КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Инерционные и вибрационные конвейеры
|
|
|
|
Существует два основных типа качающихся инерционных конвейеров: с постоянным (система Маркуса) и переменным (система Крейса) давлением груза на дно желоба. Конвейер Маркуса состоит из желоба, который опирается на стационарные катки, и двухкривошипного привода [2].
Желоб совершает прямолинейное возвратно-поступательное движение в горизонтальной плоскости: в период прямого хода скорость желоба плавно возрастает, затем резко снижается до нуля, а затем меняет направление; в период обратного хода скорость желоба резко возрастает, затем плавно снижается. Во время прямого хода желоба груз движется вместе с ним без скольжения, накапливая кинетическую энергию; при резком изменении скорости груз продолжает перемещаться вперед по инерции с замедлением, скользя вперед и при обратном ходе желоба (желоб как бы выскальзывает из-под груза). При обратном ходе скольжение груза прекращается, и он вместе с желобом движется вперед.
Режим работы конвейера выбирают таким, чтобы обратный ход груза был минимальным. Сила давления груза на дно желоба в каждый цикл колебаний будет одинаковой и равной силе тяжести груза; сила трения груза по дну желоба будет тоже постоянной.
Основными параметрами конвейеров Маркуса являются: амплитуда колебаний желоба 50–150 мм; частота колебаний 40–85 мин-1; ширина желоба 200–1200 мм; длина до 50 м; скорость перемещения груза до 0,2 м/с.
Конвейер Крейса имеет желоб, который опирается на жестко прикрепленные упругие стойки-рессоры, установленные под углом 20–30° к вертикали. Колебательное движение желоб получает от кривошипного привода, который сообщает желобу возвратно-поступательное движение одинакового характера как для прямого, так и для обратного ходов в направлении, перпендикулярном опорным стойкам.
При движении вперед желоб немного приподнимается вверх, а при движении вниз – опускается. Для движения частицы груза вперед при прямом ходе желоба необходимо, чтобы сила трения груза о дно желоба была больше, чем горизонтальная составляющая силы инерции груза.
При обратном ходе, когда желоб движется назад, опускаясь, вертикальная составляющая силы инерции груза направлена вверх, а сила тяжести – вниз. Сила давления груза на дно желоба и сила трения груза уменьшаются. Для движения груза вперед при движении желоба назад необходимо, чтобы горизонтальная составляющая силы инерции была больше силы трения.
Таким образом, силы давления груза на дно желоба при прямом и обратном ходах получаются различными по значению – это обеспечивает возможность непрерывного перемещения груза по желобу.
Для конвейеров Крейса с переменным давлением груза на желоб принимают Г < 1, при этом груз никогда не отрывается от желоба и скользит с переменной скоростью, и ускорение желоба
j ж = n 2 a / 90 > f g / (cosβ – sinβ), (6.17)
где n – частота вращения вала кривошипа, мин-1;
а – амплитуда колебания;
f – коэффициент трения груза о дно желоба;
β – угол наклона опорных стоек к вертикали.
Основными параметрами конвейеров Крейса являются: амплитуда колебаний 10–20 мм; частота колебаний 300–400 мин-1; ширина желоба 200–1000 мм; скорость движения груза на горизонтальном конвейере 0,15–0,2 м/с; угол наклона 10–15°.
Вибрационные конвейеры имеют много различных конструктивных исполнений и классифицируются по различным признакам:
по направлению перемещения груза: горизонтальные; пологонаклонные; вертикальные;
по числу одновременно колеблющихся масс: одномассные; двухмассные; многомассные;
по характеру динамической уравновешенности: уравновешенные; неуравновешенные;
по числу грузонесущих элементов: одноэлементные (с одинарным или сдвоенным грузонесущим элементом); двухэлементные;
по способу крепления грузонесущего элемента: подвесная свободноколеблющаяся конструкция; опорная конструкция с наклонными направляющими упругими элементами;
по назначению: виброконвейеры; питатели и дозаторы; грохоты;
по характеристике и настройке упругих опорных элементов: с резонансной настройкой; с дорезонансной настройкой; с зарезонансной настройкой.
При резонансной настройке частота возмущающейся силы вибровозбудителя ω и основная частота собственных колебаний упругой системы конвейера ω0 одинаковы или близки (для устойчивой работы конвейера 0,85 < ω / ω0 < 1,1). При дорезонансной настройке ω значительно меньше ω0; при зарезонансной настройке ω >> ω0.
Резонансная настройка упругой системы имеет наибольшее распространение, обеспечивает высокую производительность при малом расходе энергии при установившейся работе конвейера, но требует больших пусковых усилий.
Зарезонансная настройка обеспечивает длительную устойчивую работу машины при различных изменениях нагрузки; при зарезонансной настройке пусковые усилия снижаются, но увеличивается расход энергии при установившейся работе конвейера. Зарезонансная настройка используется для подвесных и опорных конвейеров легкого типа. Дорезонансная настройка имеет малое применение.
