КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Математическая модель
|
|
|
|
Синхронный двигатель является трехфазной электрической машиной. Это обстоятельство усложняет математическое описание динамических процессов, так как с увеличением числа фаз возрастает число уравнений электрического равновесия, и усложняются электромагнитные связи. Поэтому сведем анализ процессов в трехфазной машине к анализу тех же процессов в эквивалентной двухфазной модели этой машины.
В теории электрических машин доказано, что любая многофазная электрическая машина с n -фазной обмоткой статора и m -фазной обмоткой ротора при условии равенства полных сопротивлений фаз статора (ротора) в динамике может быть представлена двухфазной моделью. Возможность такой замены создает условия для получения обобщенного математического описания процессов электромеханического преобразования энергии во вращающейся электрической машине на основе рассмотрения идеализированного двухфазного электромеханического преобразователя [13,15]. Такой преобразователь получил название обобщенной электрической машины (ОЭМ).
Обобщенная электрическая машина.
ОЭМ позволяет представить динамику реального двигателя, как в неподвижной, так и во вращающейся системах координат. Последнее представление дает возможность значительно упростить уравнения состояния двигателя и синтез управления для него.
Введем переменные для ОЭМ. Принадлежность переменной той или иной обмотке определяется индексами, которыми обозначены оси, связанные с обмотками обобщенной машины, с указанием отношения к статору 1 или ротору 2, как показано на рис. 3.2. На этом рисунке система координат, жестко связанная с неподвижным статором, обозначена  ,
,  , с вращающимся ротором —
, с вращающимся ротором —  ,
,  ,
,  – электрический угол поворота.
– электрический угол поворота.

Рис. 3.2. Схема обобщенной двухполюсной машины
Динамику обобщенной машины описывают четыре уравнения электрического равновесия в цепях ее обмоток и одно уравнение электромеханического преобразования энергии, которое выражает электромагнитный момент машины  как функцию электрических и механических координат системы.
как функцию электрических и механических координат системы.
Уравнения Кирхгофа, выраженные через потокосцепления  , имеют вид
, имеют вид
 (3.1)
(3.1)
где  и
и  — активное сопротивление фазы статора и приведенное активное сопротивление фазы ротора машины, соответственно.
— активное сопротивление фазы статора и приведенное активное сопротивление фазы ротора машины, соответственно.
Потокосцепление каждой обмотки в общем виде определяется результирующим действием токов всех обмоток машины
 (3.2)
(3.2)
В системе уравнений (3.2) для собственных и взаимных индуктивностей обмоток принято одинаковое обозначение  с подстрочным индексом, первая часть которого
с подстрочным индексом, первая часть которого  , указывает, в какой обмотке наводится ЭДС, а вторая
, указывает, в какой обмотке наводится ЭДС, а вторая  — током какой обмотки она создается. Например,
— током какой обмотки она создается. Например,  — собственная индуктивность фазы
— собственная индуктивность фазы  статора;
статора;  — взаимная индуктивность между фазой
— взаимная индуктивность между фазой  статора и фазой ротора и т. п.
статора и фазой ротора и т. п.
Принятые в системе (3.2) обозначения и индексы обеспечивают однотипность всех уравнений, что позволяет прибегнуть к удобной для дальнейшего изложения обобщенной форме записи этой системы
 (3.3)
(3.3)
При работе ОЭМ взаимное положение обмоток статора и ротора изменяется, поэтому собственные и взаимные индуктивности обмоток в общем случае являются функцией электрического угла поворота ротора  . Для симметричной неявнополюсной машины собственные индуктивности обмоток статора и ротора не зависят от положения ротора
. Для симметричной неявнополюсной машины собственные индуктивности обмоток статора и ротора не зависят от положения ротора
 ;
;  , (3.4)
, (3.4)
а взаимные индуктивности между обмотками статора или ротора равны нулю
 (3.5)
(3.5)
так как магнитные оси этих обмоток сдвинуты в пространстве относительно друг друга на угол  . Взаимные индуктивности обмоток статора и ротора проходят полный цикл изменений при повороте ротора на угол
. Взаимные индуктивности обмоток статора и ротора проходят полный цикл изменений при повороте ротора на угол  , поэтому с учетом принятых на рис. 2.1 направлений токов и знака угла поворота ротора можно записать
, поэтому с учетом принятых на рис. 2.1 направлений токов и знака угла поворота ротора можно записать
 (3.6)
(3.6)
где  – взаимная индуктивность обмоток статора и ротора
– взаимная индуктивность обмоток статора и ротора  или
или  когда
когда  , т.е. при совпадении систем координат
, т.е. при совпадении систем координат  и
и  . С учетом (3.3) уравнения электрического равновесия (3.1) можно представить в виде
. С учетом (3.3) уравнения электрического равновесия (3.1) можно представить в виде
 , (3.7)
, (3.7)
где  определяются соотношениями (3.4)–(3.6). Дифференциальное уравнение электромеханического преобразования энергии получим, воспользовавшись формулой
определяются соотношениями (3.4)–(3.6). Дифференциальное уравнение электромеханического преобразования энергии получим, воспользовавшись формулой
 , (3.8)
, (3.8)
где  – угол поворота ротора,
– угол поворота ротора,
 , (3.9)
, (3.9)
где  - число пар полюсов.
