КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Графік зведеної роботи сил корисного опору
|
|
|
|
Графік зведеної роботи сил корисного опору в функції кута повороту кривошипа  будуємо в наступній координатній системі, що розташована під графіком
будуємо в наступній координатній системі, що розташована під графіком  , методом графічного інтегрування графіка по куту повороту
, методом графічного інтегрування графіка по куту повороту  .
.
1. Вибираємо полюсну відстань ліворуч від початку координат графіка , наприклад, КО = 60 мм.
2. Площу, яка обмежена графіком інтегровної функції та осями координат ділимо на  рівних частин (у нашому прикладі на 12, як і коло кривошипа, вже
a. поділено по вісі ). Точки розподілу пронумеровані 0…12.
3. Кожну утворену ділянку замінюємо прямокутником, рівним за площею ділянці, що замінюється. Для цього на кожній ділянці інтегровної кривої знаходимо точку, через яку проводимо горизонтальну пряму так, щоб отримати рівні площі над кривою та під кривою.
4. Знайдену точку проектуємо на вісь ординат і з'єднуємо з полюсом інтегрування К. Полюсна відстань КО вибирається довільно, але в даному випадку рекомендується приймати 60...70 мм.
Примітка: Слід зауважити, що чим менш полюсна відстань КО, тобто, чим ближче полюс К, тим крутіше піде інтегральна крива.
5. На кожній ділянці (0-1, 1-2, 2-3 тощо) системи координат інтегральної кривої (в даному випадку графіка ) проводимо промінь, паралельний відповідному променю інтегровної функції (в даному випадку ), тобто на ділянці 0-1 паралельно 1-му променю, на 1-2 – паралельно 2-му і так далі. Одержану ламану лінію огинаємо плавною кривою – це і буде шукана інтегральна крива (в даному випадку – графік
6. Отже:
7. рівних частин (у нашому прикладі на 12, як і коло кривошипа, вже
a. поділено по вісі ). Точки розподілу пронумеровані 0…12.
3. Кожну утворену ділянку замінюємо прямокутником, рівним за площею ділянці, що замінюється. Для цього на кожній ділянці інтегровної кривої знаходимо точку, через яку проводимо горизонтальну пряму так, щоб отримати рівні площі над кривою та під кривою.
4. Знайдену точку проектуємо на вісь ординат і з'єднуємо з полюсом інтегрування К. Полюсна відстань КО вибирається довільно, але в даному випадку рекомендується приймати 60...70 мм.
Примітка: Слід зауважити, що чим менш полюсна відстань КО, тобто, чим ближче полюс К, тим крутіше піде інтегральна крива.
5. На кожній ділянці (0-1, 1-2, 2-3 тощо) системи координат інтегральної кривої (в даному випадку графіка ) проводимо промінь, паралельний відповідному променю інтегровної функції (в даному випадку ), тобто на ділянці 0-1 паралельно 1-му променю, на 1-2 – паралельно 2-му і так далі. Одержану ламану лінію огинаємо плавною кривою – це і буде шукана інтегральна крива (в даному випадку – графік
6. Отже:
7.  .
8. Примітка: На ділянках, де інтегровна функція дорівнює нулю, інтегральна крива йде паралельно вісі абсцис (тому що інтеграл від нуля – const). .
8. Примітка: На ділянках, де інтегровна функція дорівнює нулю, інтегральна крива йде паралельно вісі абсцис (тому що інтеграл від нуля – const).
|
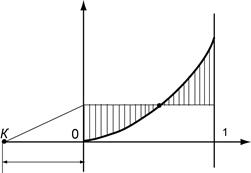 Рис. 3.4. До методу графічного інтегрування
Рис. 3.4. До методу графічного інтегрування
|
Визначаємо масштаб графіка роботи:

 =................................Дж/мм,
=................................Дж/мм,
де  - масштаб моменту,
- масштаб моменту,  ;
;  - масштаб кута повороту,
- масштаб кута повороту,  ; (КО) – полюсна відстань, мм. Перевіряємо розмірність:
; (КО) – полюсна відстань, мм. Перевіряємо розмірність:
 .
.
Робота сил корисного опору за цикл усталеного руху:
 ,
,
де  - максимальна ордината графіка в
- максимальна ордината графіка в
12-тому положенні (див. креслення...................................).
Примітка: дати посилання на шифр креслення, наприклад,  . .
|
3.10. Графік зведеної роботи рушійних сил
Відомо, що зведена робота рушійних сил дорівнює:
 .
.
Для будь-якої робочої машини (прес, насос, дробарка, верстат тощо) момент рушійних сил вважається сталою величиною, тоді графік зведеної роботи рушійних сил  являє собою прямопропорційну залежність від кута повороту кривошипу .
являє собою прямопропорційну залежність від кута повороту кривошипу .
