КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принцип разомкнутого управления
|
|
|
|
На рисунке 1 приведена принципиальная электрическая схема разомкнутой системы управления скоростью двигателя постоянного тока независимого возбуждения.
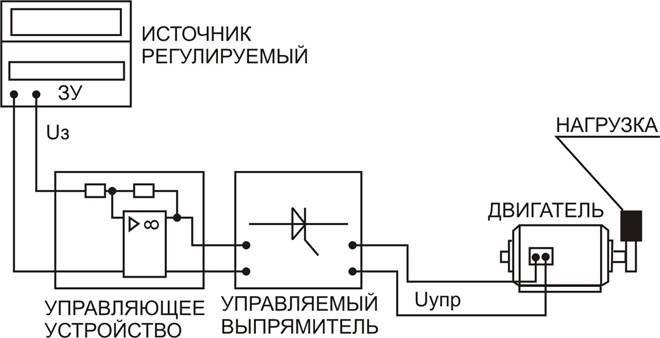
Рисунок 1. Принципиальная электрическая схема разомкнутой системы управления
Напряжение Uз задающего устройства, регулируемое по величине, поступает на вход управляющего устройства, представляющее собой операционный усилитель.
Усиленное напряжение поступает на вход управляемого выпрямителя, входной величиной которого является управляющее воздействие Uупр.
Управляющее воздействие поступает на двигатель и его величина определяет скорость вращения двигателя. Uупр. = f(Uз).
На рисунке 2 приведена функциональная схема разомкнутой системы.

Рисунок 2. Функциональная схема разомкнутой системы.
Источник регулируемый выполняет функцию задающего устройства (ЗУ). Выходной величиной задающего устройства является задающее воздействие Xз. Управляющее устройство выполняет функцию усиления (У). Управляемый выпрямитель выполняет функцию исполнительного элемента (ИЭ). Выходная величина исполнительного элемента – управляющее воздействие (Xупр.). Двигатель является объектом управления (ОУ). Скорость двигателя – выходная величина (Хвых.). Момент сопротивления на валу – возмущающее воздействие (F).
Функциональная схема имеет вид разомкнутой цепочки, в которой основное воздействие передается от входного элемента к выходному. Это и дало основание названию принципа.
Свойства систем автоматического управления оцениваются в установившемся и переходном режимах работы. Для сравнения систем управления, построенным по различным принципам достаточно рассмотреть их нагрузочные характеристики.
Нагрузочной характеристикой называется зависимость выходной величины объекта управления от возмущающего воздействия в установившемся режиме работы Хвых. = f(F).
Установившийся режим работы это такой режим, когда все величины и воздействия не изменяются во времени.
Нагрузочная характеристика разомкнутой системы автоматического управления — это нагрузочная характеристика объекта. Она не зависит от свойств управляющей части системы. Любое изменение возмущающего воздействия оказывает влияние на выходную величину системы управления. Несмотря на очевидные недостатки, этот принцип используется очень широко. Элементы, представляемые разомкнутой цепью, входят в состав любой системы. Нагрузочная характеристика представлена на рисунке 3.
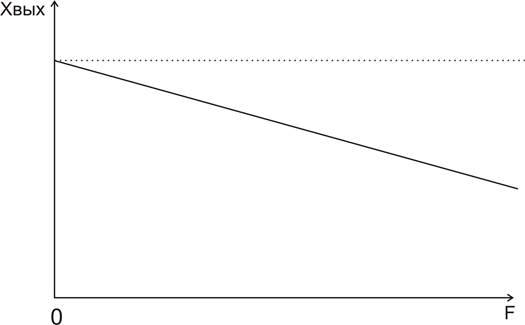
Рисунок 3. Нагрузочная характеристика разомкнутой системы автоматического управления
Принцип управления по возмущению (принцип компенсации)
В системах управления по возмущению измеряется возмущающее воздействие и величина, пропорциональная измеренному возмущению, подается на вход системы таким образом, чтобы уменьшить отклонение выходной величины.