- число пар полюсов.
Подставляя уравнения (3.4)–(3.6), (3.9) в (3.8), получим выражение для электромагнитного момента ОЭМ
 . (3.10)
. (3.10)
Двухфазная неявнополюсная синхронная машина с постоянными магнитами.
Рассмотрим электрический двигатель в ЭМУР. Он представляет собой неявнополюсную синхронную машину с постоянными магнитами, так как имеет большое количество пар полюсов  . В данной машине магниты могут быть заменены эквивалентной обмоткой возбуждения без потерь (
. В данной машине магниты могут быть заменены эквивалентной обмоткой возбуждения без потерь ( ), подключенной к источнику тока
), подключенной к источнику тока  и создающей магнитодвижущую силу (рис.3.3.).
и создающей магнитодвижущую силу (рис.3.3.).
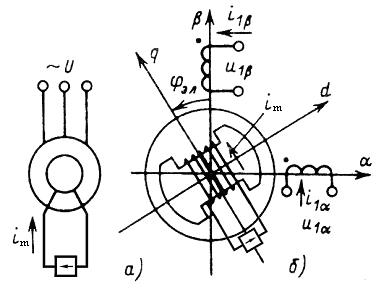
Рис.3.3. Схема включения синхронного двигателя (а) и его двухфазная модель в осях  (б)
(б)
Такая замена позволяет представить уравнения равновесия напряжений по аналогии с уравнениями обычной синхронной машины, поэтому, положив  и
и  в уравнениях (3.1),(3.2) и (3.10), имеем
в уравнениях (3.1),(3.2) и (3.10), имеем
 (3.11)
(3.11)
 (3.12)
(3.12)
 (3.13)
(3.13)
Обозначим  где
где  – потокосцепление на пару полюсов. Сделаем замену (3.9) в уравнениях (3.11)–(3.13), а также продифференцируем (3.12) и подставим в уравнение (3.11). Получим
– потокосцепление на пару полюсов. Сделаем замену (3.9) в уравнениях (3.11)–(3.13), а также продифференцируем (3.12) и подставим в уравнение (3.11). Получим
 (3.14)
(3.14)
 , (3.15)
, (3.15)
где  – угловая скорость двигателя;
– угловая скорость двигателя;  - количество витков статорной обмотки;
- количество витков статорной обмотки;  - магнитный поток одного витка
- магнитный поток одного витка  .
.
Таким образом, уравнения (3.14), (3.15) образуют систему уравнений двухфазной неявнополюсной синхронной машины с постоянными магнитами.
Линейные преобразования уравнений обобщенной электрической машины.
Достоинством полученного в п.2.2. математического описания процессов электромеханического преобразования энергии является то, что в качестве независимых переменных в нем используются действительные токи обмоток обобщенной машины и действительные напряжения их питания. Такое описание динамики системы дает прямое представление о физических процессах в системе, однако является сложным для анализа.
При решении многих задач значительное упрощение математического описания процессов электромеханического преобразования энергии достигается путем линейных преобразований исходной системы уравнений, при этом осуществляется замена действительных переменных новыми переменными при условии сохранения адекватности математического описания физическому объекту. Условие адекватности обычно формулируется в виде требования инвариантности мощности при преобразовании уравнений. Вновь вводимые переменные могут быть либо действительными, либо комплексными величинами, связанными с реальными переменными формулами преобразования, вид которых должен обеспечивать выполнение условия инвариантности мощности.
Целью преобразования всегда является то или иное упрощение исходного математического описания динамических процессов: устранение зависимости индуктивностей и взаимных индуктивностей обмоток от угла поворота ротора, возможность оперировать не синусоидально меняющимися переменными, а их амплитудами и т. п.
