КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принцип комбинированного управления
|
|
|
|
Принцип комбинированного управления заключается в регулировании по возмущению и отклонению. Комбинированные регуляторы объединяют достоинства обоих принципов — быстроту реакции на изменение возмущений и точное регулирование независимо от того, какая причина вызвала отклонение.
Схема комбинированной системы автоматического регулирования скорости двигателя постоянного тока приведена на рисунке 10.
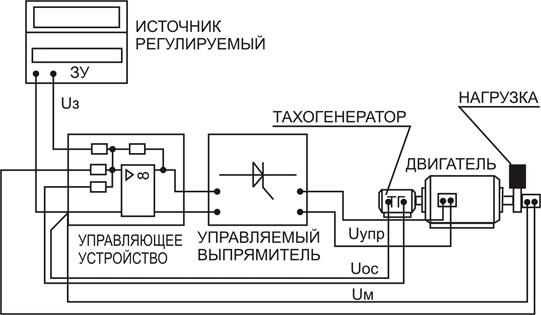
Рисунок 10. Схема комбинированной системы
Функциональная схема системы приведена на рисунке 11.
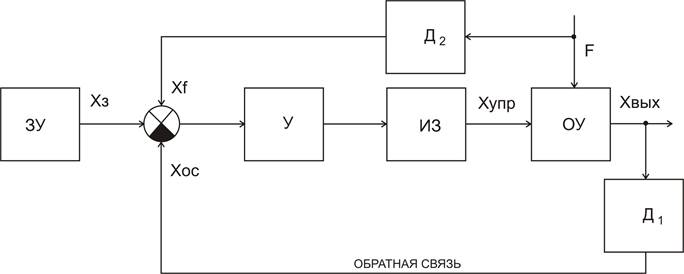
Рисунок 11. Функциональная схема
Нагрузочная характеристика изображена на рисунке 12.
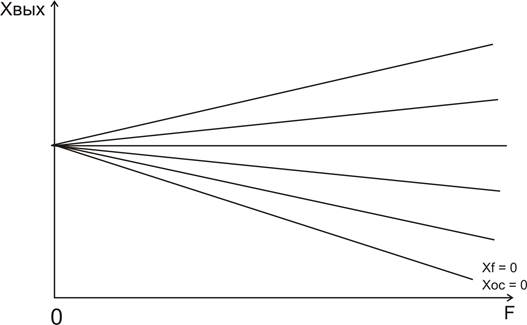
Рисунок 12. Нагрузочная характеристика
Описание модели лабораторного стенда
Модель лабораторного стенда позволяет выполнить исследования следующих типов систем управления:
1. Разомкнутой системы управления.
2. Разомкнутой системы автоматического управления по возмущению.
3. Замкнутой системы автоматического регулирования
(системы регулирования по отклонению).
4. Комбинированной системы автоматического регулирования,
В качестве объекта управления (регулирования) используется модель двигателя постоянного тока независимого возбуждения.
Модель лабораторного стенда содержит:
- модель управляющего устройства;
- модель управляемого выпрямителя;
- модель двигателя постоянного тока;
- датчик скорости (тахогенератор ТГ);
- датчик момента сопротивления на валу двигателя;
- задающее устройство ЗУ;
- осциллограф;
- амперметр, показывающий ток двигателя;
- прибор, показывающий скорость двигателя об/мин.
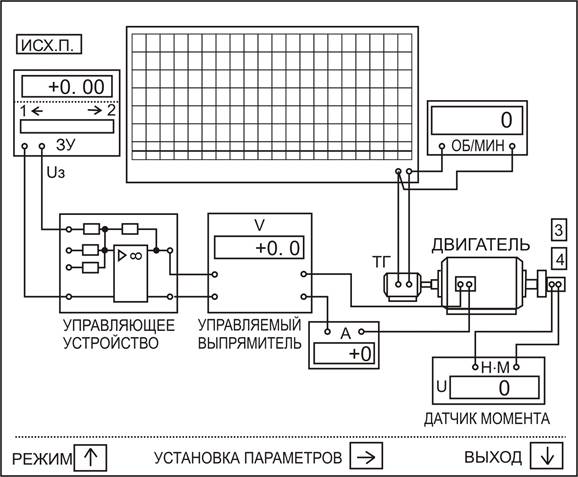
Рисунок 13. Схема модели лабораторного стенда
УПРАВЛЯЮЩЕЕ УСТРОЙСТВО
Управляющим устройством является суммирующий усилитель.
Выходное напряжение усилителя ограничено величиной 12 В.
