КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Установки ракетно-бомбардировочного вооружения
|
|
|
|
Л у к и н Александр Сергеевич
С а з о н о в Дмитрий Владимирович
Сазонов. Д.В., Лукин А.С.Установки ракетно-бомбардировочного вооружения. часть 1: Балочные держатели: Учебное пособие/Самар. Гос. Аэрокос. ун-т. Самара, 2003. с.
ISBN
В учебном пособии излагаются общие сведения об установках ракетно-бомбардировочного вооружения, даётся краткая характеристика и классифи-кация держателей.
Рассматривается назначение, конструкция, принцип действия балочных держателей БД3-УМК, МБД3-У2Т-1, МБД2-67У, правила соблюдения мер бе-зопасности при работе с ними.
Учебное пособие предназначено для студентов, обучающихся по дисцип-лине «Эксплуатация и ремонт АВ», составлено в соответствии с программой ВУС 461100.
Печатается по решению редакционно-издательского совета Самарского государственного аэрокосмического университета имени академика С.П.Королёва
Рецензент: В.М. Воскресенский
Учебное издание
ЧАСТЬ 1: БАЛОЧНЫЕ ДЕРЖАТЕЛИ.
Учебное пособие
Самарский государственный аэрокосмический
университет им. академика С.П.Королёва
443086 Самара, Московское шоссе, 34.
СОДЕРЖАНИЕ
Список сокращений………………………………………………………………. 6
Введение…………………………………………………………………………… 7
1. Общие сведения об установках ракетно-бомбардировочного вооружения
1.1.Назначения, классификация и состав держателей……………………. 8
2. Балочный держатель БД3-УМК
2.1. Назначения и основные технические данные………………………… 11
2.2. Устройство и работа……………………………………………………. 12
2.2.1. Балка……………………………………………………………….. 15
2.2.2. Ухват……………………………………………………………….. 15
2.2.3. Механизм подъёма СГШР………………………………………... 16
2.2.4. Блок выключателей……………………………………………….. 16
2.2.5. Механизм переключения…………………………………………. 17
2.2.6. Прибор управления ПУС-36-71………………………………….. 17
2.2.7. Замок Д3-УМ……………………………………………………… 18
2.2.8. Работа балочного держателя……………………………………... 22
3. Многозамковый балочный держатель МБД3-У2Т-1
3.1. Назначения и основные технические данные………………………… 24
3.2. Устройство и работа……………………………………………………. 25
3.2.1. Балка……………………………………………………………….. 25
3.2.2. Замок Д3-У1А…………………………………………………...… 27
3.2.3. Механизм подачи импульса МПИ-155………………………….. 31
3.2.4. Механизм ВЗРЫВ-НЕВЗРЫВ МВН-66…………………………. 32
3.2.5. Блок МПИ и МВН………………………………………………… 34
3.2.6. Блок предохранительных выключателей………………………... 35
3.2.7. Работа балочного держателя……………………………………... 35
4. Многозамковый балочный держатель МБД2-67
3.1. Назначение и состав………………………………………………… 38
3.2. Замок МБД2-67У……………………………………………………. 40
3.3. Работа балочного держателя……………………………………….. 41
3.4. Основные эксплуатационные данные МБД2-67У………………... 43
5. Указания по технике безопасности………………………………………… 44
Список используемых источников……………………………………………….. 45
СПИСОК СОКРАЩЕНИЙ
ЛА – летательный аппарат;
КАВ – комплекс авиационного вооружения;
АВ – авиационное вооружение;
УРБВ – установка ракетного и бомбардировочного вооружения;
БД – балочный держатель;
МБД – многозамковый балочный держатель;
МПИ – механизм подачи импульса;
МВН – механизм ВЗРЫВ-НЕВЗРЫВ;
ПУС – прибор управления;
ЭПУ – электропиротехническое взводящее устройство;
ПВУ – прутковое взводящее устройство;
МБС – механизм блокировки и сигнализации;
БВ – блок выключателей;
АПУ – пусковое устройство;
ППЛ-Т – пиропатрон;
АСП – авиационное средство поражения;
СУВ – система управления вооружением;
МПО – механизм принудительного отделения;
ВВЕДЕНИЕ
В состав авиационного вооружения (АВ) самолетов входят средства пора-жения, прицельные системы, установки ракетного и бомбардировочного воору-жения (УРБВ), системы управления вооружением. Совокупность находящихся на самолете средств поражения и систем, обеспечивающих их целенаправлен-ное применение, называется комплексом авиационного вооружения (КАВ).