Вначале рассмотрим действительные преобразования, позволяющие перейти от физических переменных, определяемых системами координат, жестко связанными со статором  и с ротором
и с ротором  красчетным переменным, соответствующим системе координат u, v, вращающейся в пространстве с произвольной скоростью
красчетным переменным, соответствующим системе координат u, v, вращающейся в пространстве с произвольной скоростью  . Для формального решения задачи представим каждую реальную обмоточную переменную — напряжение, ток, потокосцепление — в виде вектора, направление которого жестко связано с соответствующей данной обмотке осью координат, а модуль изменяется во времени в соответствии с изменениями изображаемой переменной.
. Для формального решения задачи представим каждую реальную обмоточную переменную — напряжение, ток, потокосцепление — в виде вектора, направление которого жестко связано с соответствующей данной обмотке осью координат, а модуль изменяется во времени в соответствии с изменениями изображаемой переменной.
Рис. 3.4. Переменные обобщенной машины в различных системах координат
На рис. 3.4 обмоточные переменные (токи и напряжения) обозначены в общем виде буквой  с соответствующим индексом, отражающим принадлежность данной переменной к определенной оси координат, и показано взаимное положение в текущий момент времени осей
с соответствующим индексом, отражающим принадлежность данной переменной к определенной оси координат, и показано взаимное положение в текущий момент времени осей  , жестко связанных со статором, осей d,q, жестко связанных с ротором, и произвольной системы ортогональных координат u,v, вращающихся относительно неподвижного статора со скоростью . Полагаются заданными реальные переменные в осях
, жестко связанных со статором, осей d,q, жестко связанных с ротором, и произвольной системы ортогональных координат u,v, вращающихся относительно неподвижного статора со скоростью . Полагаются заданными реальные переменные в осях  (статор) и d,q (ротор), соответствующие им новые переменные в системе координат u,v можно определить как суммы проекций реальных переменных на новые оси.
(статор) и d,q (ротор), соответствующие им новые переменные в системе координат u,v можно определить как суммы проекций реальных переменных на новые оси.
Для большей наглядности графические построения, необходимые для получения формул преобразования, представлены на рис. 3.4а и 3.4б для статора и ротора отдельно. На рис. 3.4а показаны оси  , связанные с обмотками неподвижного статора, и оси u,v,повернутые относительно статора на угол
, связанные с обмотками неподвижного статора, и оси u,v,повернутые относительно статора на угол  . Составляющие вектора
. Составляющие вектора  определены как проекции векторов
определены как проекции векторов  и
и  на ось u, составляющие вектора
на ось u, составляющие вектора  — как проекции тех же векторов на ось v. Просуммировав проекции по осям, получим формулы прямого преобразования для статорных переменных в следующем виде
— как проекции тех же векторов на ось v. Просуммировав проекции по осям, получим формулы прямого преобразования для статорных переменных в следующем виде
 (3.16)
(3.16)
Аналогичные построения для роторных переменных представлены на рис. 3.4б. Здесь показаны неподвижные оси , повернутые относительно них на угол оси d, q, связанные с ротором машины, повернутые относительно роторных осей d и q на угол  оси и, v, вращающиеся со скоростью и совпадающие в каждый момент времени с осями и, v на рис. 3.4а. Сравнивая рис. 3.4б с рис. 3.4а, можно установить, что проекции векторов
оси и, v, вращающиеся со скоростью и совпадающие в каждый момент времени с осями и, v на рис. 3.4а. Сравнивая рис. 3.4б с рис. 3.4а, можно установить, что проекции векторов  и
и  на и, v аналогичны проекциям статорных переменных, но в функции угла . Следовательно, для роторных переменных формулы преобразования имеют вид
на и, v аналогичны проекциям статорных переменных, но в функции угла . Следовательно, для роторных переменных формулы преобразования имеют вид
 (3.17)
(3.17)

Рис. 3.5. Преобразование переменных обобщенной двухфазной электрической машины
Для пояснения геометрического смысла линейных преобразований, осуществляемых по формулам (3.16) и (3.17), на рис. 3.5 выполнены дополнительные построения. Они показывают, что в основе преобразования лежит представление переменных обобщенной машины в виде векторов  и
и  . Как реальные переменные и
. Как реальные переменные и  , так и преобразованные
, так и преобразованные  и
и  являются проекциями на соответствующие оси одного и того же результирующего вектора . Аналогичные соотношения справедливы и для роторных переменных.
являются проекциями на соответствующие оси одного и того же результирующего вектора . Аналогичные соотношения справедливы и для роторных переменных.
