КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Приведенное сопротивление трансформатора
|
|
|
|
Определим приведенное активное сопротивление:

по аналогии:
Уравнения ЭДС и токов для приведенного трансформатора теперь будут иметь вид:
Схема замещения асинхронного двигателя и назначение элементов, входящих в неё
Для анализа работы асинхронного двигателя пользуются схемой замещения. Схема замещения асинхронного двигателя аналогична схеме замещения трансформатора и представляет собой электрическую схему, в которой вторичная цепь (обмотка ротора) соединена с первичной цепью (обмоткой статора) гальванически вместо магнитной связи, существующей в двигателе.
|
| Рис. 10.17. Схема замещения асинхронного двигателя |
Основное отличие асинхронного двигателя от трансформатора в энергетическом отношении состоит в следующем. Если в трансформаторе энергия, переданная переменным магнитным полем во вторичную цепь, поступает к потребителю в виде электрической энергии, то в асинхронном двигателе энергия, переданная вращающимся магнитным полем ротору, преобразуется в механическую и отдается валом двигателя потребителю в виде механической энергии.
Электромагнитные мощности, передаваемые магнитным полем во вторичную цепь трансформатора и ротору двигателя, имеют одинаковые выражения:
Р эм = Р 1 - Δ Р 1.
В трансформаторе электромагнитная мощность за вычетом потерь во вторичной обмотке поступает к потребителю:
(10.46)
Р 2 = Р эм - 3 I 22 r 2 = 3 U 2 I 2 cos φ2 = 3 I 22 r п = 3 I' 22 r' п,
где r п — сопротивление потребителя. В асинхронном двигателе электромагнитная мощность за вычетом потерь в обмотке ротора превращается в механическую мощность:
(10.47)
Р 2 = Р мех = Р эм - 3 I 22 r 2 = Р эм - 3 I' 22 r' 2.
Подставив в (10.47) вместо Р ее значение из (10.42), получим
(10,48)
| P мех=3 I 22 | r 2(1 - s) | =3 I' 22 | r' 2(1 - s) | = 3 I 22 r' э = 3 I' 22 r' э, | ||||
| s | s | |||||||
| где r' э = r' 2 | 1 - s | . | ||||||
| s | ||||||||
Сравнивая выражения (10.46) и (10.48), можно заключить, что
r' п = r' э.
Таким образом, потери мощности в сопротивлении r' э численно равны механической мощности, развиваемой двигателем.
Заменив в схеме замещения трансформатора сопротивление нагрузки r' п на r' э = r' 2 (1 - s)/ s, получим схему замещения асинхронного двигателя (рис. 10.17). Все остальные элементы схемы замещения аналогичны соответствующим элементам схемы замещения трансформатора: r 1, х 1 — активное сопротивление и индуктивное сопротивление рассеяния фазы обмотки статора; r' 2, х' 2— приведенные к обмотке статора активное сопротивление и индуктивное сопротивление рассеяния фазы обмотки ротора.
Приведенные значения определяются так же, как и для трансформатора:
r' 2 = r 2 k 2, х' 2 = х 2 k 2,
где k = E 1/ E 2к = U 1ф/ E 2к — коэффициент трансформации двигателя.
Может возникнуть сомнение в возможности использования гальванической связи цепей статора и ротора в схеме замещения, поскольку частоты в этих цепях на первый взгляд не одинаковы. Первая часть схемы замещения представляет собой эквивалентную схему фазы обмотки ротора, которая, как было показано в § 10.7, приведена к частоте тока статора. В реальном же двигателе в отличие от схемы замещения частоты тока ротора и статора не одинаковы.
Вращающий момент асинхронного двигателя
Вращающий момент в асинхронном двигателе создается взаимодействием тока ротора с магнитным полем машины. Вращающий момент математически можно выразить через электромагнитную мощность машины:

где w1=2pn1/60 — угловая частота вращения поля.
В свою очередь, n1=f160/Р, тогда
 Подставим в формулу M1 выражение Рэм=Рэ2/S и, разделив на 9,81, получим:
Подставим в формулу M1 выражение Рэм=Рэ2/S и, разделив на 9,81, получим:
Отсюда следует, что момент двигателя пропорционален электрическим потерям в роторе. Подставим в последнюю формулу значение тока I2’:
 получим уравнение вращающего момента асинхронного двигателя:
получим уравнение вращающего момента асинхронного двигателя:
 где U1 — фазное напряжение обмотки статора.