Под УРБВ принято понимать комплекс устройств и агрегатов, предназна-ченных для выполнения следующих операций: загрузки АСП на ЛА и надежно-го их закрепления, обеспечения необходимых условий транспортировки АСП, обеспечения надежного и безопасного отделения АСП от ЛА.
Для выполнения перечисленных операций в состав УРБВ входят: механиз-мы загрузки АСП на ЛА, агрегаты подвески АСП, система обеспечения необхо-димых условий транспортировки АСП, агрегаты и механизмы подготовки к от-делению АСП от ЛА, механизмы отделения АСП от ЛА.
Агрегаты подвески АСП являются основными силовыми элементами УРБВ, предназначенные для того, чтобы воспринимать нагрузки от АСП и передавать их силовым узлам ЛА. Конструктивно агрегаты подвески выполняются в виде держателей, пусковых и катапультных устройств. Принципиальное отличие между различными типами агрегатов подвески состоит прежде всего в способе отделения АСП от ЛА.
В данном учебном пособие представлены установки бомбардировочного во-оружения выполненные в виде балочных держателей(БД3-УМК,МБДЗ-У2Т-1, МБД2-67У).
1. ОБЩИЕ СВЕДЕНИЯ ОБ УСТАНОВКАХ РАКЕТНО-БОМБАРДИРОВОЧНОГО ВООРУЖЕНИЯ.
1.1. Назначение, классификация и состав держателей.
Держателями принято называть такие агрегаты подвески, с которых СП отделяются либо свободно, т. е. под действием лишь массовых и аэродинами-ческих сил, либо принудительно, когда к двум указанным силам добавляется усилие специального привода, сообщающего АСП некоторый импульс количес-тва движения. На держатели подвешиваются такие АСП, которые отделяются от ЛА без запуска двигателя. Роль механизма отделения в держателе играет замок.
Держатели классифицируются по месту расположения на ЛА, конструкти-вной схеме, количеству подвешиваемых СП и грузоподъёмности.
По месту расположения на ЛА принято выделять держатели наружной и внутренней подвески. По конструктивной схеме держатели делятся на балоч-ные, кассетные и ящичные.
Балочными называются держатели, основу конструкции которых состав-ляет силовая балка. Внутри такой балки размещаются составные части самого держателя и других компонентов установки и системы управления вооружени-ем (СУВ). Балочные держатели рассчитываются на подвеску одного или нес-кольких СП.
Основу конструкции ящичного держателя составляет силовой контейнер, внутри которого располагаются СП малого калибра.
По грузоподъёмности держатели делятся на группы, определяемые по наи-большей массе каждого из подвешенных СП. Группа и конструктивная схема держателя обозначаются в его названии. Например, БД3, МБД2 означают соот-ветственно балочный держатель третьей группы и многозамковый балочный держатель второй группы.
В большинстве случаев балочные держатели крепятся к ЛА неподвижно и являются базовыми агрегатами подвески. На них подвешиваются не только СП, но и другие типы агрегатов подвески, главным образом пусковые устройства. Узлы крепления пусковых устройств к балочному держателю должны обеспе-чивать при этом выполнение двух основных требований: надёжное закрепление пускового устройства на держателе, надёжное и безопасное отделение пусково-го устройства от держателя в аварийных ситуациях.
Устройства стабилизации предназначены для предотвращения возможного перемещения СП. На балочных держателях они выполнены в виде ухватов с упорами.
АСП крепится на БД с помощью замков. Замками принято называть такие механизмы, с которых АСП отделяются свободно или принудительно. Основ-ными силами, обеспечивающими отцепку АСП от замка, являются аэродинами-ческая сила, сила тяжести и усилие механизма принудительного отделения. За-мок открывается в результате воздействия усилия со стороны специального ус-тройства – приводка замка.
Замки классифицируются по ряду признаков: по способу крепления к дер-жателю, по грузоподъёмности и числу несущих рычагов.
По способу крепления к держателю различают замки съёмные и несъём-ные. Такие названия замки получают в зависимости от того, как происходит подвеска АСП: при снятых или неснятых с держателя замках. Съёмные замки обозначаются сокращенно обычно тремя буквами «Дер», тогда как в обозначе-нии несъемных замков содержаться либо две буквы - «БД», либо одна буква – «Д».
По грузоподъёмности замки подразделяются на группы максимально воз-можной массе подвешиваемых СП. Номер группы указывается в обозначении замка.
По числу несущих рычагов замки могут быть одно-, двух-, трёх- и четы-рёхрычажные. Число несущих рычагов замка определяется числом и распо-ложением узлов крепления СП и пусковых устройств. База между несущими рычагами замков соответствует базе между узлами крепления СП и пусковых устройств.
