КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Вопорс 39 2 страница
|
|
|
|
По аналогии с трансформатором, МДС ротора направлена противоположно МДС статора. Поэтому чтобы скомпенсировать МДС ротора, МДС статора должна увеличиваться.
Таким образом, геометрическая сумма МДС статора и ротора всегда будет равна МДС статора при холостом ходе:
 Разделим на
Разделим на  и получим:
и получим:  ; (6.13)
; (6.13)
ki=m2 kоб2 w2/(m1 kоб1 w1) (6.15)
Коэффициент ki называют коэффициентом трансформации двигателя по току.
Для двигателя с короткозамкнутым ротором  (число фаз неравно) и
(число фаз неравно) и  уравнения (6.13) примет вид:
уравнения (6.13) примет вид:
 или
или  , (6.14)
, (6.14)
где  - приведенный ток ротора.
- приведенный ток ротора.
Ток статора из (6.14) окончательно равен:
 (6.16)
(6.16)
Ток статора, как и ток первичной обмотки трансформатора, имеет две составляющие: ток холостого хода Io, составляющий 40 – 60 % от номинального тока, и ток ротора  обусловленный нагрузкой. Так как ток Х.Х. в 3-4 раза меньше тока статора при номинальной нагрузке, с грубым приближением можно записать
обусловленный нагрузкой. Так как ток Х.Х. в 3-4 раза меньше тока статора при номинальной нагрузке, с грубым приближением можно записать  . (Это окажется полезным при выводе формулы вращающего момента АД).
. (Это окажется полезным при выводе формулы вращающего момента АД).
Большое значение тока Х.Х. обусловлено тем, что магнитный поток статора дважды пересекает воздушный зазор, обладающий большим магнитным сопротивлением, и, как следствие для создания достаточного магнитного потока требуется значительно большая МДС, чем у трансформатора. Основной в токе Х.Х. является намагничивающая составляющая, носящая индуктивный характер.
Составляющая тока ротора  появляется только тогда, когда к роторному (валу) приложен тормозящий момент.
появляется только тогда, когда к роторному (валу) приложен тормозящий момент.
Вопрос 45. Вращающий момент в AD создается в результате взаимодействия вращающего поля, Ф и тока в роторе I2.
Развиваемая электромагнитная мощность будет:  =
=  (6.15)
(6.15)
Полная механическая мощность, развиваемая ротором:  =
=  =
= 
Если параметры ротора приведены к статору, то электрическая мощность:
 =
= 

 Так как
Так как  =
=  , то
, то  =
= 

 Тогда
Тогда
 , (6.16) где:
, (6.16) где:  - число фаз статора;
- число фаз статора;  - приведенный ток в обмотке ротора;
- приведенный ток в обмотке ротора;  =
=  +
+  - активное сопротивление цепи ротора;
- активное сопротивление цепи ротора;  - приведенное активное сопротивление обмотки ротора;
- приведенное активное сопротивление обмотки ротора;  - добавочное активное сопротивление, которое может быть введено в цепь обмотки ротора (в двигателях с фазным ротором).
- добавочное активное сопротивление, которое может быть введено в цепь обмотки ротора (в двигателях с фазным ротором).
Чтобы получить зависимость вращающего момента от параметров двигателя воспользуемся Г-образной схемой замещения асинхронного двигателя (рис.6.9.). Здесь намагничивающий контур С-Д вынесен на зажимы внешней сети А-В. Чтобы ток  остался без изменения, дополнительно введены сопротивления
остался без изменения, дополнительно введены сопротивления  и
и  . При таком изменении схемы ошибка незначительна, т. к. Е1 мало отличается от U1.
. При таком изменении схемы ошибка незначительна, т. к. Е1 мало отличается от U1.
