КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принципи керування
|
|
|
|
У техніці використовуються три фундаментальних принципи:
1) Принцип розімкненого керування;
2) Принцип компенсації (керування за збуренням);
3) Принцип зворотного зв'язку (керування за відхиленням).
Принцип розімкненого керування полягає в тому, що алгоритм керування ґрунтується тільки на заданому алгоритмі функціонування і не контролюється збуреннями чи вихідними координатами. Структурна схема САР з принципом розімкненого керування наведена на рис.1.1
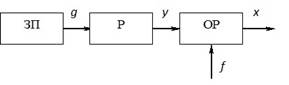
Рис.1.1
ЗП – задавальний пристрій; Р – регулятор; ОР – об'єкт регулювання; g – задавальний вектор станів пристрою; у – вектор станів регулятора; f – збурення; x – вектор станів об'єкта регулювання (вихідна величина).
У такій системі контроль за фактичним станом об'єкта регулювання не здійснюється, тому що близькість до бажаної поведінки системи забезпечується тільки точністю всіх елементів системи і відповідним вибором задавального вектора станів. Прикладом такої системи є параметричний стабілізатор напруги на стабілітроні. По розімкненому принципу побудовані пристрої пуску, лінійні підсилювачі, перетворювачі та ін.
Для компенсації відхилення x, що відбувається за рахунок появи збурень застосовують принцип компенсації та принцип зворотного зв'язку.
Принцип компенсації полягає в перетворенні збурення у величину того ж характеру, що і задавальний вплив, і зміні вектора регулятора таким чином, щоби здійснювалася повна компенсація збурення. Для цього вводиться канал компенсації КК.
Структурна схема САР з принципом компенсації наведена на рис.1.2.
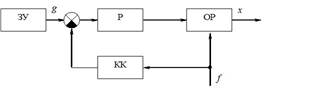
Рис.1.2
Перевагою принципу компенсації є можливість досягти інваріантості по збуренню. Недоліком є те, що відхилення вхідної величини від заданого значення може бути викликане впливом інших збурень.
Принцип компенсації використовується в системах стабілізації змінних стану об’єкта регулювання (струму, напруги, сили звуку, положення в просторі, тощо) в умовах збурень (зміна струму навантаження, напруга мережі, тощо).
У статичному режимі для систем стабілізації існують наступні типи залежностей вихідної величини x(t) від величини збурення f (рис.1.3):
1 – перекомпенсація;
2 – інваріантність – властивість системи, в якій збурення не впливає на вихідну величину;
3 – недокомпенсація;
4 – нелінійна залежність.
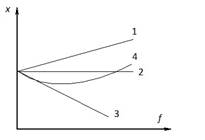

Рис.1.3
Принцип керування по відхиленню полягає в тому, що вихідна величина вимірюється, і порівнюється з задавальним впливом. У результаті виділяється деяке відхилення (сигнал неузгодженості  , рис.1.4), що перетворюється у вектор регулювання y, який впливає на ОР таким чином, щоби зменшити зміну х.
, рис.1.4), що перетворюється у вектор регулювання y, який впливає на ОР таким чином, щоби зменшити зміну х.

Рис.1.4
У системі автоматичного регулювання для реалізації керування по відхиленню вводять зворотний зв’язок на відміну від принципу компенсації, в якому немає зворотного зв’язку, і вихідна величина не надходить на вхід схеми.
Переваги принципу зворотного зв’язку:
1) відхилення х зменшується незалежно від того, якими факторами воно викликане;
2) менша чутливість до зміни параметрів елементів схеми в порівнянні з розімкненими системами;
3) принцип можна застосовувати до об'єктів, характеристики яких невідомі – бажано знати характеристики об’єкту, але не обов’язкове детальне і точне знання всіх характеристик, більш принциповою є умова можливості керування, тобто керованості об’єкту керування;
4) технічно легше реалізовується в порівнянні з розімкненими системами, де необхідний точний попередній розрахунок всіх параметрів, характеристик та сигналів, їх узгодження між собою, а також підлаштування параметрів в процесі роботи.
Недоліки:
1) у простих одноконтурних системах не можна досягти повної інваріантності;
2) для систем із зворотними зв’язками характерна проблема стійкості.
Застосування комбінованого регулювання по збуренню та відхиленню підвищує ефективність регулювання. Комбіновані регулятори поєднують переваги обох принципів – швидкість реакції на зміну збурення і точне регулювання незалежно від причини, що викликала відхилення.
|
|
|
|
|
Дата добавления: 2015-05-08; Просмотров: 1780; Нарушение авторских прав?; Мы поможем в написании вашей работы!