КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Типові керуючі впливи
|
|
|
|
При аналізі роботи САК або її окремих ланок розглядають типові тестові функції, у якості типових використовують одне з наступних збурень.
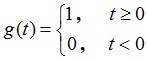
1) Вплив у вигляді одиничної східчастої функції (рис.2.1,а).
 (2.1)
(2.1)
Зображення за Лапласом функції g(t) має вигляд:
 .
.
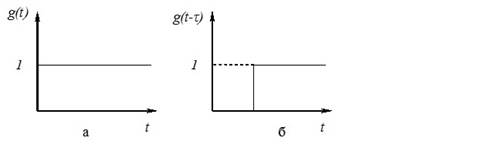
Рис.2.1
Розглядають також одиничну східчасту функцію із запізненням (рис.2.1,б):
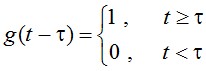 (2.2)
(2.2)
Зображення за Лапласом:
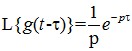 .
.
Одинична функція використовується при дослідженні пускових режимів, скиданнях і накидах навантаження.
2) Гармонічний вплив:
 ,
,  . (2.3)
. (2.3)
Використовується для дослідження автоматичних систем у режимі незгасаючих коливань.
3) Поліноміальний вплив:
 (2.4)
(2.4)

Поліноміальна функція використовується для оцінки похибок від степеневих функцій. Найбільш часто використовують стрибок швидкості і стрибок прискорення, які є стандартними у режимі постійної швидкості  або постійного прискорення
або постійного прискорення  .
.
4) Вплив у вигляді?-функції.
 ,
,  , (2.5)
, (2.5)
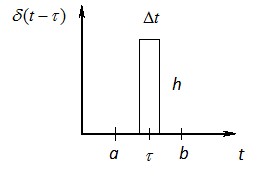
Рис.2.2
де h та  – амплітуда та тривалість імпульсу відповідно.
– амплітуда та тривалість імпульсу відповідно.
Для зсуненої  - функції (рис.2.2)
- функції (рис.2.2)
справедлива умова  .
.
Зображення за Лапласом:
 .
.  .
.
При́нципи регулюва́ння — у системах автоматичного регулювання.
Побудова апаратури керування і автоматичних систем основується на ряді загальних принципів регулювання, основні з яких такі:
· принцип регулювання за відхиленням,
· принцип регулювання за збуренням,
· принцип комбінованого регулювання,
· принцип адаптації.
Принцип автоматичного регулювання (керування) визначає, як і на основі якої інформації формувати керуючий вплив у системі. Однією з основних ознак, що характеризують принцип регулювання, є необхідна для вироблення керуючого впливу робоча інформація. Вибір принципу побудови автоматичної системи залежить від її призначення, характеру зміни задавальних і збурювальних впливів, можливостей отримання необхідної робочої інформації, стабільності параметрів керованого об'єкта і елементів керуючого пристрою і т.ін.
Принцип регулювання за відхиленням[ред. • ред. код]
При́нцип регулюва́ння за відхи́ленням
Якщо в автоматичній системі керуючий вплив виробляється на основі інформації про відхилення регульованої величини від заданого значення, то кажуть, що система побудована на основі принципу регулювання за відхиленням, або принципу зворотного зв'язку. Для реалізації цього принципу в регулюючому пристрої необхідно здійснювати порівняння дійсного значення регульованої величини із заданим значенням та управляти об'єктом в залежності від результатів цього порівняння.
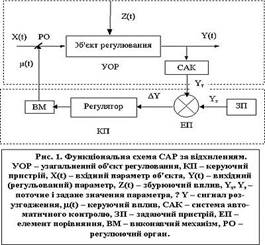
Приклад САР за відхиленням показано на рис. 1.
На схемі об'єкт керування (регулювання), регулюючий орган (РО) і система автоматичного контролю вихідного параметра (САК) об'єднані в окремий блок — узагальнений об'єкт регулювання (УОР). У свою чергу, регулятор, виконавчий механізм (ВМ), елемент порівняння (ЕП) і задаючий пристрій (ЗП) утворюють блок керування або керуючий пристрій (КП). Система автоматичного контролю вихідного параметра (САК) служить для автоматичного вимірювання абсолютного значення регульованої величини і вироблення сигналу її поточного значення (Yт).
Згідно з вимогами, що висуваються до систем контролю, вихідний сигнал вимірювального пристрою повинен бути пропорційним вимірюваній величині. Крім того, вихідний сигнал несе інформацію про напрям відхилення вимірюваної величини.