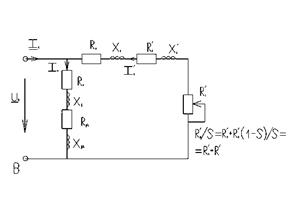 Рис.6.9 Г-образная схема замещения АД
Рис.6.9 Г-образная схема замещения АД
Из схемы Замещения АД:  (6.17)
(6.17)
Подставляя величину  в (6.16), получим
в (6.16), получим 
Так как  , то
, то  (6.18)
(6.18)
Параметры схемы замещения АМ  ,
,  ,
,  , и
, и  , входящие в выражение (6.18), являются косвенными, т.к. их значения при изменении нагрузки машины остаются практически неизменными. Постоянными можно считать также напряжение на обмотке фазы статора
, входящие в выражение (6.18), являются косвенными, т.к. их значения при изменении нагрузки машины остаются практически неизменными. Постоянными можно считать также напряжение на обмотке фазы статора  , и частоту
, и частоту  . В выражении момента М (6.18) единственная переменная величина – скольжение S, которое для различных режимов работы АМ может принимать значение в диапазоне от
. В выражении момента М (6.18) единственная переменная величина – скольжение S, которое для различных режимов работы АМ может принимать значение в диапазоне от  до
до  . Так как индуктивное сопротивление АД
. Так как индуктивное сопротивление АД  , а активным сопротивлением обмотки статора можно пренебречь и считать
, а активным сопротивлением обмотки статора можно пренебречь и считать
 , то (6.18) можно записать так
, то (6.18) можно записать так  , (6.18а)
, (6.18а)
где  .
.
Вращающий момент (6.18) прямо пропорционален квадрату напряжения сети  , поэтому АД весьма чувствителен к изменению напряжения.
, поэтому АД весьма чувствителен к изменению напряжения.
Например, при уменьшении напряжения сети на 10% относительно номинального ( ) электромагнитный момент двигателя уменьшается на 19%:
) электромагнитный момент двигателя уменьшается на 19%:  M=0,81М, где М- момент при номинальном напряжении сети, а
M=0,81М, где М- момент при номинальном напряжении сети, а  - момент при пониженном напряжении сети.
- момент при пониженном напряжении сети.
Исследуем зависимость вращающего момента  от скольжения при условии, что
от скольжения при условии, что  и частота
и частота  постоянны (
постоянны ( ,
,  ) и постоянны параметры схемы замещения. Эту зависимость принято называть механической характеристикой АМ.
) и постоянны параметры схемы замещения. Эту зависимость принято называть механической характеристикой АМ.
В момент пуска двигателя в ход скольжение равно единице ( ) и развиваемый двигателем пусковой момент равен
) и развиваемый двигателем пусковой момент равен
 (6.19)
(6.19)
т.е. величина пускового момента зависит от активного сопротивления обмотки ротора. Поэтому для увеличения пускового момента в цепь ротора вводят на время пуска пусковой реостат (для двигателей с фазным ротором).
На рисунке 6.10 приведена зависимость  вращающего момента от скольжения при
вращающего момента от скольжения при  ,
,  и
и  .
.
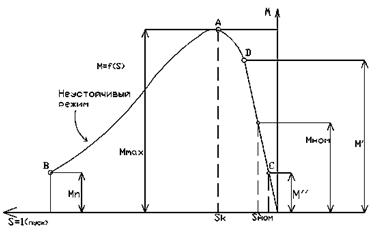 Рис. 6.10 Зависимость электромагнитного вращающего момента
Рис. 6.10 Зависимость электромагнитного вращающего момента  .
.
Из анализа механической характеристики следует, что устойчивая работа АД возможна при скольжении меньше критического (S<  ), т.е. на участке ОА - участке устойчивой работы. АВ - участок неустойчивой работы (
), т.е. на участке ОА - участке устойчивой работы. АВ - участок неустойчивой работы ( )- незначительное увеличение нагрузочного момента вызовет увеличение скольжения S, которое будет продолжаться до тех пор, пока S=1, т.е. пока ротор не остановится.
)- незначительное увеличение нагрузочного момента вызовет увеличение скольжения S, которое будет продолжаться до тех пор, пока S=1, т.е. пока ротор не остановится.
Если работа происходит на участке ОА, то при увеличении нагрузочного момента на валу двигателя скорость его вращения уменьшится, что приведет к увеличению скольжения  увеличится момент
увеличится момент  наступит динамическое равновесие.
наступит динамическое равновесие.
