КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Кинематический анализ планетарных механизмов
|
|
|
|
Планетарные механизмы
Механизмы, включающие неподвижные колёса, называются планетарными (рис. 4.12). Они состоят из центральных колёс 1 и 3, оси которых совпадают, водила Н и сателлита 2 (их может быть несколько). Сателлит вращается относительно своей оси и одновременно обкатывается вокруг колеса 1. Зубья колеса 1 нажимают на зубья колеса 2 и поворачивают его относительно неподвижного (опорного) колеса 3. При этом сателлит нажимает на свою ось и заставляет водило Н вращаться.
|
|
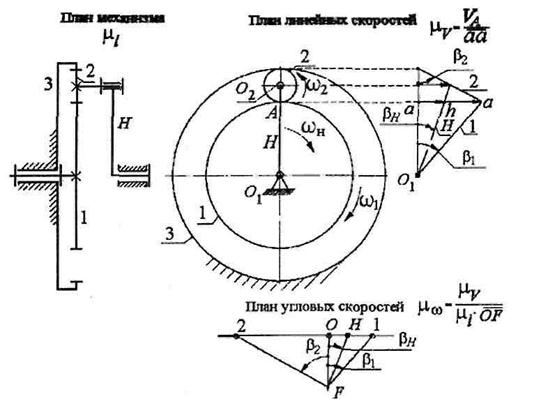
Рис. 4.12. Планетарный механизм
Кинематический анализ планетарных механизмов выполняется по методу Виллиса, основанному на остановке водила. Для этого всей планетарной передаче (рис. 4.12) мысленно сообщается вращение с угловой скоростью водила, но направленной в обратную сторону, т.е. – ω Н. Таким образом, получается обращенное движение, при котором водило мысленно останавливается, а другие колёса освобождаются. Преобразованный механизм представляет собой рядовой зубчатый механизм, скорость звеньевв котором составляет ω Н = 0; ω1(н)=ω1(3) – ω Н (3); колесо 3 было неподвижно, а в преобразованном механизме его угловая скорость равнаω Н (3).
Верхний индекс показывает неподвижное звено. Мысленная остановка водила равноценна вычитанию его угловой скорости из угловых скоростей подвижных колёс. Передаточное отношение в преобразованном механизме в итоге представляется как
 . Но поскольку ω3(3) = 0, то получается
. Но поскольку ω3(3) = 0, то получается
 , откуда передаточное отношение планетарного механизма будет
, откуда передаточное отношение планетарного механизма будет  . При этом
. При этом  .
.
В обращенном механизме сателлит 2 является "паразитным" колесом и лишь изменяет направление вращения ведомого колеса. Окончательно будем иметь:


В общем виде формула Виллиса представляется как
где n и l – центральные колёса. При этом
При графическом методе определения передаточных отношений в планетарном механизме строятся планы линейных и угловых скоростей (рис. 4.12). Тогда
 .
.
Из плана угловых скоростей:


где μω – масштабный коэффициент плана угловых скоростей.
Передаточное отношение i 1-н(3) оказывается положительным, так как отрезки  и
и  располагаются по одну и ту же сторону от вертикали OF.
располагаются по одну и ту же сторону от вертикали OF.
|
|
|
|
|
Дата добавления: 2015-03-31; Просмотров: 3637; Нарушение авторских прав?; Мы поможем в написании вашей работы!