КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Линейные асинхронные двигатели
|
|
|
|
Подвижная часть линейного двигателя совершает поступательное движение, поэтому применение этих двигателей для привода рабочих машин с поступательным движением рабочего органа позволяет упростить кинематику механизмов, уменьшим потери в передачах и повысить надежность механизма в целом.
Возможны линейные двигатели четырех видов: электромагнитные (соленоидные), магнитоэлектрические (с применением постоянного магнита), электродинамические и асинхронных. Асинхронные (индукционные) линейные двигатели благодаря простоте конструкции и высокой надежности получили наибольшее применение.
Для объяснения принципа работы линейного асинхронного двигателя обратимся к асинхронному двигателю с вращательным движением ротора. Если статор этого двигателя (рис. 17.10, а) мысленно «разрезать» и «развернуть» так, чтобы он образовал дугу с углом α (рис. 17.10, б), то диаметр ротора увеличится. При этом мы получим асинхронный двигатель с дуговым статором Частота вращения (об/мин) магнитного поля статора этого двигателя (синхронная частота)
n1 = n01 α /(2π) (17.6)
где n01 — синхронная частота вращения обычного (до «разрезания») асинхронного двигателя, об/мин; α — угол дуги статора, рад.
Из (17.6) следует, что, изменяя угол α, можно получить дуговой асинхронный двигатель на любую синхронную частоту меньше частоты вращения n01. Дуговые двигатели применяют для безредукторного привода устройств, требующих небольших частот вращения, исключив применение сложного и трудоемкого редуктора.
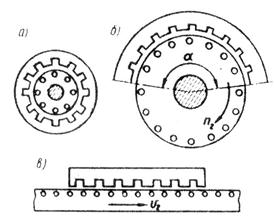
Рис. 17.10. К понятиям о дуговом и линейном двигателях
Если же «разрезанный» статор развернуть в плоскость, то получим асинхронный линейный двигатель (рис. 17.10, в). Принципиальное конструктивное отличие линейного асинхронного двигателя от асинхронного двигателя с вращательным движением ротора
состоит в том, что первичный элемент линейного двигателя (индуктор) создает не вращающееся, а бегущее магнитное поле и нижняя часть двигателя с короткозамкнутой обмоткой (или без нее) называемая вторичным элементом, перемещается вдоль своей оси. Скорость бегущего поля в линейном двигателе (м/с)
v1 = 2τf1 = f1Lc /p (17.7)
где f 1 — частота тока в обмотке статора, Гц; τ — полюсное деление; Lc — длина статора (индуктора), м.
Принцип действия линейного асинхронного двигателя основан на том, что бегущее поле индуктора, сцепляясь с короткозамкнутой обмоткой вторичного элемента двигателя, наводит в ней ЭДС. Возникающие в стержнях этой обмотки токи взаимодействуют с бегущим полем индуктора и создают на индукторе и вторичном элементе электромагнитные силы, стремящиеся линейно переместить подвижную часть двигателя относительно неподвижной. В некоторых конструкциях линейных двигателей подвижной частью является индуктор, а в некоторых — вторичный элемент, называемый в этом случае бегунком. Если вторичный элемент линейного двигателя невозможно изготовить с короткозамкнутой обмоткой, то применяют вторичные элементы в виде полосы из меди, алюминия или ферромагнитной стали. Наиболее удовлетворительными получаются характеристики линейного двигателя при составном вторичном элементе, например выполненном в виде полосы из ферромагнитной стали, покрытой слоем меди.
Основной недостаток асинхронных двигателей с разомкнутым статором — дуговых и линейных — явление краевого эффекта, представляющего собой комплекс электромагнитных процессов, обусловленных разомкнутой конструкцией статора. К нежелательным последствиям краевого эффекта в первую очередь следует отнести появление «паразитных» тормозных усилий, направленных против движения подвижной части двигателя, и возникновение поперечных сил, стремящихся сместить подвижную часть двигателя в поперечном направлении. Кроме того, краевой эффект вызывает ряд других нежелательных явлений, ухудшающих рабочие характеристики линейных двигателей.
Линейные асинхронные двигатели применяют для привода заслонок, ленточных конвейеров, подъемно-транспортных механизмов. На рис. 17.11 показано устройство линейного асинхронного двигателя привода тележки подъемного крана. На тележке 3 расположен индуктор линейного двигателя, состоящий из шихтованного сердечника 6, в пазах которого расположена обмотка 5. Направляющая для колес 2 представляет собой стальную балку 7, к нижней части которой прикреплена стальная полоса 4. Бегущее магнитное поле индуктора наводит в стальной полосе 4 вихревые токи. Электромагнитные силы, возникающие в результате взаимодействия этих токов с магнитным полем индуктора, перемещают индуктор (тележку) вдоль стальной полосы 4.
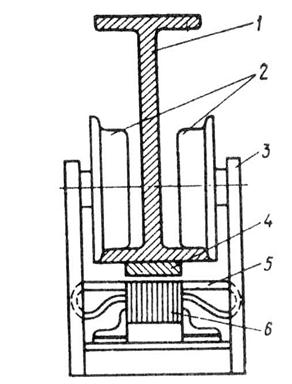
Рис. 17.11. Линейный асинхронный двигатель
привода тележки подъемного крана
Линейные асинхронные двигатели значительной мощности применяют на транспорте в качестве тяговых двигателей. Один из вариантов такого двигателя показан на рис. 17.12. Здесь индуктор 2 двигателя подвешен к транспортному средству 1, а стальная полоса 3 установлена вертикально на основании пути между рельсами. Из этой конструкции поперечная сила Fп вызванная краевым эффектом используется полезно, так как она уменьшает силу давления на несущие оси и колеса и, как следствие, уменьшает трение качения.

Рис 17.12. Линейный асинхронный двигатель
привода железнодорожного транспортного средства
Контрольные вопросы
1.В чем различие между схемами соединения индукционного регулятора напряжения и фазорегулятора?
2.Сколько раз напряжение на выходе ИР достигнет наибольшего значения за один оборот ротора, если обмотка имеет 2р = 6?
3.В каком направлении следует вращать ротор АПЧ, чтобы на выходе получить ЭДС частотой, большей частоты тока в сети?
4.Какую долю мощности на выходе АПЧ составит мощность приводного двигателя, если частота тока на входе АПЧ равна 50 Гц, а на выходе — 100 Гц?
5.Объясните работу сельсинов в индикаторной системе передачи. Чем вызвана ошибка в воспроизведении угла поворота?
6.Чем обеспечивается отсутствие самохода в асинхронном исполнительном двигателе?
7.Объясните принцип работы асинхронного линейного двигателя.
8.Что такое краевой эффект и каковы его нежелательные действия в линейном асинхронном двигателе?
ГЛАВА 18
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 5843; Нарушение авторских прав?; Мы поможем в написании вашей работы!