Если работа двигателя происходит на участке АВ, то увеличение нагрузочного момента на валу может вызвать остановку двигателя.
Таким образом, при достижении электромагнитным моментом максимального значения  наступает предел устойчивости работы АД, т.е. необходимо, чтобы сумма моментов, действующих на ротор, была меньше
наступает предел устойчивости работы АД, т.е. необходимо, чтобы сумма моментов, действующих на ротор, была меньше  .
.
Для определения значения максимального вращающего момента  следует найти величину
следует найти величину  , при которой наступает этот момент. Для этого возьмем производную
, при которой наступает этот момент. Для этого возьмем производную  и приравняем ее нулю. После преобразований получим:
и приравняем ее нулю. После преобразований получим:  (6.20)
(6.20)  - называется критическим скольжением.
- называется критическим скольжением.
Подставив значение критического скольжения (6.20) в выражение электромагнитного момента (6.18), после ряда преобразований получим выражение максимального момента [Н  м]:
м]:
 (6.21) В (6.20) и (6.21) знак “+” соответствует двигательному, а знак “-” – генераторному режиму работы АМ.
(6.21) В (6.20) и (6.21) знак “+” соответствует двигательному, а знак “-” – генераторному режиму работы АМ.
Для АМ общего назначения активное сопротивление обмотки статора  намного меньше суммы индуктивных сопротивлений
намного меньше суммы индуктивных сопротивлений  <<
<< 
Поэтому, пренебрегая величиной  , получим упрощенное выражение критического скольжения
, получим упрощенное выражение критического скольжения
 (6.22) и максимального момента [Н м]
(6.22) и максимального момента [Н м]  (6.23)
(6.23)
В АД с фазным ротором можно получить максимальный момент при пуске. Для этого в цепь обмотки ротора включают такое пусковое сопротивление  , чтобы
, чтобы  ; при этом
; при этом  =1 (кривая 1 на фиг.6.11).
=1 (кривая 1 на фиг.6.11).
Каждому значению активного сопротивления ротора соответствует своя характеристика  . В процессе пуска, когда пусковой реостат постепенно выводится, двигатель постепенно переходит с одной характеристики на другую. Если бы реостат не выводился, то момент изменялся бы по кривой 1 и устойчивая работа, например, при номинальном моменте
. В процессе пуска, когда пусковой реостат постепенно выводится, двигатель постепенно переходит с одной характеристики на другую. Если бы реостат не выводился, то момент изменялся бы по кривой 1 и устойчивая работа, например, при номинальном моменте  соответствовала бы точке “а”, т.е. двигатель имел бы пониженную скорость вращения.
соответствовала бы точке “а”, т.е. двигатель имел бы пониженную скорость вращения.
Основным параметром, характеризующий данный двигатель, является номинальный момент  , т.е. момент, развиваемый при номинальной скорости вращения. Другими важнейшими характеристиками двигателя являются
, т.е. момент, развиваемый при номинальной скорости вращения. Другими важнейшими характеристиками двигателя являются  и
и  .
.
Применение формул (6.18) и (6.18а) для расчета механических характеристик АД не всегда возможно, т.к. параметры схемы замещения двигателя обычно не приводятся в каталогах и справочниках, поэтому для практических расчетов обычно пользуются упрощенной формулой момента. В основу этой формулы заложено допущение, что активное сопротивление обмотки статора  , при этом
, при этом
 (6.24) Критическое скольжение определяется по формуле
(6.24) Критическое скольжение определяется по формуле
 (6.25) где
(6.25) где  - перегрузочная способность
- перегрузочная способность  . Расчет механической характеристики намного упрощается, если его вести в относительных единицах:
. Расчет механической характеристики намного упрощается, если его вести в относительных единицах:  . В этом случае уравнение механической характеристики имеет вид:
. В этом случае уравнение механической характеристики имеет вид:  (6.26)
(6.26)
Применение упрощенной формулы (6.26) наиболее целесообразно при расчете рабочего участка механической характеристики при скольжении  , т.к. в этом случае величина ошибки не превышает значений, указанных в ТУ.