Коэффициент усиления усилителя Ку может быть установлен в пределах от 1 до 10.
Выход усилителя подключен ко входу управляемого выпрямителя.
УПРАВЛЯЕМЫЙ ВЫПРЯМИТЕЛЬ
Управляемый выпрямитель является инерционным элементом с коэффициентом усиления равным 25. Контроль за напряжением выпрямителя осуществляется с помощью встроенного вольтметра. К выходу выпрямителя подключен двигатель постоянного тока.
В исследуемых системах управляемый выпрямитель выполняет функцию исполнительного элемента.
ДВИГАТЕЛЬ
Двигатель постоянного тока независимого возбуждения является объектом управления (регулирования).
Ток двигателя контролируется с помощью амперметра.
Нагрузка двигателя (момент сопротивления на валу) может изменяться.
Для изменения момента следует нажимать клавиши 3 и 4
Номинальная скорость вращения двигателя 1500 об/мин.
ДАТЧИК СКОРОСТИ (ТГ)
Датчик скорости является тахогенератор. Скорость вращения двигателя преобразуется с помощью тахогенератора в напряжение.
Прибор, расположенный справа от осциллографа, показывает величину скорости вращения двигателя.
ДАТЧИК МОМЕНТА
Момент сопротивления на валу двигателя измеряется с помощью датчика и преобразуется в электрический сигнал-напряжение
Прибор датчика показывает величину момента сопротивления в НМ.
В левой части прибора расположены клеммы (u), напряжение на которых пропорционально моменту сопротивления.
ЗАДАЮЩЕЕ УСТРОЙСТВО ЗУ
Задающее устройство представляет собой источник регулируемого напряжения.
Изменение напряжения на выходе ЗУ осуществляется нажатием клавиш 1 и 2. Вольтметр задающего устройства показывает величину установленного напряжения (задающего напряжения Uз).
Задающее напряжение подается на первый вход управляющего устройства.
Скорость двигателя устанавливается в соответствии с установленной величиной задающего напряжения.
ОСЦИЛЛОГРАФ
Осциллограф предназначен для наблюдения за изменением скорости двигателя в процессе работы исследуемых систем управления.
Развертка осциллографа включается в режиме (РАБОТА).
В нижней части экрана осциллографа наносятся отметки времени.
Интервал между метками равен 1 секунде. Интервал между метками зависит от типа компьютера и может быть иным.
С помощью временных меток можно определить время переходного процесса.
Режимы:
- ИСХОДНОЕ ПОЛОЖЕНИЕ
- РАБОТА
- УСТАНОВКА ПАРАМЕТРОВ
Индикатор режимов расположен в левом верхнем углу экрана дисплея.
Переход из режима (ИСХОДНОЕ ПОЛОЖЕНИЕ) в режим (РАБОТА) и обратно осуществляется нажатием клавиши ↑.
Режим (РАБОТА)
В режиме (РАБОТА) выполняется исследование систем автоматического управления.
Режим (ИСХОДНОЕ ПОЛОЖЕНИЕ < ИСХ. П.>)
Режим (ИСХОДНОЕ ПОЛОЖЕНИЕ) предназначен для установки величины задающего напряжения Uз.
Напряжение Uз устанавливается нажатием клавиш 1 и 2.
Нажатием на клавиши 3 и 4 можно установит величину момента сопротивления на валу двигателя.
Из режима (ИСХОДНОЕ ПОЛОЖЕНИЕ) можно перейти в режим УСТАНОВКА ПАРАМЕТРОВ) нажатием клавиши  .
.
Режим (УСТАНОВКА ПАРАМЕТРОВ)
Этот режим предназначен для установки параметров управляющего устройства (параметров операционного усилителя).
При исследовании разомкнутой системы управления скоростью двигателя нажатием на клавишу 1 можно установить коэффициент усиления усилителя Ку в пределах от 0 до 10. Начальное значение Ку равно единице.
В системе управления по возмущению, напряжение, пропорциональное моменту сопротивления суммируется с задающим напряжением.
При исследовании такой системы клавишей 1 устанавливается коэффициент усиления усилителя Ку в пределах от 1 до 10.
Нажатием на клавишу 2 устанавливается коэффициент связи по возмущающему воздействию (моменту сопротивления) Км в пределах от 0,1 до 0,5.
Начальные значения: Ку=1; Км=0,1.
При исследовании комбинированной системы автоматического регулирования скорости двигателя клавишей 1 устанавливается коэффициент усиления усилителя Ку в пределах от 1 до 10.
Нажатием на клавишу 2 устанавливается коэффициент связи по возмущающему воздействию (моменту сопротивления) Км в пределах от 0,01 до 0,05.