где U1 — фазное напряжение обмотки статора.
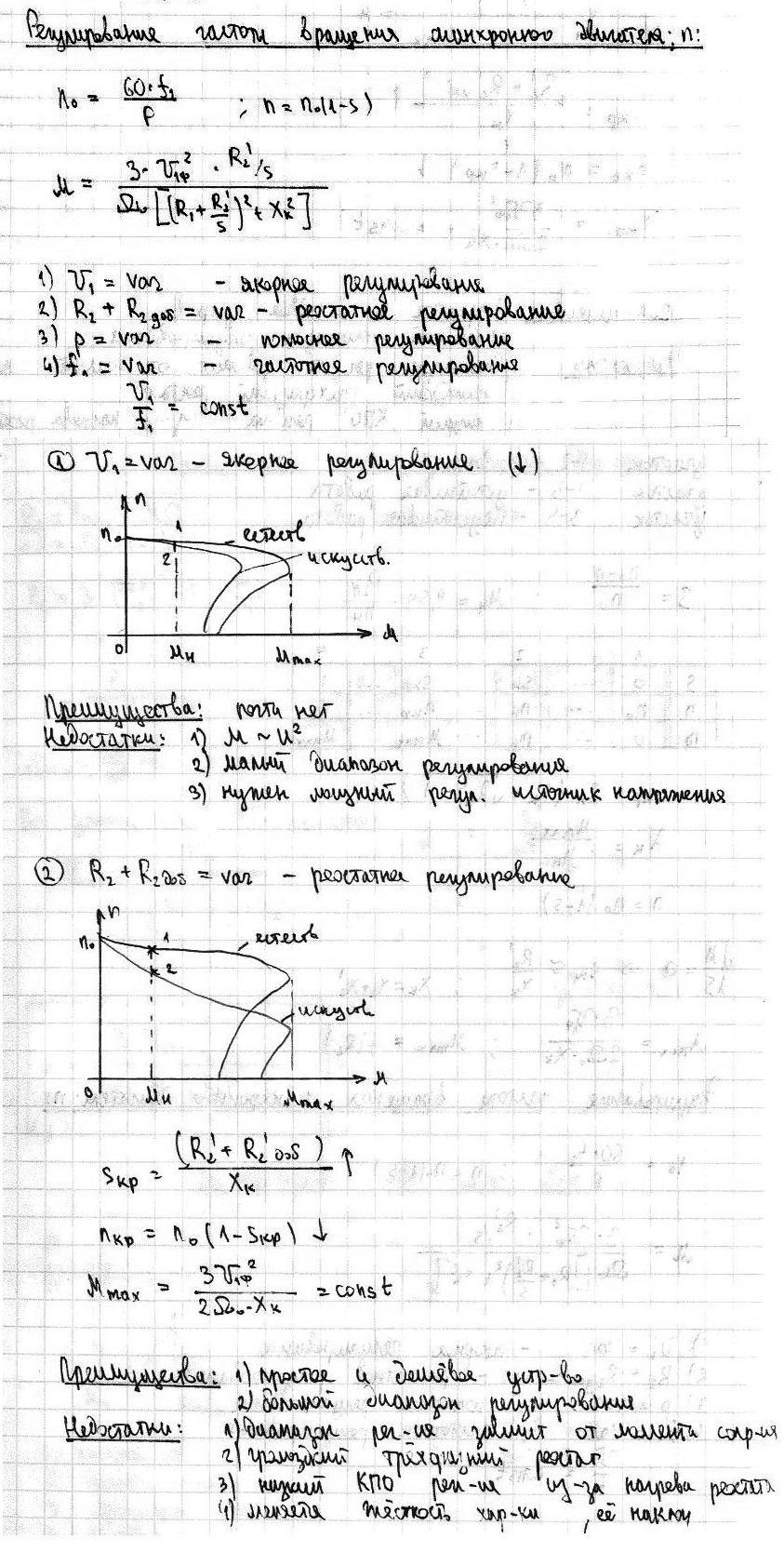
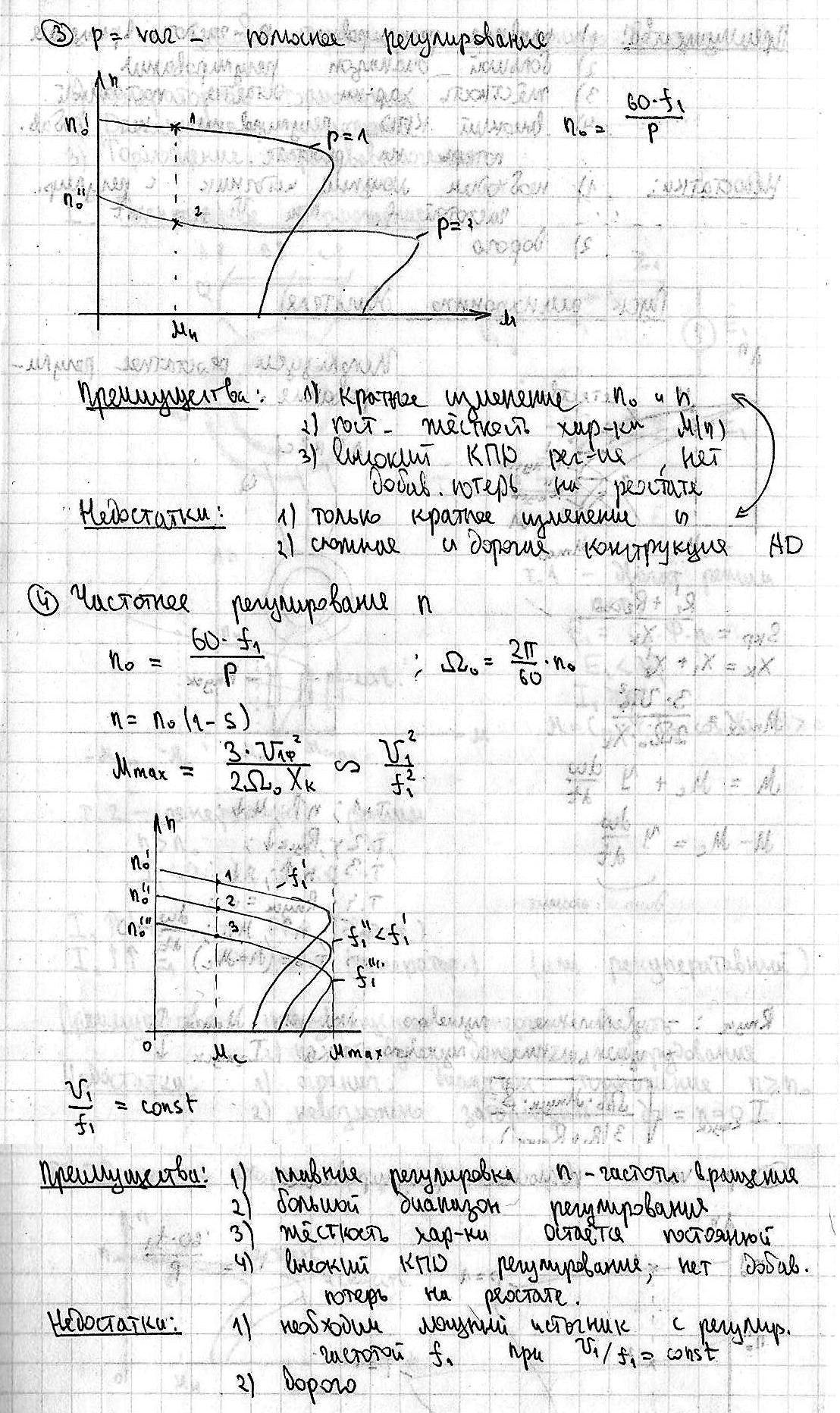
Регулирование скорости вращения асинхронных двигателей
В асинхронных двигателях частота вращения определяется из равенства
где n1= 60f 1/ р.
Из этого равенства следует, что изменять п можно тремя способами: изменением частоты f1, числа пар полюсов р и скольжения s. Частоту вращения ротора в принципе можно регулировать изменением напряжения питания U1. Однако с увеличением U1 появляется опасность превышения допустимой температуры нагрева двигателя, а с уменьшением U1 уменьшается перегрузочная способность двигателя.
|
|
|
|
|
Дата добавления: 2015-05-06; Просмотров: 1814; Нарушение авторских прав?; Мы поможем в написании вашей работы!