, т.к. в этом случае величина ошибки не превышает значений, указанных в ТУ.
При скольжении  ошибка составляет 15-17%
ошибка составляет 15-17%
Вопрос 46.
Механической характеристикой называется зависимость частоты вращения двигателя от вращающего момента  при
при  . Её можно построить используя зависимость
. Её можно построить используя зависимость  и соотношения между n2 и S (
и соотношения между n2 и S ( или
или  ). Из формулы для скольжения (из круглой скобки) получаем, что скорость вращения ротора АD:
). Из формулы для скольжения (из круглой скобки) получаем, что скорость вращения ротора АD:
 ,откуда видно, что частота вращения ротора n2 и скольжение являются линейно-зависимыми величинами (при n1=const). При S=1 n2=0, а при S=0 n2=n1. Следовательно, точке S=1 на оси абсцисс соответствует точка n2=0, т.е. начало оси для частоты вращения.
,откуда видно, что частота вращения ротора n2 и скольжение являются линейно-зависимыми величинами (при n1=const). При S=1 n2=0, а при S=0 n2=n1. Следовательно, точке S=1 на оси абсцисс соответствует точка n2=0, т.е. начало оси для частоты вращения.
Совместив начала осей для момента M и частоты n2 и повернув оси на угол 90 по часовой стрелке, получим механическую характеристику AD (рис. 6.22).
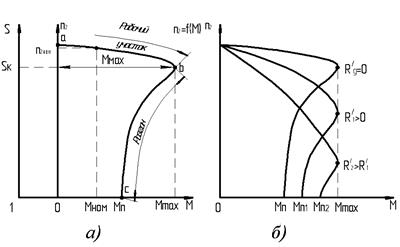 а) – с короткозамкнутым ротором; б) – с фазным ротором;
а) – с короткозамкнутым ротором; б) – с фазным ротором;
Точка «с» – начало пуска; «с-в» – разгон; «а-в» – рабочий участок.На ней можно отметить максимальный момент  , пусковой момент
, пусковой момент  (момент при пуске двигателя, т.е. при
(момент при пуске двигателя, т.е. при  ); номинальный момент
); номинальный момент  , соответствующий номинальному режиму работы двигателя(ему соответствует номинальная частота вращения ротора
, соответствующий номинальному режиму работы двигателя(ему соответствует номинальная частота вращения ротора  , указываемая в паспорте двигателя).
, указываемая в паспорте двигателя).
Двигатель разгоняется в соответствии с механической характеристикой: разгон начинается с точки «с», затем проходит точка «в» и двигатель оказывается в установившемся режиме, т.е. вращается с частотой  на участке «а-в» в точке, соответствующей условию
на участке «а-в» в точке, соответствующей условию  (где
(где  - тормозящий момент). Т.к. точки характеристики на участке «в-с» соответствует разгону, а рабочим участком является участок «а-в», на котором при изменении вращающего момента от О до
- тормозящий момент). Т.к. точки характеристики на участке «в-с» соответствует разгону, а рабочим участком является участок «а-в», на котором при изменении вращающего момента от О до  частота вращения двигателя меняется мало. Такая механическая характеристика называется жесткой характеристикой.
частота вращения двигателя меняется мало. Такая механическая характеристика называется жесткой характеристикой.
Устойчивая работа двигателя, т.е. работа при  , возможна только на участке «а-в». Допустим, что в исходном режиме двигатель работает в точке “a’” механической характеристики (рис.6.23).
, возможна только на участке «а-в». Допустим, что в исходном режиме двигатель работает в точке “a’” механической характеристики (рис.6.23).
