КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Асинхронного электродвигателя
|
|
|
|
Электромагнитный момент М асинхронного электродвигателя пропорционален основному магнитному потоку  и активной составляющей тока ротора
и активной составляющей тока ротора  , тогда
, тогда
М = k Ф I2 cos j 2, (1.26)
где k — конструктивный коэффициент; Ф — магнитный поток; I  — ток ротора.
— ток ротора.
Конструктивный коэффициент k определяется числом фаз, полюсов и витков в обмотках статора и ротора. Основной магнитный поток Ф определяется напряжением питания и практически не зависит от скольжения s. Ток ротора I2 с увеличением s растет, так как увеличивается частота пересечения проводников ротора магнитным полем статора, а значит, и наводимая в роторе ЭДС:
 , (1.27)
, (1.27)
 где E2неп — фазная ЭДС неподвижного ротора; R2 — активное сопротивление ротора;
где E2неп — фазная ЭДС неподвижного ротора; R2 — активное сопротивление ротора;  — индуктивное сопротивление неподвижного ротора.
— индуктивное сопротивление неподвижного ротора.
Сдвиг по фазе между ЭДС и током ротора j2 с увеличением s также растет из-за увеличения частоты тока в роторе и индуктивного сопротивления обмоток:
 , (1.28)
, (1.28)
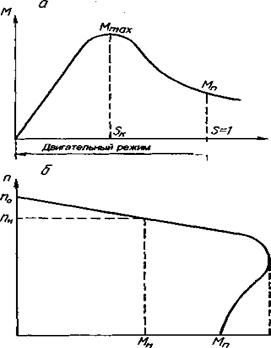
Зависимость электромагнитного момента от скольжения представлена на рис. 1.28,а. Критическое скольжение sk, соответствующее максимальному моменту М  определяется выражением
определяется выражением
 , (1.29)
, (1.29)
где  - активное сопротивление ротора;
- активное сопротивление ротора;  - эквивалентное индуктивное сопротивление, учитывающее индуктивность обмоток статора и ротора. У трехфазных электродвигателей с короткозамкнутым ротором R2 невелико и
- эквивалентное индуктивное сопротивление, учитывающее индуктивность обмоток статора и ротора. У трехфазных электродвигателей с короткозамкнутым ротором R2 невелико и
|
Рис 1.28. Зависимость электромагнитного момента асинхронного электродвигателя от скольжения (а); механическая характеристика асинхронного электродвигателя в двигательном режиме (б).
sk» 0,1. Начальный пусковой момент М  соответствует скольжению s=1.
соответствует скольжению s=1.
Если ротор вращается в сторону, противоположную магнитному полю статора, электромагнитный момент М направлен против направления вращения ротора и является тормозным. Скольжение при этом больше единицы. Потребляемая из сети энергия выделяется в обмотках в виде тепловой и электродвигатель работает в режиме электромагнитного тормоза (торможение противовключением). При построении механических характеристик асинхронных электродвигателей используется упрощенное уравнение, полученное при условии, что активное сопротивление обмотки статора R1 = 0, тогда
 , (1.30)
, (1.30)
где Мк — критический или максимальный момент, соответствующий критическому скольжению sk.
Формула (2.30) удобна для практических расчетов, но дает большие погрешности в зоне малых частот вращения. Если в (2.30) вместо текущих значений М и s подставить номинальные и обозначить Мк/Мн через mк, получим:
 . (1.31)
. (1.31)
Поскольку n=n  (1—s), то (1.30) является формулой механической характеристики и по ней можно строить графики механических характеристик по паспортным данным двигателя.
(1—s), то (1.30) является формулой механической характеристики и по ней можно строить графики механических характеристик по паспортным данным двигателя.
График механической характеристики асинхронного трехфазного электродвигателя, построенный по формуле (1.30), представлен на рис. 1.28,б
Номинальный ток электродвигателя определяется по формуле
 (1.32)
(1.32)
где Рн — номинальная мощность электродвигателя, кВт; UH – номинальное напряжение сети, В; cos j n — коэффициент мощности; h  — коэффициент полезного действия (КПД).
— коэффициент полезного действия (КПД).
Рабочий ток электродвигателя возрастает при увеличении нагрузки на валу. В момент пуска действует пусковой ток
I  =
=  , (1.33)
, (1.33)
где k  — кратность пускового тока (указывается в паспорте двигателя).
— кратность пускового тока (указывается в паспорте двигателя).
Для асинхронных короткозамкнутых электродвигателей k  находится в пределах 5…7.
находится в пределах 5…7.
 - перегрузочная способность двигателя. (1.34)
- перегрузочная способность двигателя. (1.34)
Большой пусковой ток при пуске мощных электродвигателей приводит к снижению напряжения в сети, что вредно сказывается на работе других, ранее включенных двигателей. При значительном снижении напряжения запуск двигателя может оказаться невозможным. Для уменьшения пусковых токов применяют пуск двигателя с переключением обмоток статора со звезды на треугольник. В момент пуска обмотки включены в звезду, а когда частота вращения двигателя достигает номинального значения, происходит переключение обмотки статора на треугольник (рис. 1.29). Этот способ снижения пускового тока применим, если электродвигатель предназначен для включения в сеть треугольником.
При включении обмоток в звезду напряжение на каждой фазе уменьшается в  раз, а фазные токи — в 3 раза. Мощность электродвигателя при пуске также снижается в 3 раза, что является недостатком данного способа, поскольку электродвигатель может быть пущен при нагрузке не более 1/3 от номинальной. Если для привода рабочей машины требуется электродвигатель мощностью более 10 кВт и она имеет большие маховые массы (пилорамы, дробилки кормов, мельницы), рекомендуется применять трехфазные асинхронные электродвигатели с фазным ротором.
раз, а фазные токи — в 3 раза. Мощность электродвигателя при пуске также снижается в 3 раза, что является недостатком данного способа, поскольку электродвигатель может быть пущен при нагрузке не более 1/3 от номинальной. Если для привода рабочей машины требуется электродвигатель мощностью более 10 кВт и она имеет большие маховые массы (пилорамы, дробилки кормов, мельницы), рекомендуется применять трехфазные асинхронные электродвигатели с фазным ротором.
 А В С
А В С
С1 С2 С3
КМ2
С4 С5 С6
КМ1
Рис. 1.29. Схема переключения обмоток статора асинхронного электродвигателя со звезды на треугольник при пуске.
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 750; Нарушение авторских прав?; Мы поможем в написании вашей работы!