Елемент порівняння (ЕП) — елемент автоматики, що звичайно входить до складу регулятора, виробляє сигнал розузгодження ∆(y) (векторну різницю між поточним значенням регульованого параметра і заданим):
Δ(y) = Ym — Yз
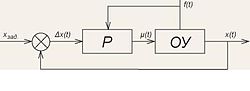
Робота представленої системи проста. При відхиленні регульованої величини від заданого значення на елементі порівняння формується сигнал розузгодження (за рівнянням), який після підсилення і перетворення за необхідним алгоритмом у регуляторі керує роботою виконавчого механізму.
Останній впливає на регулюючий орган, змінюючи значення вхідного сигналу доти, поки не зникне відхилення поточного значення регульованої величини від заданого, тобто до моменту виконання умови ΔY=0.
Принцип керування за відхиленням є універсальним і ефективним, оскільки він дозволяє враховувати всі впливи на об'єкт (всіх збурень і завад), управляти складними об'єктами, а також здійснювати необхідний закон зміни керованої величини з допустимо малим відхиленням (помилкою) незалежно від того, якими причинами воно викликане.
Однак, при великому транспортному запізненні об'єктів керування цей принцип може бути непридатним і САК буде нестійкою. Тобто, при швидкоплинних змінах вхідного збурення і фіксації їхнього наслідку (відхилення керованої величини) через порівняно тривалий проміжок часу керуючий вплив «не встигатиме» за збуренням (и), а в ряді випадків навіть погіршуватиме стан об'єкта керування.
Характерною рисою автоматичних систем, побудованих на основі принципу керування за відхиленням, є наявність контролю регульованої величини і головного зворотного зв'язку (ГЗЗ).Зворотний зв'язок в цьому випадку утворений керуючим пристроєм.
Принцип регулювання за збуренням[ред. • ред. код]
При́нцип регулюва́ння за збу́ренням
Принцип керування за збуренням, або принцип компенсації збурень, полягає в тому, що керуючий вплив у системі виробляється в залежності від результатів вимірювання збурення, що діє на об'єкт. Іншими словами, в даних системах керуючий вплив є функцією збурюючого впливу.
 Величина і знак керуючого впливу повинні бути такими, щоб повністю або значною мірою компенсувати вплив збурюючого впливу на об'єкт. Системи, побудовані за цим принципом, працюють за розімкненим колом, тобто не мають зворотного зв'язку.
Величина і знак керуючого впливу повинні бути такими, щоб повністю або значною мірою компенсувати вплив збурюючого впливу на об'єкт. Системи, побудовані за цим принципом, працюють за розімкненим колом, тобто не мають зворотного зв'язку.
На сьогодні принцип керування за збуренням у збагачувальній практиці застосовується рідко. Основна причина цього — складність, а часто і неможливість виміряти і врахувати всі збурення, що діють на об'єкт. Звичайно враховується дія лише одного або декількох найістотніших збурень, які вимірюються контролюючими пристроями.
Приклад реалізації САР за збуренням показано на рис. 1.
На представленій схемі не показані проміжні ланки — елемент порівняння і задаючий пристрій.
Принцип роботи схеми зрозумілий з рисунка. Особливість реалізації схеми — вибір каналу керування на об'єкті (Х(t)), здатного компенсувати вплив збурюючого впливу на вихідний параметр.
Основна перевага систем за збуренням — висока швидкодія кіл компенсації, оскільки система реагує безпосередньо на причину, а не на наслідок, тобто регулятор починає працювати в момент виникнення збурення на вході в об'єкт керування. Недолік розімкнутих САР — реакція тільки на основні збурення, які можна виміряти, і нереагування на завади (другорядні впливи).
При надходженні на об'єкт декількох основних збурень необхідно передбачати таке ж число локальних САР. Це суттєво ускладнює систему керування об'єктом. Тому розімкнуті системи застосовують у випадку наявності одного основного збурення і високого самовирівнювання об'єкта.
При́нцип комбіно́ваного регулюва́ння
Сучасні автоматичні системи високої точності звичайно будують на основі принципу комбінованого керування, що поєднує в собі принципи керування за відхиленням і за збуренням. При цьому в автоматичних системах комбінованого керування нарівні із замкненими контурами, що утворюються від’ємними зворотними зв’язками, є ланцюги компенсації основного збурюючого впливу Z(t) або додатковий ланцюг компенсації помилок від задаючого впливу. Подібні системи рекомендується застосовувати для керування об’єктами, які характеризуються наявністю істотних збурень, великою інерційністю і присутністю транспортного запізнення.
Принцип комбінованого керування вільний від недоліків САР за відхиленням і збуренням і поєднує їх переваги.
|
|
|
|
|
Дата добавления: 2015-05-08; Просмотров: 2274; Нарушение авторских прав?; Мы поможем в написании вашей работы!