При необходимости перехода от преобразованных переменных  к реальным переменным обобщенной машины
к реальным переменным обобщенной машины  используются формулы обратного преобразования. Их можно получить с помощью построений, выполненных на рис. 3.5а и 3.5баналогично построениям на рис. 3.4а и 3.4б
используются формулы обратного преобразования. Их можно получить с помощью построений, выполненных на рис. 3.5а и 3.5баналогично построениям на рис. 3.4а и 3.4б
 (3.18)
(3.18)
Формулы прямого (3.16), (3.17) и обратного (3.18) преобразований координат обобщенной машины используются при синтезе управлений для синхронного двигателя.
Преобразуем уравнения (3.14) к новой системе координат  . Для этого подставим выражения переменных (3.18) в уравнения (3.14), получим
. Для этого подставим выражения переменных (3.18) в уравнения (3.14), получим
 (3.19)
(3.19)
Уравнения (3.19) содержат переменные разных осей, поэтому для выделения уравнений электрического равновесия, соответствующих обмотке каждой оси, необходимы их преобразования. С этой целью выполним предусмотренные (3.19) операции дифференцирования произведений потокосцеплений на тригонометрические функции угла  , домножим первое уравнение на
, домножим первое уравнение на  , а второе на
, а второе на  и произведем сложение полученных уравнений. Так как
и произведем сложение полученных уравнений. Так как  , после приведения подобных членов получим уравнение электрического равновесия для оси u. Затем домножим первое уравнение (3.19) на
, после приведения подобных членов получим уравнение электрического равновесия для оси u. Затем домножим первое уравнение (3.19) на  , а второе на
, а второе на  и после выполнения перечисленных операций получим аналогичное уравнение для оси v. В результате преобразований получим
и после выполнения перечисленных операций получим аналогичное уравнение для оси v. В результате преобразований получим
 (3.20)
(3.20)
где  .
.
Аналогично с помощью соотношений (3.18) можно получить уравнения потокосцеплений:
 (3.21)
(3.21)
Воспользуемся формулами преобразования для электромагнитного момента двигателя. Для неявнополюсной машины уравнение момента получим, заменив в (3.10) статорные и роторные переменные в системе на преобразованные по формулам (3.18)
 (3.22)
(3.22)
Так как  , то
, то  и
и  . Объединив уравнения электромеханической характеристики (3.20),(3.21) с уравнением электромагнитного момента (3.22), получим математическое описание механических характеристик двигателя в осях
. Объединив уравнения электромеханической характеристики (3.20),(3.21) с уравнением электромагнитного момента (3.22), получим математическое описание механических характеристик двигателя в осях  :
:
 (3.23)
(3.23)
Анализируя эти уравнения, можно убедиться в том, что переход к модели с взаимно неподвижными обмотками существенно упрощает математическое описание динамических процессов электромеханического преобразования энергии. Коэффициенты взаимной индукции и потокосцепления взаимно неподвижных обмоток (3.21) становятся независимыми от механической координаты, а движение реальных обмоток и вращение координатных осей учитываются в уравнениях электрического равновесия введением дополнительных ЭДС вращения. Значительно упрощается уравнение электромагнитного момента двигателя, в котором устраняется непосредственная зависимость от угла и электромеханическая связь проявляется посредством зависимости токов и потокосцеплений обмоток от скорости двигателя.
Рассмотренные преобразования уравнений во многих случаях позволяют при моделировании на ЭВМ вместо реальных переменных токов и напряжений обмоток оперировать соответствующими им после преобразования постоянными величинами. Этого в ряде случаев удается достигнуть удачным выбором угловой скорости координатных осей . Выбор
 (3.24)
(3.24)
соответствует преобразованию реальных статорных переменных машины к осям d, q, жестко связанным с ротором машины. Уравнения электромеханической характеристики в осях принимают вид
 (3.25)
(3.25)
Разрешив уравнения (3.25) относительно производных, обозначив  ,
,  ,
,  ,
,  и сделав замену
и сделав замену  ,
,  ,
,  , получим уравнения для статорных токов синхронного двигателя с постоянными магнитами в системе координат
, получим уравнения для статорных токов синхронного двигателя с постоянными магнитами в системе координат
 (3.26)
(3.26)
Уравнения (3.26) показывают, что в системе координат электромагнитный момент создается только квадратурной составляющей статорного тока  .
.
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 1610; Нарушение авторских прав?; Мы поможем в написании вашей работы!