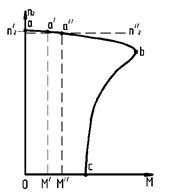 Т.е. имеет частоту вращения
Т.е. имеет частоту вращения  и развивает вращающий момент
и развивает вращающий момент  . Если при этом увеличивается тормозной момент от
. Если при этом увеличивается тормозной момент от  до
до  , то возникает неравенство моментов:
, то возникает неравенство моментов:  . Т.к. тормозной момент становится больше вращающего момента, то ротор начинает тормозиться, увеличивается скольжение, Э.Д.С. и ток ротора, а, следовательно, увеличивается и вращающий момент двигателя. Замедление ротора продолжается до тех пор, пока не наступит равенство моментов:
. Т.к. тормозной момент становится больше вращающего момента, то ротор начинает тормозиться, увеличивается скольжение, Э.Д.С. и ток ротора, а, следовательно, увеличивается и вращающий момент двигателя. Замедление ротора продолжается до тех пор, пока не наступит равенство моментов:  =
=  . При этом устанавливается постоянная частота вращения
. При этом устанавливается постоянная частота вращения  . Этим значениям на графике соответствует точка
. Этим значениям на графике соответствует точка  . При уменьшении тормозного момента рассматриваемые величины изменяются в обратном порядке.
. При уменьшении тормозного момента рассматриваемые величины изменяются в обратном порядке.
Таким образом, как бы не изменялся тормозной момент в пределах участка «а-в», двигатель может так изменить вращающий момент, что условие его устойчивой работы всегда сохранится. В этом заключается свойство внутреннего саморегулирования АD.
Когда тормозный момент становится равным максимальному, вращающий момент начинает уменьшаться и равенство становится невозможным – двигатель останавливается. Поэтому максимальный момент называют также ОПРОКИДЫВАЮЩИМ МОМЕНТОМ. Механическая характеристика АD при  (Рис. 6.22а) относится к коротко замкнутому ротору и называется ЕСТЕСТВЕННОЙ.
(Рис. 6.22а) относится к коротко замкнутому ротору и называется ЕСТЕСТВЕННОЙ.
Вопрос 47. Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения  , к.п.д., полезного момента (момента на валу)
, к.п.д., полезного момента (момента на валу)  , коэффициента мощности
, коэффициента мощности  и тока статора
и тока статора  от полезной мощности
от полезной мощности  при
при  и
и  .
.
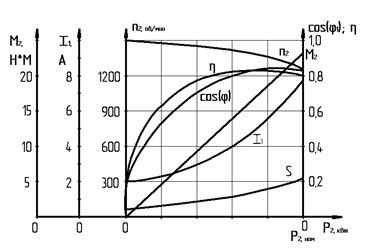 Рабочие характеристики АD.
Рабочие характеристики АD.
Скоростная характеристика  .
.
Частота вращения ротора АD:  .
.
Скольжение:  .
.
(Электрические потери в роторе прямо пропорциональны скольжению:  , где электромагнитная мощность асинхронного двигателя), т.е. скольжение двигателя, а, следовательно и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности
, где электромагнитная мощность асинхронного двигателя), т.е. скольжение двигателя, а, следовательно и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности  .
.
Пренебрегая электрическими потерями в роторе в режиме холостого хода ( ), можно принять, что
), можно принять, что  и
и  . По мере увеличения нагрузки на валу двигателя отношение
. По мере увеличения нагрузки на валу двигателя отношение  растёт, достигая значений 0,01-0,08 при номинальной нагрузке. В соответствии с этим зависимость
растёт, достигая значений 0,01-0,08 при номинальной нагрузке. В соответствии с этим зависимость  представляет собой кривую слабо наклонённую к оси абсцисс. Однако, при увеличении активного сопротивления ротора
представляет собой кривую слабо наклонённую к оси абсцисс. Однако, при увеличении активного сопротивления ротора  угол наклона этой кривой увеличивается.
угол наклона этой кривой увеличивается.
Вопрос 48
Синхронные машины характерны тем, что ротор в установившемся режиме вращается с угловой скоростью вращающегося магнитного момента, создаваемого токами фазных обмоток статора (подобно статору АМ).
Это достигается тем, что ротор синхронных машин представляет собой электромагнит (иногда постоянный магнит) с числом полюсов равным числу пар полюсов вращающегося магнитного поля.
Взаимодействие полюсов вращающегося магнитного поля и полюсов ротора обеспечивает постоянную угловую скорость последнего независимо от момента на валу.
Это свойство синхронных машин позволяет использовать их в качестве двигателей с постоянной скоростью для электропривода.
