КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Аффинные преобразования, их свойства, однородные координаты
|
|
|
|
Представление геометрических моделей. Полигональные сетки.
Наиболее распространённые представления графических объектов:
1. Пространственное подразбиение.
Если в трёхмерном пространстве есть тело, то это пространство можно разбить на кубики (воксели). Для каждого кубика b(i, j, k) можно указать, пересекается ли он с телом, то есть лежит ли он внутри, на границе – 1 или вне тела – 0. В некоторых случаях удобно применять некоторые промежуточные значения, задавая тем самым плотность в данной точке пространства.
Характеристики воксельного представления:
• Только приближение реального объекта. Поверхности, не параллельные осям координат, представляются приблизительно. Качество приближения зависит от относительного размера вокселей.
• Требует больших размеров памяти для хранения, и эти требования резко возрастают при увеличении разрешения (растет как куб от разрешения).
• С таким представлением хорошо работают в основном пространственные алгоритмы, такие как вычисление объема объекта, нахождение центра масс и т.д.
• Можно проводить набор операций: пересечение, объединение, вычитание. 2. Граничное (поверхностное). Тела задаются ограниченными фрагментами поверхностей.
3. Конструктивное.
При конструктивном представлении вводятся примитивы тел. Конструируя эти объекты и применяя теоретико-множественные операции, можно получить более сложное тело.
Под операциями понимаются булевы операции над примитивами, а так же геометрические преобразования, такие как передвижение, поворот, изменение размеров.
Полигональная сетка представляет собой совокупность ребер, вершин и многоугольников.
Для решения таких задач, как движение объектов и их частей, управления камерой применяются аффинные преобразования (АП), рассмотрим их основные свойства:
1) точки, лежащие на одной прямой, после преобразования лежат на одной прямой;
2) пересекающиеся прямые остаются пересекающимися, а параллельные – параллельными;
3) при АП пространства пересекающиеся плоскости остаются пересекающимися, параллельные – параллельными, а скрещивающиеся – скрещивающимися;
4) при АП сохраняются отношения площадей двух квадратов на плоскости и отношение объемов двух кубов в пространстве.
Пусть М - произвольная точка плоскости с координатами х и у, вычисленными относительно заданной прямолинейной координатной системы. Однородными координатами этой точки называется любая тройка одновременно неравных нулю чисел x1, x2, x3, связанных с заданными числами x и y следующими соотношениями:
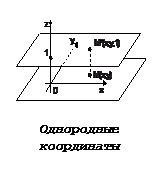 x1/x3=x, x2/x3=y.
x1/x3=x, x2/x3=y.
При решении задач компьютерной графики однородные координаты обычно вводятся так: произвольной точке М (х, у) плоскости ставится в соответствие точка М *(х, у,1) в пространстве. Произвольная точка на прямой, соединяющей начало координат, точку 0 (0, 0, 0) с точкой М *(х, у, 1), может быть задана тройкой чисел вида (hx, hy, h).
Будем считать, что h ¹0. Вектор с координатами hx, hy, h является направляющим вектором прямой, соединяющей точки 0 (0, 0, 0) и М *(х, у, 1). Эта прямая пересекает плоскость z = 1 в точке (х, у, 1), которая однозначно определяет точку (х, у) координатной плоскости ху.
При помощи троек однородных координат и матриц третьего порядка можно описать любое аффинное преобразование плоскости. В самом деле, считая h = 1, сравним две записи: помеченную символом * и матричную:
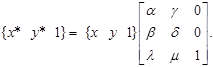
Нетрудно заметить, что после перемножения выражений, стоящих в правой части последнего соотношения, мы получим обе формулы (*) и верное числовое равенство 1 == 1. Тем самым сравниваемые записи можно считать равносильными.
Выпишем соответствующие матрицы третьего порядка для базовых аффинных преобразований:
1. Матрица вращения (rotation)
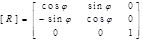 ; ;
| 2. Матрица растяжения (сжатия) (dilatation)
 ; ;
|
3. Матрица переноса (translation)
 ; ;
| 4. Матрица отражения (reflection)
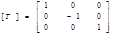
|
|
|
|
|
|
Дата добавления: 2015-03-29; Просмотров: 1108; Нарушение авторских прав?; Мы поможем в написании вашей работы!