Грузонесущий элемент вибрационного конвейера совершает прямолинейные (иногда круговые или эллиптические) симметричные гармонические колебательные движения.
Вертикальные вибрационные конвейеры совершают двойное движение: прямолинейное вдоль вертикальной оси и вращательное вокруг вертикальной оси. Вибрационные конвейеры должны обеспечивать минимальную передачу динамических нагрузок на опорные конструкции; полную герметичность транспортирования; автоматическую (в том числе и промежуточную) загрузку и разгрузку; минимальную массу; малые габариты по высоте; высокую надежность.
Наиболее эффективным является использование вибрационных конвейеров для перемещения сухих однородных порошкообразных, зернистых и мелкокусковых грузов.
6.2.3.1 Горизонтальные и пологонаклонные вибрационные конвейеры
Подвесные виброконвейеры. Желоб (или труба) вибрационного конвейера подвесной конструкции (рис. 6.8) свободно подвешен на амортизаторах к опорным стойкам [2].
Желоб получает направленные колебания от центробежного привода, имеющего нижнее или верхнее расположение. Для обеспечения перемещения груза в заданном направлении привод устанавливают под углом β = 20–30° к продольной оси конвейера.
Линия действия возмущающей силы, вызывающей колебания системы, должна проходить через центр инерции (тяжести) системы для исключения дополнительных крутильных колебаний, неблагоприятно действующих на процесс перемещения груза.
Высокая жесткость узла крепления привода к желобу обеспечивает стабильность распространения колебаний и предотвращает возможное разрушение трубы. Увеличение габаритов грузонесущего элемента повышает его массу и уменьшает амплитуду колебаний, поэтому длина вибрационных конвейеров подвесной конструкции не более 6–8 м.
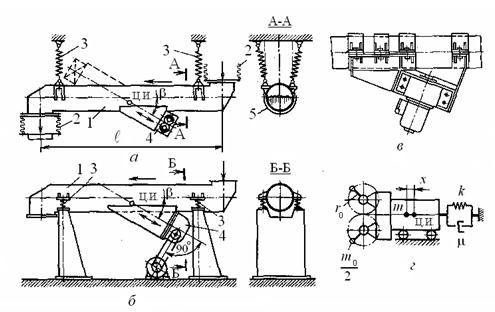
Рис. 6.8. Схемы одномассных свободноколеблющихся вибрационных конвейеров:
а, б, в – конструктивные; г – расчетная; 1 – желоб (труба); 2 – гофрированный патрубок;
3 – амортизатор; 4 – привод; 5 – предохранительный пояс
Преимуществами вибрационных конвейеров подвесной конструкции являются простота; малая масса; возможность промежуточной загрузки и разгрузки; малые динамические нагрузки на опоры. К недостаткам относятся малая длина перемещения и амплитуда колебаний; снижение амплитуды при увеличении загрузки.
Основные параметры конвейеров подвесной конструкции: диаметр трубы: 160, 200, 320, 400 мм; производительность 6–50 м3/ч.
Опорные виброконвейеры. Вибрационный конвейер опорной конструкции (рис. 6.9) состоит из грузонесущего элемента, установленного на опорных упругих элементах под углом β к вертикальной оси опорной рамы, расположенной непосредственно на фундаменте или установленной на упругих амортизаторах [2].
Возмущающая сила привода должна быть направлена под углом направления колебаний β, ее линия воздействия должна проходить через центр инерции колебательной системы.
Основным недостатком таких конвейеров является их неуравновешенность и передача вибронагрузок на опорные конструкции, и поэтому необходимость установки фундаментов. Для уменьшения нагрузок используют тяжелую раму, установленную на амортизаторы (что значительно утяжеляет конвейер).
Опорные конвейеры с центробежными приводами имеют зарезонансную, а с электромагнитным и эксцентриковым приводом резонансную настройку упругой системы.
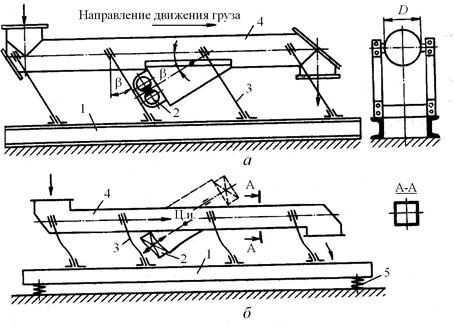
Рис. 6.9. Схемы опорных вибрационных конвейеров:
а – одномассного; б – двухмассного; 1 – опорная рама; 2 – вибропривод; 3 – опорные упругие элементы; 4 – желоб (труба); 5 – амортизаторы
Основными параметрами вибрационных конвейеров опорной конструкции являются: амплитуда колебаний желоба 6 мм; частота 680 мин-1; угол направления колебаний 22°; температура транспортируемого груза не более 100 °С.