Відомо також, що за законом збереження енергії за цикл усталеного руху:
 .
.
Тому з'єднуємо на графіку точки 0 і 12/ прямою та отримуємо графік зведеної роботи рушійних сил  .
.
3.11. Графік зведеного моменту рушійних сил
Для побудови графіка зведеного моменту рушійних сил  треба графічно продиференціювати графік зведеної роботи рушійних сил . Для цього з полюса К проведемо промінь, паралельний графіку , до перетину з віссю ординат, далі графік піде паралельно вісі абсцис (див. креслення..............................................).
треба графічно продиференціювати графік зведеної роботи рушійних сил . Для цього з полюса К проведемо промінь, паралельний графіку , до перетину з віссю ординат, далі графік піде паралельно вісі абсцис (див. креслення..............................................).
| Примітка: дати посилання на шифр креслення, наприклад, .
|
Визначаємо величину зведеного моменту рушійних сил:
 =............................Нм.
=............................Нм.
де  - ордината графіка (стала величина); - масштаб моменту, .
- ордината графіка (стала величина); - масштаб моменту, .
3.12. Графік суми робіт зведених моментів сил
Для побудови графіка суми робіт зведених моментів сил  (рис. 3.3,г) необхідно від ординат графіка відібрати ординати графіка , різниця і є , відповідний графік будуємо в тій же системі координат (див. креслення......................................).
(рис. 3.3,г) необхідно від ординат графіка відібрати ординати графіка , різниця і є , відповідний графік будуємо в тій же системі координат (див. креслення......................................).
| Примітка: дати посилання на шифр креслення, наприклад, .
|
3.13. Визначення моменту інерції маховика
Ураховуючи встановлені функціональні залежності ([2],
с. 21...25), визначаємо момент інерції маховика методом М.І.Мерцалова.
Теоретичне обґрунтування:
 ,
,
де  - приростання кінетичної енергії всієї машини, враховуючи маховик;
- приростання кінетичної енергії всієї машини, враховуючи маховик;
 - приростання кінетичної енергії ланок механізмів машини (без маховика);
- приростання кінетичної енергії ланок механізмів машини (без маховика);
 - приростання кінетичної енергії маховика.
- приростання кінетичної енергії маховика.
Для побудови графіка кінетичної енергії всієї машини  перебудовуємо в наступній координатній системі графік суми робіт
перебудовуємо в наступній координатній системі графік суми робіт  в масштабі, зручному і для зображення графіка
в масштабі, зручному і для зображення графіка  , значення якого на порядок менш, ніж значення графіка (тобто графік збільшуємо – масштаб
, значення якого на порядок менш, ніж значення графіка (тобто графік збільшуємо – масштаб  зменшуємо).
зменшуємо).
Значення графіка розраховуємо за формулою:
 ,
,
де  - середня кутова швидкість кривошипа, с-1;
- середня кутова швидкість кривошипа, с-1;
 ......................... с-1,
......................... с-1,
 - зведений момент інерції ланок, кгм2, визначається за графіком
- зведений момент інерції ланок, кгм2, визначається за графіком  для всіх 12-ти положень механізму (або за табл. 3.4).
для всіх 12-ти положень механізму (або за табл. 3.4).
 - зведений момент інерції ланок при нульовому значенні узагальненої координати (в нульовому положенні механізму).
- зведений момент інерції ланок при нульовому значенні узагальненої координати (в нульовому положенні механізму).  .
.
Значення для всіх 12-ти положень механізму наведені в табл. 3.6.
Таблиця 3.6.
Значення кінетичної енергії ланок механізму, Дж
|
| ... | ... | ... | ... | ... | ... | ... |
продовження табл. 3.6.
|
| ... | ... | ... | ... | ... | ... |
Відбираючи ординати графіка від кожної ординати графіка , отримуємо графік змінювання кінетичної енергії маховика  (див. креслення.......................................).
(див. креслення.......................................).
| Примітка: дати посилання на шифр креслення, наприклад, .
|
Позначимо точки максимального та мінімального значень графіка  відповідно літерами
відповідно літерами  і
і  , тоді момент інерції маховика
, тоді момент інерції маховика  , кгм2, можна визначити за формулою:
, кгм2, можна визначити за формулою:
 =......................................кгм2,
=......................................кгм2,
де  - масштаб графіків кінетичної енергії,
- масштаб графіків кінетичної енергії,  ;
;
 - коефіцієнт нерівномірності руху (за завданням);
- коефіцієнт нерівномірності руху (за завданням);  =...........
=...........
 - кутова швидкість ланки зведення (кривошипа), с-1.
- кутова швидкість ланки зведення (кривошипа), с-1.
|
|
|
|
|
Дата добавления: 2015-05-24; Просмотров: 1037; Нарушение авторских прав?; Мы поможем в написании вашей работы!