КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Асинхронный преобразователь частоты
|
|
|
|
Как известно, частота тока в роторе асинхронной машины зависит от скольжения (f 2 = s f 1).Это свойстве асинхронных машин и. пользуется в асинхронных преобразователях частоты (АПЧ).
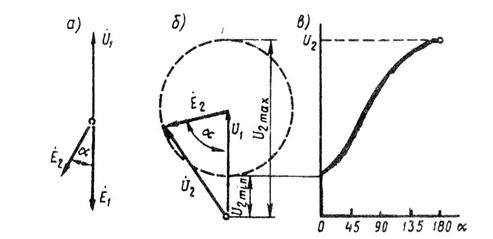
Рис. 17.2. Векторные диаграммы
индукционного регулятора напряжения
Обмотку статора АПЧ подключают к трехфазной сети с частотой f 1, а ротор приводят во вращение приводным двигателем (ПД) в направлении против вращения поля статора (рис. 17.3). В этом случае в обмотке ротора наводится ЭДС Е2 частотой f 2 >f 1, так как скольжение s >1. Указанная ЭДС через контактные кольца и щетки создает на выходе АПЧ напряжение. Если требуется получить на выходе АПЧ напряжение частотой f 2 < f 1, то ротор
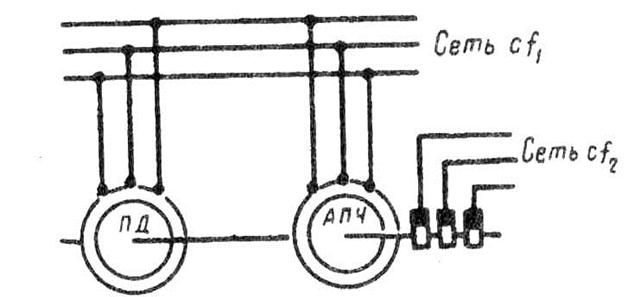
Рис. 17.3. Схема включения асинхронного
преобразователя частоты
вращают в направлении вращения поля статора с частотой вращения n2 < n1(при этом s <1).
Мощность на выходе АПЧ складывается из электромагнитной мощности Рэм,
передаваемой в обмотку ротора вращающимся полем статора, и механической мощности приводного двигателя Рпд, т. е. Р2 = Рэм + Рпд. Соотношение между мощностями Рэм и Рпдзависит oт скольжения. Так, при работе АПЧ со скольжением s = 2эти мощности равны и ротор половину мощности получает от статора, а половину — от приводного двигателя. При необходимости плавной регулировки частоты на выходе АПЧ в качестве приводного двигателя применяют электродвигатель с плавной регулировкой частоты вращения, например двигатель постоянного тока (см. гл. 29) Однако чаще всего АПЧ используют для получения определенной частоты тока f 2 и в качестве приводного применяют асинхронный или синхронный (см. гл. 22) двигатель.
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 1273; Нарушение авторских прав?; Мы поможем в написании вашей работы!