Как все электрические машины, синхронные машины обратимы: они могут работать как в качестве генератора, так и в качестве двигателя.
Трехфазные синхронные генераторы – самые мощные электрические машины.
В настоящее время и в ближайшие десятилетия основными источниками электроэнергии останутся синхронные генераторы, установленные на тепловых, атомных и гидроэлектростанциях. Мощность синхронных генераторов
РС.Г.=(10…100)х1000 КВ . А
Статор синхронных машин ничем (кроме размеров) не отличается от статоров асинхронных машин. Ротор синхронной машины представляет собой электромагнит, возбуждаемый постоянным током.
 Рис 7.1 Электрическая схема машины (а) и ее условное обозначение на схеме (б)
Рис 7.1 Электрическая схема машины (а) и ее условное обозначение на схеме (б)


Рис 7.2 Роторы синхронной машины: а – явнополюсный; б – неявнополюсный; 1 – полюс, 2 – катушка.
Явнополюсный ротор (рис 7.2 а), имеющий выступающие полюсы, применяется до 1000 – 1500 об/мин. Для быстроходных мощных машин, работающих со скоростями 1500 – 3000 об/мин, явнополюсный ротор конструктивно невыполним из-за сложности обеспечения надежного крепления полюсов при больших центробежных силах. Поэтому для быстроходных машин применятся неявнополюсный ротор, имеющий вид цилиндра без выступающих полюсов (рис 7.2 б). При указанных направлениях токов в обмотке ротора создается магнитное поле с двумя полюсами «N» и «S», показанными на рисунке 7.2 б.
У тихоходных машин для получения нужной частоты переменного тока явнополюсный ротор выполняется с десятками полюсов. Неявнополюсные роторы изготавливаются обычно двухполюсными или четырехполюсными.
Постоянный ток для питания обмотки возбуждения может подводиться от небольшого генератора постоянного тока – возбудителя (вращающегося вместе с ротором или приводимого отдельным двигателем) или от выпрямительной установки рис 7.3.
Рис 7.3 Схема бесщеточного возбуждения синхронного генератора: ПВ – подвозбудитель; В – возбудитель – генератор («обращенной конструкции»); Т – турбина.
Вопрос 49
При холостом ходе ток статора синхронной машины равен 0. На рис 7.4 дана схема трехфазной синхронной машины. Вал машины, показанный на рисунке штриховой линией, сочленен с первичным двигателем, который приводит генератор во вращение с постоянной скоростью n0 (в оборотах в минуту)
Рис 7.4 Схема синхронного трехфазного генератора: 1 – статор, 2 – ротор, 3 – вал ротора, 4 – контактные кольца, 5 – щетки.
Ток возбуждения IВ, поступающий в цепь ротора от источника постоянного тока, может регулироваться от нуля до некоторого максимального значения. Это позволяет изменять магнитный поток ротора в широких пределах, то есть получать различные значения ЭДС статора, так как она пропорциональна магнитному потоку ротора. Распределение магнитного потока по окружности статора делают близким к синусоидальному. Поэтому можно считать, что при вращении ротора магнитный поток, связанный с каждой фазой обмотки статора, изменяется по гармоническому закону. Тогда действующая синусоидальная ЭДС Е0, индуцируемая при холостом ходе в одной фазе, равна
E0=4,44 . k . w . f . Ф0 (7.1)
где: k – обмоточный коэффициент машины, w – число витков одной из фаз статора, включенных последовательно; Ф0 – максимальный поток полюса ротора при токе возбуждения IВ.
Частота f ЭДС, индуктируемых в статоре, определяется выражением
f=p . n0/60 (7.2)
Согласно формулам (7.1) и (7.2) ЭДС статора при неизменной скорости n0=const пропорциональны току. Поэтому зависимость E0 от IB, то есть характеристика холостого хода синхронного генератора, подобна зависимости магнитного потока от тока возбуждения (рис 7.5)

Рис 7.5 Характеристика холостого хода (а) и векторная диаграмма (б) синхронного генератора.
|
|
|
|
|
Дата добавления: 2015-05-06; Просмотров: 318; Нарушение авторских прав?; Мы поможем в написании вашей работы!