КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример реализации алгоритма передачи команд
|
|
|
|
Пример алгоритма, реализующего процесс сканирования
Итак, существует ряд алгоритмов, выполняющих процессы сканирования. Более подробно этот вопрос изложен в [9, 10, 40], где приведены описания алгоритмов, которые представлены в других разделах данной главы. Ниже даны обобщенные выводы из указанных источников, соответствующие максимально строгим требованиям по обслуживанию вызовов.
R — предыдущие состояния точек опроса линейки;
R — последующие состояния точек опроса линейки;
R — состояния линейки в таблице блокировки для опроса линейки.
Остальные переменные R,R,R,R вычисляются в процессе работы алгоритма и поясняются по ходу его рассмотрения.Верхний индекс в алгоритме означает текущий номер обслуживаемой линейки, который изменяется в соответствии с оператором 20 этого алгоритма. Алгоритм начинается с периодического запуска таймера. В данном случае выбран период запуска 10 мс, что гарантирует чтение наиболее короткого сигнала (импульса дискового набора номера) от 2 до 3 раз. Многократный опрос в дальнейшем позволяет отличить реальный сигнал от помехи.
В начале алгоритма выполняются операторы 1-7, обрабатывающие буфер заявок, поступивших от уже начавшихся процессов. Такой приоритет в обработке позволяет не ставить на обслуживание новые заявки, чтобы избежать перегрузки алгоритмов обработки. Данный участок алгоритма определяет наличие сигналов, которые ожидает остановленный после перехода процесс. Алгоритм при этом доставляет в процесс сигнал ВХОД.
Второй участок содержит операторы 8-12, выявляющие наличие изменений в состоянии внешней среды. Принцип его работы заключается в том, что сопоставляются предыдущее состояние линеек R1 и последующее R2 и определяется, есть ли изменения по сравнению с предыдущим моментом времени.
Например, если в некоторый десятимиллисекундный цикл к:
R = 00101101, a
R = 10010101, то
R = R R = 10111000.
Разряды результата, равные единице, говорят о наличии изменения, при этом следует обратить внимание на то, что отмечены два типа перехода — из 1 в 0 и из 0 в 1.
Рассмотрим один из возможных вариантов реализации алгоритма передачи команд. Основные его особенности:
- рассматривается наиболее сложный случай — передача в медленные устройства;
-считается, что периферийные устройства дублированы, что также усложняет алгоритм;
- при невыполнении команды предусматривается ее повтор.
Таким образом, алгоритм реализует наиболее сложный случай и при конкретном применении может быть упрощен, если отказаться от одного из перечисленных условий. Например, в современных станциях с распределенным управлением группы управления могут быть настолько уменьшены, что управление ими может осуществляться без резерва и повторов при невыполнении команды.
Рис. 5 Общая структура передачи команд в периферийные устройства
Общая структура алгоритма передачи команд показана на рис. 5. На нем, как и в предыдущем случае (алгоритм сканирования), показана входная информация (предыдущее и последующее состояния). По этой информации находится последовательность команд, которая подлежит передаче. Кроме того, на вход алгоритма поступает информация от алгоритма сканирования (результат сканирования контрольных точек), которая используется для проверки правильности передачи команд. Остальная информация вводится до начала работы алгоритма и является информацией настройки. Последовательность команд задается таблицей, которая каждой паре состояний ставит в соответствие совокупность команд. Признаки выполнения записываются в каждую команду и указывают на способ выполнения команд (последовательное, по условию, по времени).
Длина буфера вычисляется исходя из нагрузки на модуль и указывает максимальное количество заявок, которое может находиться в очереди на выполнение алгоритма передачи команд.
4. Сети абонентского доступа. С развитием потребностей в услугах передачи данных корпоративные пользователи организовывали телефонную связь через учрежденческую АТС (УАТС). 
Рисунок 4 - Сеть абонентского доступа с разделением потоков
Услуги передачи данных обслуживались локальной сетью LAN (LocalAreaNetwork), потоки информации объединялись в системе передачи к станции, где снова разделялись на два потока. Система объединения и разделения потоков (рис. 4) получила название «интегральное оборудование разделения доступа» (IAD, IntegratedAccessDevice).
С ростом потребностей в различных услугах информационной сети разработано оборудование, позволяющее объединять и разделять потоки от различных абонентских служб к различным поставщикам этих услуг (рис. 5). На рисунках АК — абонентский комплект, а парными стрелками обозначены регенераторы
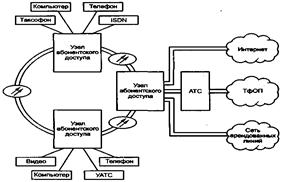
Рисунок 5 – Варианты построения сетей абонентского доступа
|
|
|
|
|
Дата добавления: 2015-03-29; Просмотров: 499; Нарушение авторских прав?; Мы поможем в написании вашей работы!