части шахтного ствола помещается водосборник, емкость которого выбирается из расчета максимального суточного водопритока. Шахтные водоотливные установки должны откачать этот водоприток за три часа своей непрерывной работы в ночное время, когда тариф на электроэнергию минимален.
13.1.Требования к системам автоматизации шахтного водоотлива
Аппаратура автоматизации шахтного водоотлива должна обеспечивать:
1. Автоматическую контролируемую заливку насосов перед запуском их в работу;
2. Автоматическое включение в работу очередного насоса при достижении верхнего уровня воды в водосборнике и непрерывную его работу до тех пор, пока уровень воды в водосборнике не снизится до нижней отметки;
3. Автоматический контроль за работающим насосом и аварийное его отключение, в случае если он не достиг заданной производительности или при возникновении отказа в его работе (перегрев подшипников, короткое замыкание в приводе и т.д.);
4. Автоматическое включение в работу резервного насоса при отказе в работе основного насоса или при недостаточной его производительности (когда уровень воды в водосборнике растет и достигает повышенной или аварийной отметки);
5. Подачу звуковой и световой сигнализации на пульт диспетчера и машинное отделение о состоянии работы установки, аварийном уровне воды и отказах в работе насосов;
6. Дистанционное включение насосной установки с пульта диспетчера и перевод его на ручное управление из машинного зала;
7. Блокировку от повторного включения отказавшего насоса с пульта диспетчера;
8. Автоматическое управление работой задвижек на трубопроводах.
13.2. Схема установки датчиков в автоматической системе шахтного водоотлива.
Для автоматического управления системой шахтного водоотлива он оборудуется многочисленными датчиками. Структурная схема водоотливной установки и расположения в ней датчиков показана на рис.70.
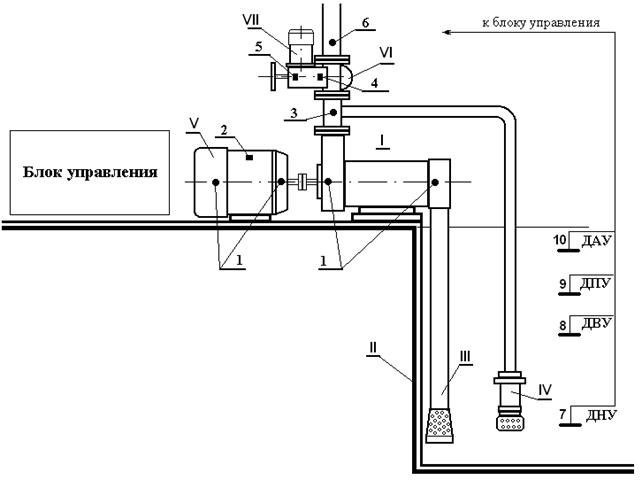
Рис.70. Схема установки датчиков в системе шахтного водоотлива.
Шахтная водоотливная установка структурно состоит из многоступенчатого центробежного насоса I с приводом от электродвигателя V. Насосная установка расположена вблизи водосборника II, в котором помещено всасывающее устройство III и заливочный насос IV. С помощью этого насоса создается первоначальное давление в напорной магистрали водоотливной установки. Напорный трубопровод соединен с насосом через задвижку VI, оснащенную электроприводом VII.
Для обеспечения автоматического режима работы шахтной водоотливной установки она оснащается следующими типами датчиков:
1 – датчики температуры подшипников;
2 – датчик температуры обмотки двигателя;
3 – датчик давления воды;
4 – датчик положения задвижки «закрыто»;
5 – датчик положения задвижки «открыто»;
6 – датчик производительности насос;
7 – датчик нижнего уровня воды (ДНУ);
8 – датчик верхнего уровня воды (ДВУ);
9 – датчик повышенного уровня воды (ДПУ);
10 – датчик аварийного уровня воды (ДАУ).
Для автоматизации шахтного водоотлива используется серийная аппаратура аналогового типа. На шахтах чаще всего используется аппаратура следующих типов: ВАВ, УАВ и АВН-1М. Эти аппаратные средства шахтного водоотлива изготовляются различными производителями, но имеют примерно одинаковое устройство. Принцип работы этой аппаратуры рассмотрим на примере аппаратуры типа УАВ
13.3. Структура и принцип работы
Аппаратура УАВ имеет модульную структуру и служит для автоматического управления насосами шахтной водоотливной установки. В этой установке есть модули основного и резервного насосов., Эта аппаратура может комплектоваться модулями насосов повышенного и аварийного уровней. Структура аппаратуры УАВ показана на рис. 71.
Каждый из модулей этой аппаратуры запускается соответствующим датчиком уровня воды в водосборнике. Так датчик верхнего уровня ДВУ включает модуль основного насоса через пусковое реле верхнего уровня РУВ, которое в свою очередь включает реле повторения уровня РПУ. Таким образом, происходит запуск этого и аналогичных модулей этой аппаратуры.
Реле РПУ включает пускатель заливочного насоса IV и одновременно реле времени РВ. Заливочный насос работает до тех пор, пока давление воды в рабочей полости главного насоса не достигнет заданного уровня, или пока не сработает через заданный промежуток времени реле времени на его отключение. После срабатывания датчика давления реле главного насоса РГН включает двигатель V этого насоса, после его некоторое время оба насоса работают одновременно. После выключения через заданный промежуток времени с помощью реле времени заливочного насоса, реле РГН включает привод задвижки VII на ее открытие. Выключение этого привода происходит по сигналу датчика открытия задвижки. После отключения привода задвижки работает только привод главного насоса. Работа насоса в этом режиме происходит до тех пор, пока не сработает датчик нижнего уровня ДНУ воды в водосборнике
 |
Рис.71. Структурная схема аппаратуры УАВ.
При срабатывании этого датчика включается реле РНУ, которое включает привод задвижки на закрытие и запускает реле времени РВ. После того как сработает датчик «задвижка закрыта» реле времени через заданное время отключает реле РГН и привод главного насоса останавливается.
При работе главного насоса производится контроль температуры подшипников и рабочей обмотки приводного двигателя насоса. В случае превышения заданного уровня этой температуры срабатывает реле защиты РЗ, которое производит отключение главного насоса в той же последовательности.
13.4. Схема установки датчиков в автоматической системе шахтного водоотлива.
|
|
|
|
|
Дата добавления: 2014-12-26; Просмотров: 5412; Нарушение авторских прав?; Мы поможем в написании вашей работы!