На рисунке 4 приведена принципиальная электрическая схема системы автоматического кого управления скоростью двигателя постоянного тока независимого возбуждения.
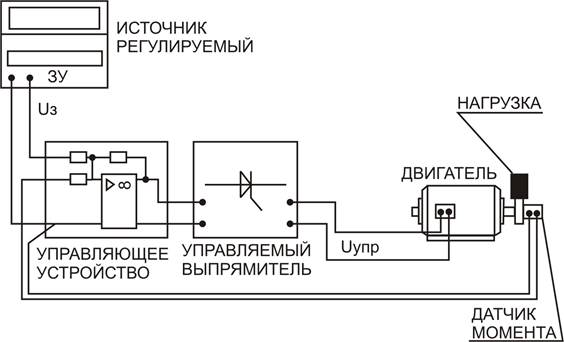
Рисунок 4. Принципиальная электрическая схема системы автоматического управления
С помощью датчика измеряется в воздействие (момент сопротивления) и напряжение датчика Uм подается на вход суммирующего усилителя. Напряжение на выходе суммирующего усилителя (Uy) пропорционально сумме за дающего напряжения и напряжения датчика момента. Uy = Ку (Uз + Km*Um)
Функциональная схема системы автоматического управления по возмущению приведена на рисунке 5.
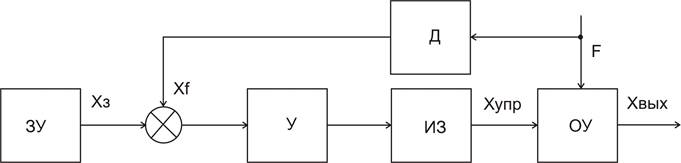
Рисунок 5. Функциональная схема
Достоинства системы управления по возмущению:
- в системе управления по возмущению можно получить любую нагрузочную характеристику;
- можно так подобрать параметры управляющей части, чтобы при изменении возмущающего воздействия выходная величина системы оставалась постоянной.
Это будет соответствовать случаю полной компенсации влияния возмущающего воздействия на выходную величину. Поэтому данный принцип управления носит второе название принцип компенсации.
Недостатки систем управления по возмущению:
1. На объект управления всегда действуют несколько возмущающих воздействий.
2. Трудность измерения возмущающих воздействий.
Эти недостатки существенно ограничивают область применения систем управления по возмущению. Нагрузочная характеристика представлена на рисунке 6.

Рисунок 6. Нагрузочная характеристика
Принцип обратной связи (регулирование по отклонению)
Систему можно построить и так, чтобы уменьшение влияний возмущений на выходную величину, обеспечивалось без измерения этих возмущений. Для этого нужно измерять саму выходную величину.
Схема замкнутой системы автоматического регулирования скорости двигателя постоянного тока приведена на рисунке 7.
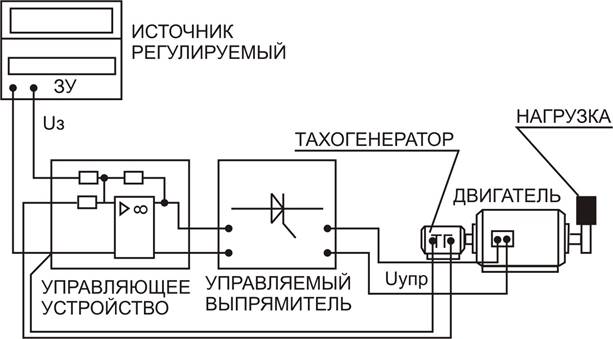
Рисунок 7. Схема замкнутой системы
Выходная величина — скорость двигателя измеряется и преобразуется в напряжение с помощью датчика — тахогенератора. Тахогенератор сочленен с валом двигателя. Напряжение тахогенератора пропорционально скорости вращения вала двигателя. Это напряжение называют напряжением обратной связи (Uoc.). Напряжение обратной связи подается на вход управляющего устройства, причем таким образом, чтобы оно вычиталось из задающего напряжения. Напряжение на выходе усилителя равно: Uу = Ky(Uз – Kc · Uoc.).