Конструкция замка определяется его типом. Механизм замка может быть условно подразделён на две части: несущую и запирающую (или спусковую).
Принцип работы любого замка сводится к следующему. Под действием ко-манды, поступающей от системы управления отделения СП, привод замка вы-рабатывает определённое усилие S*, который прикладывается к спусковому штоку замка. Спусковой шток, преодолевая усилие пружины замка и силы, дей-ствующей со стороны СП, перемещает спусковой рычаг, при этом освобожда-ется опорный рычаг, и замок открывается, после чего благодаря действию мас-совых и аэродинамических сил (при свободном отделении) и усилию со сторо-ны механизма принудительного отделения (при принудительном отделении) происходит отцепка СП от замка.
В корпусе замка размещаются механизмы системы управления взведением взрывателей АСП, датчики сигнализации наличия АСП и устройства блокиров-ки цепей сбрасывания АСП. Когда агрегат подвески предназначен для принуди-тельного отделения АСП, в состав замка входит механизм принудительного от-деления.
Привод замка, осуществляющий его открывание, может находиться внутри замка, как это сделано в замках несъёмного типа.
Приводы замков предназначены для усилия, под действием которого про-исходит открывание замков.
Всякий привод представляет собой совокупность двух составных частей: источника энергии с преобразователем и устройства спуска. При необходимос-ти открыть замок по команде, поступающей от системы управления отделением АСП, срабатывает устройство спуска. Благодаря этому энергия источника преобразуется в кинетическую энергию выходного звена привода и передаётся через него на спусковой шток или непосредственно на спусковой рычаг замка.
По типу источника энергии приводы могут быть электромагнитными, гид-равлическими, пневматическими, пиротехническими и пружинными.
Пиротехнические приводы в качестве источника энергии содержат пиро-состав. Воспламенитель выполняет роль устройства спуска. Достоинством пи-ротехнического привода является простота конструкции, большое быстродей-ствие и возможность достижения значительных усилий на выходном звене. Недостатком таких приводов следует признать неудобство в эксплуатации, а также повышенные требования к безопасности.
Механизмом принудительного применения (МПО) называется устройство, которое путём приложения сил отталкивания сообщает АСП заданные началь-ные условия отделения от ЛА. Основное назначение принудительного отделе-ния – обеспечение надёжного и безопасного отделения АСП от ЛА. Кроме того, принудительное отделение в ряде случаев способствует уменьшению рассеива-ния АСП.
По своей конструктивной схеме МПО могут быть весьма разнообразными. Однако любой МПО имеет в своём составе источник энергии, преобразователь энергии, устройство спуска и выходные звенья.
Из всех возможных типов МПО наибольшее распространение получили пиротехнические МПО катапультного типа с одним и двумя толкателями.
Принцип работы такого МПО прост. При подаче электрического тока в электрозапал срабатывает пиросостав, и образуются газы. Эти газы приводят в действие преобразователь и выходное звено.
2. БАЛОЧНЫЙ ДЕРЖАТЕЛЬ БД3-УМК
2.1. Назначение и основные технические данные.
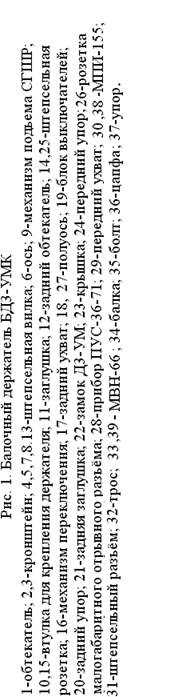
Балочный держатель БД3-УМК (рис. 1) предназначен для применения на самолете в качестве устройства для наружной подвески, транспортирования и сбрасывания грузов калибром от 50 до 500 кг, корректируемых авиационных бомб КАБ-500, а также применение пусковых устройств, блоков НАР и других изделий. Держатели взаимозаменяемы по местам установки и крепления на са-молете.
