КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Формообразование поверхностей
|
|
|
|
МЕТАЛЛОРЕЖУЩИХ СТАНКОВ
ОСНОВЫ КИНЕМАТИКИ
Металлорежущий станок как техническая система представляет собой объединение трех подсистем: кинематической структуры, системы управления и компоновки (несущей системы). При этом первоначальной базой любого станка является его кинематическая структура, выражаемая кинематической схемой, в дальнейшем для краткости называемой кинематикой станка, так как функция станка – создание относительных движений инструмента и заготовки для получения в процессе обработки заданных поверхностей. Следовательно, и при конструировании, и при эксплуатации необходимо прежде всего знать кинематическую структуру станка. Именно поэтому в цикле станочных дисциплин первой изучается кинематическая структура станков (дисциплина «Станочное оборудование»). Затем в соответствующих дисциплинах изучаются две другие подсистемы.
Для кинематической схемы конкретной конструкции станка свойствен подробный показ элементов и механизмов, в том числе типовых, составляющих структуру кинематических цепей общей кинематической схемы станка. Однако на начальном этапе разработки кинематической структуры и при изучении конкретной группы станков, объединенных общей первообразной целевой функцией, целесообразно заменить кинематическую схему структурной. Для этого достаточно последовательности типовых механизмов, например зубчатых и других передач, гитар сменных зубчатых колес и т.п., без ущерба для раскрытии сущности станка обобщить простейшими конструктивными признаками. При этом на первом начальном уровне обсуждения как при конструировании, так и при изучении кинематическая структура относительно выделена из общей структуры станка, т.е. целесообразно организованной технической системы. Это объясняется также тем, что при одной и той кинематической структуре возможно использование различных систем управления.
Несмотря на большое разнообразие станков, предназначенных для выполнения не только различных, но и однотипных технологических операций, кинематическая структура станка базируется на ряде достаточно общих фундаментальных закономерностей, присущих всем станкам. Знание этих закономерностей позволяет быстрее осваивать, рациональнее эксплуатировать и проектировать станки, наиболее полно отвечающие требованиям современного промышленного производства.
Форма любой детали есть замкнутое пространство, ограниченное реальными геометрическими поверхностями, которые образованы в результате обработки тем или иным способом (резанием, штамповкой, литьем и т.д.). При этом какой бы способ обработки ни был применен, реальные поверхности детали всегда отличаются от идеальных геометрических поверхностей, которыми мы мысленно оперируем при конструировании. Поверхности, полученные на металлорежущих станках резанием, отличаются от идеальных формой, размерами и шероховатостью. Теоретически процесс формирования реальных поверхностей на станках аналогичен процессу образования идеальных поверхностей в геометрии, т.е. базируется на идеальных геометрических представления.
Любую геометрическую поверхность можно представить как след движения одной линии (образующей) по другой (направляющей). Обе эти линии называют производящими. Например, круговая цилиндрическая поверхность может быть представлена как след движения прямой линии по окружности (рис. 2.1, а) или след движения окружности по прямой (рис. 2.1, б). Боковую поверхность зуба прямозубого цилиндрического колеса можно рассматривать как след движения эвольвенты вдоль прямой линии (рис. 2.1, в) или след движения прямой по эвольвенте (рис. 2.1, г). Таким образом, с геометрической точки зрения процесс образования поверхности сводится к осуществлению движения одной производящей линии по другой.
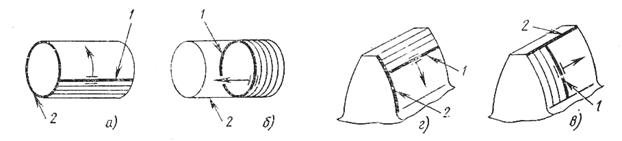 Рис. 2.1. Образование поверхностей: 1 ─ образующая производящая
Рис. 2.1. Образование поверхностей: 1 ─ образующая производящая
линия;2 ─ направляющая производящая линия
Производящие линии на станках образуются посредством вспомогательных элементов (характеристических образов инструментов) в виде материальной точки или линии на режущей кромке инструмента за счет согласованных относительных движений заготовки и инструмента. Причем следует подчеркнуть, что почти все производящие линии на станках образуются (имитируются) непрерывно в течение всего времени формообразования поверхности. В процессе непрерывной имитации обеих производящих линий и образуется с помощью резания требуемая поверхность.
Согласованные относительные движения заготовки и режущего инструмента, которые непрерывно создают производящие линии, и следовательно, поверхность заданной формы в целом, называют формообразующими (рабочими) и обозначают буквой Ф. В зависимости от формы производящей линии и метода ее образования движения формообразования могут быть простыми и сложными. К простым движениям формообразования относят вращательное, которое обозначают Ф (В), и прямолинейное ─ Ф (П).
Сложными формообразующими движениями являются те, траектории которых образуются в результате согласованности взаимозависимых (функционально связанных) двух и более вращательных или прямолинейных движений, а также их сочетаний. Примеры условной записи сложных формообразующих движений: Ф (В1В2), Ф (В1П2), Ф(В1П2П3) и т.п.
Запись двух и более простых движений в одних общих скобках говорит о том, что они зависят друг от друга и тем самым создают единое сложное движение.
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 1133; Нарушение авторских прав?; Мы поможем в написании вашей работы!