При изменении скорости двигателя, вызванном изменением нагрузки происходит автоматическое изменение напряжения на выходе усилителя и изменение управляющего напряжения. Автоматическое изменение управляющего напряжения обеспечивает уменьшение отклонения скорости от заданного значения.
Если скорость уменьшится, то разность Uз – Kc · Uoc. увеличится, а, следовательно, увеличится и управляющее воздействие Uyпp, поддерживая скорость на уровне близком к прежнему значению. Если же скорость увеличится, то разность Uз – Kc · Uoc. уменьшится, уменьшится управляющее воздействие Uynp, сдерживая увеличение скорости. Цепь, образованная датчиком выходной величины (тахогенератором), называется цепью обратной связи. Направление передачи воздействия в цепи обратной связи обратно направлению передачи основного воздействия на объект. Функциональная схема системы приведена на рисунке 8.
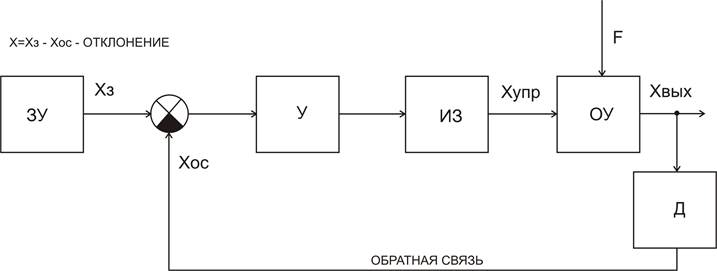
Рисунок 8. Функциональная схема системы
Функциональная схема имеет вид замкнутого контура. Системы управления с подобными функциональными схемами называются замкнутыми системами. Управляющее воздействие в замкнутой системе является функцией величины отклонения. Часто управляющее воздействие является не только функцией отклонения, но также его производных и интегралов. Управление в функции отклонения называется регулированием.
Замкнутая система называется системой автоматического регулирования.
Управляющее устройство называется автоматическим регулятором. Объект управления – объектом регулирования.
Обратная связь, охватывающая всю систему (когда выходная величина или ее часть вновь подается на вход), называется главной обратной связью. Внутри регулятора могут быть и другие обратные связи, называемые местными.
Если сигнал обратной связи вычитается из основного сигнала, то такая обратная связь называется отрицательной. Главная обратная связь в системах автоматического регулирования всегда отрицательная. Нагрузочная характеристика представлена на рисунке 9.
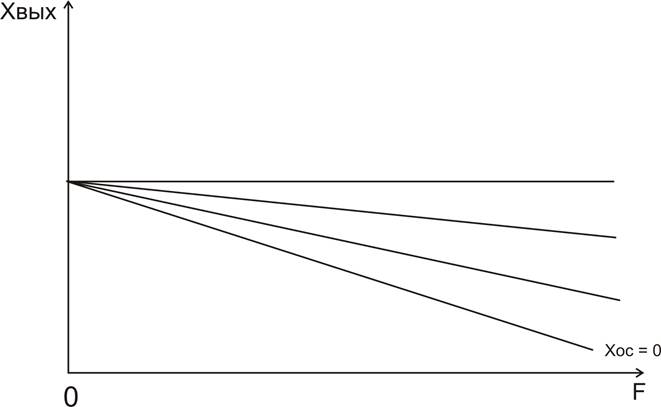
Рисунок 9. Нагрузочная характеристика
|
|
|
|
|
Дата добавления: 2015-05-09; Просмотров: 1559; Нарушение авторских прав?; Мы поможем в написании вашей работы!