Нажатием на клавишу 3 устанавливается коэффициент обратной связи по скорости Кс в пределах от 0,1 до 0,5.
Начальные значения: Ку=1; Кс=0,1; Км=0,01.
Порядок выполнения работы:
1. Исследование разомкнутой системы.
а) Установить Ку=1, Uз=8,8 В, М=0 НМ.
Перейти в режим (РАБОТА) и наблюдать процесс разгона двигателя при моменте сопротивления равном нулю, т.е. на холостом ходу.
Зарисовать кривую изменения скорости двигателя. По окончании переходного процесса записать значение скорости.
Нажимая на клавишу 3 установить величину момента сопротивления равной 100 НМ.
После окончания переходного процесса записать новое значение скорости.
Вычислить уменьшение скорости, вызванное увеличением момента от 0 до 100 НМ.
б) Установить Ку=5, Uз=1,8 В, М=0 НМ.
Повторить процесс разгона двигателя, а затем изменить момент сопротивления от 0 до 100 НМ. Записать значения скорости при М=0 НМ и при М=100 НМ. Вычислить уменьшение скорости.
в) Установить Ку=10, Uз=0,8 В, М=0 НМ. Исследование повторить. По результатам исследований построить нагрузочные характеристики разомкнутой системы.
2. Исследование системы управления по возмущению.
Выполнить исследования аналогично исследованиям разомкнутой системы управления для следующих случаев:
а) Ку=1, Км=0,1, Uз=8,8 В;
б) Ку=1, Км=0,3, Uз=8,8 В;
в) Ку=1, Км=0,5, Uз=8,8 В;
г) Ку=2, Км=0,1, Uз=4,4 В;
По результатам исследований построить нагрузочные характеристики системы управления по возмущению.
3. Исследование разомкнутой системы автоматического регулирования.
Выполнить исследования аналогично исследованиям разомкнутой системы управления для следующих случаев:
а) Ку=1, Кс=0,1, Uз=9,8 В;
б) Ку=2, Кс=0,2, Uз=4,6 В;
в) Ку=5, Кс=0,3, Uз=4,8 В;
г) Ку=10, Кс=0,5, Uз=6,0 В;
По результатам исследований построить нагрузочные характеристики замкнутой системы автоматического регулирования.
4. Исследование комбинированной системы автоматического регулирования.
Выполнить исследования для следующих случаев:
а) Ку=1, Кс=0,1, Км=0,01, Uз=9,8 В;
б) Ку=2, Кс=0,1, Км=0,05, Uз=9,8 В;
в) Ку=5, Кс=0,3, Км=0,01, Uз=4,8 В;
г) Ку=5, Кс=0,3, Км=0,05, Uз=4,8 В;
По результатам исследований построить нагрузочные характеристики комбинированной системы автоматического регулирования.
Сформулировать выводы о достоинствах и недостатках исследованных систем управления.
Содержание отчета
1. Название работы.
2. Цель работы.
3. Краткие теоретические положения.
4. Результаты исследований.
5. Нагрузочные характеристики.
6. Выводы.
Контрольные вопросы
1. Что такое управляющее воздействие.
2. Цель работы.
3. Порядок выполнения работы.
4. Описание виртуального лабораторного стенда.
5. Что такое функциональная схема. Назначение входящих в нее элементов.
6. Рассказать работу принципиальной электрической схемы разомкнутой системы управления.
7. Пояснить рисунок 2.
8. Нагрузочная характеристика разомкнутой системы автоматического управления.
9. В чем заключается работа системы автоматики по принципу компенсации.
10. Рассказать работу принципиальной электрической схемы по принципу компенсации.
11. Пояснить рисунки 5 - 12
4. Клюев А.С. Автоматическое регулирование. – 2-е изд., перераб. И доп.- М.: Энергия, 1973.
5. Клюев А.С., Глазов Б.В., Дубровский А.Х. Проектирование систем автоматизации технологических процессов/ Под ред. А.С. Клюева. – М.: Энергия, 1980. -511 с.

© Тематический план БГИТА 2009 г. Изд. № ___ Бесплатно
Формат 60×84 1/16. Объем ____ п.л. Тираж 50 экз.
Брянская государственная инженерно-технологическая академия
БГИТА
241037, г. Брянск, пр. Ст. Димитрова, 3. Редакционно-издательский отдел.

|
|
|
|
|
Дата добавления: 2015-05-09; Просмотров: 4604; Нарушение авторских прав?; Мы поможем в написании вашей работы!