КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Выбор и расчет тактового генератора
|
|
|
|
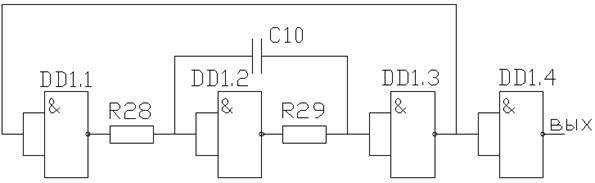
Рисунок 3
 |
.1.1.
В качестве тактового генератора можно использовать автоколебательный мультивибратор.
Существует множество видов автоколебательных мультивибраторов (выполненных на разных элементах). Если рассмотреть некоторые из них, то можно увидеть их достоинства и недостатки. Например:
1. Автоколебательный мультивибратор с коллекторно-базовыми связями. Достоинствами этого мультивибратора являются: высокая стабильность амплитуды генерируемых импульсов и высокий коэффициент использования напряжения. Недостатки: мультивибратор имеет режим «жесткого» возникновения колебаний, сопротивление нагрузки существенно влияет на период колебаний мультивибратора, значительная длительность фронтов импульсов на коллекторах транзисторов (при их запирании).
2. Автоколебательный мультивибратор на ОУ. Достоинства: высокая нагрузочная способность и значительная амплитуда импульсов. Недостатки: сравнительно невысокое быстродействие, нестабильность частоты формируемого сигнала.
3. Автоколебательный мультивибратор на логических элементах.  К достоинствам данного мультивибратора можно отнести: простоту конструкции и хорошо фиксированные уровни U0 и U1. Недостатки: низкая стабильность частоты (из-за влияния внешних параметров: температура и д.р.), требуется индивидуальная подборка элементов времязадающей цепи.
К достоинствам данного мультивибратора можно отнести: простоту конструкции и хорошо фиксированные уровни U0 и U1. Недостатки: низкая стабильность частоты (из-за влияния внешних параметров: температура и д.р.), требуется индивидуальная подборка элементов времязадающей цепи.
В результате анализа приведенных выше достоинств и недостатков мультивибраторов я остановил свой выбор на автоколебательном мультивибраторе на логических элементах (рис. 3.1.1.).
Рассчитаем параметры время задающей цепи. Эти параметры задаются элементами: R28, R29, C10. Расчет ведется из одного из параметров технического задания, т.е. T=1c – период формирования выходного сигнала. Зададимся следующими значениями времязадающей цепи:
 ,
,
в результате чего получим:
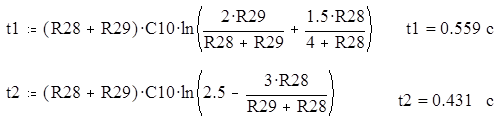
где t1 и t2 – длительности квазиустойчивых состояний, т.е. t1 – соответствует моменту, когда на выходе логическая 1 (U1=Umax), а t2 – соответствует моменту, когда на выходе логический 0 (U0=Umin). Получим период колебаний:
 .
.
Рассчитаем выходные напряжения:

 ,
,
Отсюда видим, что выходная амплитуда тактового генератора равна:
 .
.
IпотТГ= IпотDD1.1+ IпотDD1.2+ IпотDD1.3+ IпотDD1.4= 16 mA.
3.2. Выбор и расчет интеграторов.
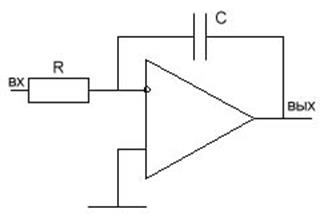 |
Интеграторы широко используются при построении аналоговых решающих и моделирующих устройств. Схема простейшего интегратора на ОУ представлена на рис.3.2.1. Он создается введением
Рисунок 3.2.1.
по инвертирующему входу ОУ емкости С. Токи, текущие через емкость и через сопротивление равны. Тогда можно записать:
где UВЫХ 0 – выходное напряжение при t=0. А так как отсчет времени ведут с момента поступления входного сигнала, причем обычно при t=0 Uвх=0 и Uвых=0. В связи с этим, UВЫХ 0 можно принять равным нулю.
Интегратор DA3 выполнен на ОУ с емкостью C8 в ООС и сопротивлением R28 на входе (в интегратор), имеем:
Т.к. интеграторы имеют одинаковые постоянные интегрирования, то можно рассчитать только один из них, и применить результат ко второму интегратору.
Рассмотрим первый участок интегрирования от 0В до +15В., минимальное время интегрирования здесь равно 10 мс, а максимальное 100мс, рассчитаем для минимального времени:
Arctg(15/0,001)=RC, возьмем C=10пФ, получим:
Rпост.≈100*103 Ом. Для верхнего предела времени получим:
Arctg(15/0,01)=RC, при C=10пФ, получим:
R≈1.27*106 Ом. Изменяющаяся часть должна быть равна Rизм=1МОм.
В качестве ОУ возьмем ОУ следующего типа: К140УД7 .
3.3. Расчет делителей напряжений
В данном курсовом проекте опорные напряжения задаются матрицей сопротивлений. Рассчитаем делитель напряжения R6-R7. Его схема приведена на рисунке.
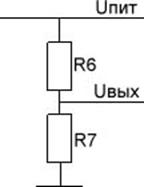
Рисунок 3.3.1.
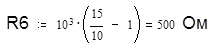
Выходное напряжение равно Uвых=5В. Напряжение питания равно Uп=15В. Все операционные усилители в данной работе запитываются от этого напряжения. Пусть R6=1кОм. Запишем формулу для нахождения Uвых, и, выразив из этого выражения R13, найдем это сопротивление:
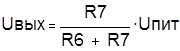
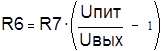 , отсюда имеем
, отсюда имеем
Рассчитаем делитель R13-R15 (рис. 3.3.2.)
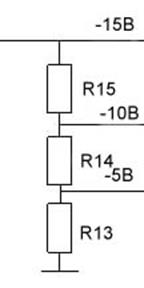 Рисунок 3.3.2.
Рисунок 3.3.2.
|
Находим значения сопротивлений аналогично предыдущему делителю. Зададимся R13=1kОм, получим:
R14=1kОм.
Аналогично получим R15=1kОм.
 |
|
|
|
|
|
Дата добавления: 2015-05-06; Просмотров: 1339; Нарушение авторских прав?; Мы поможем в написании вашей работы!