КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Частота вращения ротора асинхронного двигателя
|
|
|
|
Регулирование частоты вращения асинхронных двигателей
n2 =n1(1 - s) = (f160/ p)(l - s). (15.2)
Из этого выражения следует, что частоту вращения ротора асинхронного двигателя можно регулировать изменением какой - либо из трех величин: скольжения s, частоты тока в обмотке статора f 1 или числа полюсов в обмотке статора 2р.
Регулирование частоты вращения изменением скольжения sвозможно тремя способами: изменением подводимого к обмотке статора напряжения, нарушением симметрии этого напряжения и изменением активного сопротивления обмотки ротора.
Регулировка частоты вращения изменением скольжения происходит только в нагруженном двигателе. В режиме холостого хода скольжение, а следовательно, и частота вращения остаются практически неизменными.
Регулирование частоты вращения изменением подводимого напряжения. Возможность этого способа регулирования подтверждается графиками М = f (s), построенными для разных значений U1 (см. рис. 13.5). При неизменной нагрузке на валу двигателя увеличение подводимого к двигателю напряжения вызывает рост частоты вращения. Однако диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя, ограниченным значением критического скольжения и недопустимостью значительного превышения номинального значения напряжения. Последнее объясняется тем, что с превышением номинального напряжения возникает опасность чрезмерного перегрева двигателя, вызванного резким увеличением электрических и магнитных потерь. В то же время с уменьшением напряжения U1двигатель утрачивает перегрузочную способность, которая, как известно, пропорциональна квадрату напряжения сети (см. § 13.2).
Подводимое к двигателю напряжение изменяют либо регулировочным автотрансформатором, либо реакторами, включаемыми в разрыв линейных проводов.
Узкий диапазон регулирования и неэкономичность (необходимость в дополнительных устройствах) ограничивают область применения этого способа регулирования частоты вращения.
Регулирование частоты вращения нарушением симметрии подводимого напряжения. При нарушении симметрии подводимой к двигателю трехфазной системы напряжения вращающееся поле статора становится эллиптическим (см. § 9.4). При этом поле приобретает обратную составляющую (встречное поле), которая создает момент Мобр, направленный встречно вращающему моменту Мпр. В итоге результирующий электромагнитный момент двигателя уменьшается (М = Мпр - Мобр).
Механические характеристики двигателя при этом способе регулирования располагаются в зоне между характеристикой при симметричном напряжении (рис. 15.10, а, кривая 1) и характеристикой при однофазном питании двигателя (кривая 2) — пределом несимметрии трехфазного напряжения.
Для регулировки несимметрии подводимого напряжения можно в цепь одной из фаз включить однофазный регулировочный автотрансформатор (AT) (рис. 15.10, б). При уменьшении напряжения па выходе AT несимметрия увеличивается и частота вращения ротора уменьшается. Недостатками этого способа регулирования являются узкая зона
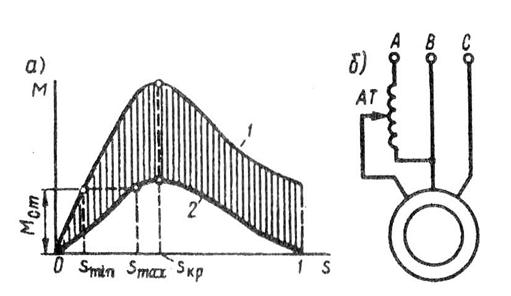
Рис. 15.10. Механические характеристики (а) и схема включения (б) асинхронного двигателя при регулировании частоты вращения изменением симметрии трехфазной системы
регулирования и уменьшение КПД двигателя по мере увеличения несимметрии напряжения. Обычно этот способ регулирования частоты вращения применяют лишь в двигателях малой мощности.
Регулирование частоты вращения изменением активного сопротивления в цепи ротора. Этот способ регулирования частоты вращения возможен лишь в двигателях с фазным ротором. Механические характеристики асинхронного двигателя, построенные для различных значений активного сопротивления цепи ротора (см. рис. 13.6), показывают, что с увеличением активного сопротивления ротора возрастает скольжение, соответствующее заданному нагрузочному моменту. Частота вращения двигателя при этом уменьшается. Зависимость скольжения (частоты вращения) от активного сопротивления цепи ротора выражается формулой, полученной преобразованием (13.13):
s = m1I/22 r'2/ (ω1 М). (15.3)
Практически изменение активного сопротивления цепи ротора достигается включением в цепь ротора регулировочного реостата (РР), подобного пусковому реостату (ПР) (см. рис. 15.2), но рассчитанного на длительный режим работы. Электрические потери в роторе пропорциональны скольжению (Рэ2 = sPэм), поэтому уменьшение частоты вращения (увеличение скольжения) сопровождается ростом электрических потерь в цепи ротора и снижением КПД двигателя. Так, если при неизменном нагрузочном моменте на валу двигателя увеличить скольжение от 0,02 до 0,5, что соответствует уменьшению частоты вращения примерно вдвое, то потери в цепи ротора составят почти половину электромагнитной мощности двигателя. Это свидетельствует о неэкономичности рассматриваемого способа регулирования. К тому же необходимо иметь в виду, что рост потерь в роторе сопровождается ухудшением условий вентиляции из-за снижения частоты вращения, что приводит к перегреву двигателя (см. § 31.1).