Двухтрубный вибрационный конвейер (рис. 6.10) представляет собой уравновешенную двухмассную колебательную систему с нижней и верхней грузонесущими трубами, которые движутся возвратно-поступательно, параллельно друг другу со сдвигом фаз на 180°, т. е. при движении одной трубы вперед другая труба отклоняется назад на ту же величину – этим обеспечивается уравновешивание движущихся масс [2].
Транспортируемый груз перемещается по верхней и нижней трубам в одном направлении.
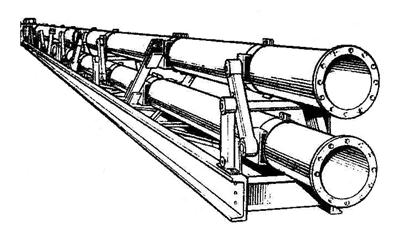
Рис. 6.10. Двухтрубный вибрационный конвейер
Основными параметрами двухтрубных вибрационных конвейеров являются: диаметр трубы: 104, 154, 220, 310, 390, 470 мм; длина 10–30 м; производительность 15–150 м3/ч.
Преимуществами двухтрубных вибрационных конвейеров являются: уравновешенность колеблющихся масс; удвоенная производительность; постоянство амплитуды колебаний; малый расход энергии из-за резонансной настройки упругой системы. К недостаткам относятся: сложность конструкции и узлов промежуточной загрузки и разгрузки; большие габаритные размеры.
6.2.3.2 Вертикальные вибрационные конвейеры
Вертикальный вибрационный конвейер-элеватор (рис. 6.11) имеет жесткий каркас, с наружной стороны которого прикреплен открытый желоб (труба), по которому снизу вверх перемещается груз [2].
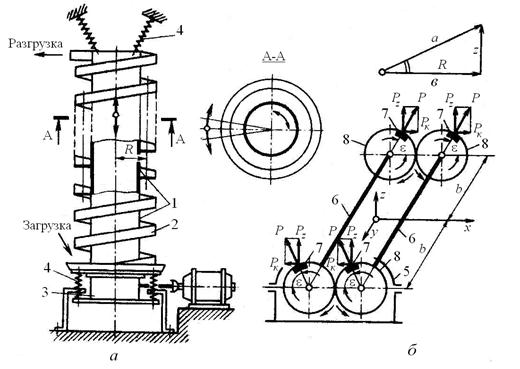
Рис. 6.11. Схема вертикального вибрационного конвейера:
а – конструктивная схема; б – двухвальный центробежный вибровозбудитель;
в – составляющие амплитуды колебания;
1 – цилиндрический каркас; 2 – труба; 3 – привод-вибровозбудитель;
4 – амортизаторы; 5 – каркас; 6 – параллельные валы; 7 – диски; 8 – зубчатые передачи
Вверху или внизу каркаса устанавливается привод-вибровозбудитель, сообщающий каркасу направленные продольные и крутильные колебания, обеспечивая движение груза вверх по спирали. Каркас прикрепляют амортизаторами к опорным частям здания или фундамента.
Вертикальные составляющие Рz центробежных сил Р (рис. 6.11) вызывают колебания конвейера вдоль его вертикальной оси, горизонтальные составляющие Рх центробежных сил, направленные в разные стороны, образуют момент, вызывающий крутильные колебания конвейера. Сочетание этих колебаний при определенной частоте и амплитуде обеспечивает транспортирование груза вверх по спирали.
Вертикальные виброконвейеры имеют частоту колебаний 1000–3000 мин-1; суммарные амплитуды колебаний а = 0,5–8 мм.
К основным параметрам виброконвейеров относятся: диаметр желоба (трубы) D к = 300–900 мм; ширина желоба 100–400 мм; производительность до 20 м3/ч; высота подъема 6–12 м.
Производительность конвейера
Q = 3600 F 0 v ρψ, (6.18)
где F 0 – сечение трубы (желоба), м2;
Ψ – коэффициент наполнения желоба.
Скорость транспортирования
 , (6.19)
, (6.19)
где K 1 и K 2 – эмпирические коэффициенты, зависящие от свойств груза;
α – угол наклона конвейера (угол подъема спирали);
а – амплитуда колебаний;
Г – коэффициент режима работы виброконвейера.
Наружный диаметр каркаса конвейера
D к ≥ Н / 10, (6.20)
где Н – высота подъема, м.
Контрольные вопросы
1. Основные типы и области применения качающихся конвейеров.
2. Преимущества и недостатки качающихся конвейеров.
3. Устройство и основные элементы качающихся конвейеров.
4. Динамические режимы работы качающихся конвейеров.
5. Основные разновидности, устройство и конструкции инерционных и вибрационных конвейеров.
6. Конструктивные особенности и основные параметры горизонтальных и пологонаклонных вибрационных конвейеров.
7. Конструктивные особенности и основные параметры вертикальных вибрационных конвейеров.
|
|
|
|
|
Дата добавления: 2015-03-29; Просмотров: 693; Нарушение авторских прав?; Мы поможем в написании вашей работы!