Рассматриваемый способ регулирования имеет еще и тот недостаток, что участок механической характеристики, соответствующий устойчивой работе двигателя, при введении в цепь ротора добавочного сопротивления становится более пологим и колебания нагрузочного момента на валу двигателя сопровождаются значительными изменениями частоты вращения ротора. Это иллюстрирует рис. 15.11, на котором видно, что если нагрузочный момент двигателя изменится на ΔМст = М/ст – М//ст, то изменение частоты
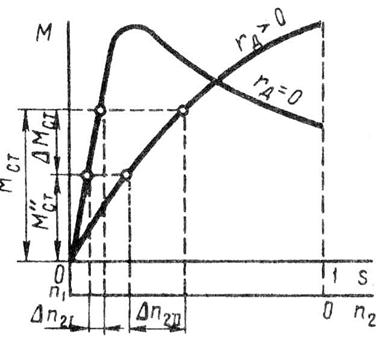
Рис. 15.11. Влияние сопротивления цепи ротора на
колебания частоты вращения при изменении нагрузки
вращения при выведенном регулировочном реостате (rд' = 0) составит Δn2I, а при введенном реостате - Δn2II. В последнем случае изменение частоты вращения значительно больше.
Но несмотря на указанные недостатки, рассмотренный способ регулирования частоты вращения широко применяется в асинхронных двигателях с фазным ротором. В зависимости от конструкции регулировочного реостата этот способ регулирования частоты вращения может быть плавным (при плавном изменении сопротивления РР) или ступенчатым (при ступенчатом изменении сопротивления РР).
Способ обеспечивает регулирование частоты вращения в широком диапазоне, но только вниз от синхронной частоты вращения. Вместе с тем он обеспечивает двигателю улучшенные пусковые свойства (см. § 15.1).
Регулирование частоты вращения изменением частоты тока в статоре. Этот способ регулирования (частотное регулирование) основан на изменении синхронной частоты вращения n1 = f 1 60/ р.
Для осуществления этого способа регулирования необходим источник питания двигателя переменным током с регулируемой частотой. В качестве таких источников могут применяться электромашинные, ионные или полупроводниковые преобразователи частоты (ПЧ). Чтобы регулировать частоту вращения, достаточно изменить частоту тока f 1. Но с изменением частоты f 1 = ω1p/ (2π) будет изменяться и максимальный момент [см. (13.18)]. Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f 1 изменять и напряжение питания U1. Характер одновременного изменения f1 и U1 зависит от закона изменения момента нагрузки и определяется уравнением
U/1 /U1 = (f1 //f1)  (15.4)
(15.4)
где U1 и М — напряжение и момент при частоте f1; U'1 и М' -напряжение и момент при частоте f '1.
Если частота вращения двигателя регулируется при условии постоянства момента нагрузки (М = М' = const), то подводимое к двигателю напряжение необходимо изменять пропорционально изменению частоты тока:
U'1 = U1 f '1/f1 (15.5)
При этом мощность двигателя увеличивается пропорционально нарастанию частоты вращения. Если же регулирование производится при условии постоянства мощности двигателя (Рэм = Мω1 = const), то подводимое напряжение следует изменять в соответствии с законом
U'1 = U1  . (15.6)
. (15.6)
Частотное регулирование двигателей позволяет плавно изменять частоту вращения в широком диапазоне (до 12:1). Однако источники питания с регулируемой частотой тока удорожают установку. Поэтому частотное регулирование до последнего времени применялось в основном для одновременного регулирования группы двигателей, работающих в одинаковых условиях (например, рольганговых двигателей). Но благодаря развитию силовой полупроводниковой техники в последние годы созданы устройства частотного регулирования, технико-экономические показатели которых оправдывают их индивидуальное применение для регулирования частоты вращения одиночных двигателей.
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 9815; Нарушение авторских прав?; Мы поможем в написании вашей работы!