Технические данные
Балочный держатель обеспечивает:
а) применение одного из следующих грузов:
- груза калибром от 50 до 500 кг;
- зажигательного бака;
- пускового устройства типа АПУ-68УМ, АПУ-60-1ДБ;
- блоков УБ-32, Б-8М, Б-13Л;
- корректируемых АБ типа КАБ-500;
- многозамкового балочного держателя МБД2-67У;
- гондолы СППУ-22;
- контейнера мелких грузов КМГУ;
б) тактическое и аварийное сбрасывания грузов на ВЗРЫВ или НЕВЗРЫВ
с принудительным отталкиванием, пуск изделий;
в) аварийное сбрасывание пусковых устройств и блоков, МБД2-67У,
СППУ-22, КМГУ;
г) подачу напряжения на механизмы МПИ-155 после открывания замка
Д3-УМ;
д) переключение цепей механизма МБС замка Д3-УМ при подвеске грузов
на держатель и после сбрасывания или снятия груза;
е) переключение цепей механизмом переключения при подвеске на
держатель блоков УБ-32, Б-8М, Б-13Л, держателя МБД2-67У и
контейнера КМГУ, а также после снятия или сбрасывания последних;
ж) сброс подвешенных грузов на земле от ручного управления;
з) держатель работоспособен:
- при напряжении питания в цепи
тактического управления……………………………………….……27в:
- при напряжении питания в цепи
аварийного управления ………………………………………….…..20в;
Масса держателя……………………………………………………….….55 кг;
Габариты держателя с ухватом………………………………….1832х344х252
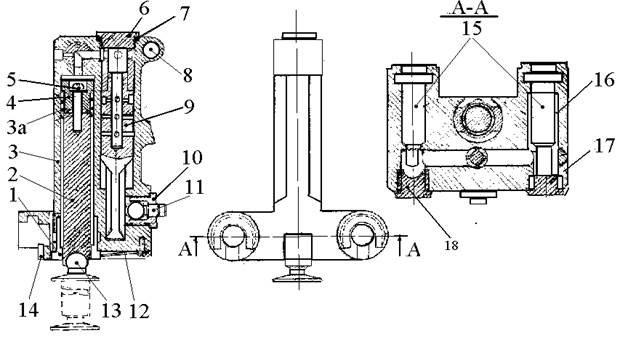
2.2. Устройство и работа
Балочный держатель БД3-УМК (рис. 1) представляет собой балку (34), на которой смонтированы: замок Д3-УМ (22), служащий для подвески и сбрасы-вания грузов, механизм подъёма СГШР (9), блок выключателей (19), механизм переключения (16),прибор управления ПУС-36071 (28), обтекатель (1), задний обтекатель (12), кронштейны с механизмом МПИ-155 (30, 38) и механизмом МВН-66 (33, 39). Механизмы МВН-66 и МПИ-155 обеспечивают соответствен-но механическое и электропиротехническое взведение как головных так и дон-ных устройств срабатывания грузов, сбрасываемых с держателя. Описания МПИ-155 и МВН-66 представлены в подразделениях 3.2.3. и 3.2.4.
Держатель укомплектован съёмными элементами: передним ухватом (29), задним ухватом (17), крышкой (23), задним упором (20),передним упором (24), заглушкой (21).
Держатель крепиться на самолете при помощи втулок (10, 15), в которые устанавливаются шкворни, комплектуемые с самолётом. Для крепления держа-теля под фюзеляжем самолёта шкворни устанавливаются в передние и задние втулки с базовым расстоянием 960 мм. Для крепления держателя под плоскос-тью самолёта шкворни устанавливаются в передние и средние втулки с базо-вым расстоянием 760 мм. Отверстия неиспользуемых втулок закрываются заглушкой (11).
В средней части балки с двух сторон закреплены по две цапфы (36) для крепления кронштейна системы подъёма грузов.
Электропроводка держателя собрана в жгут, закрепленный на правой пане-ли внутри балки.
Внутри держателя жгут имеет ряд ответвлений для подвода электропита-ния к замку Д3-УМ, прибору ПУС-36-71, механизмам МПИ-155 и МВН-66, блоку выключателей, механизму переключения. Кроме того, ответвления от жгута выведены к разъёмам:
- вилкам (4, 5, 7, 8 и 13), служащим для стыковки с ответными розет-ками жгутов бортсети самолёта;
- розетке (25), предназначенной для стыковки с разъёмами пусковых устройств, блоков НАР, держателя МБД2-67У и контейнера КМГУ;
- розетке отрывного разъёма (26), служащей для стыковки с разъёмом спецгруза;
- розетке (31), предназначенной для стыковки с разъёмами КАБ-500 или гондолы;
- розетке (14)-для стыковки с разъёмом жгута контрольного прибора типа ПК-68М, при проверке исправности цепей сбрасывания держа-теля.
На обеих сторонах держателя красной эмалью нанесены эксплуатацион-ные надписи и знаки, приведенные на рис.2




2.2.1. Балка
Балка (рис. 1) выполнена из двух панелей, соединенных между собой бол-тами. В передней части балки закреплен кронштейн с установленными на нем механизмами МПИ-155 (30) и МВН-66 (33). К заднему торцу балки прикреплен кронштейн для установки механизмов МПИ-155 (38) и МВН-66 (39). В перед-ней части балки закреплены прибор ПУС-36-71 (28) и механизм подъёма СГШР (9). Передние и задние концы балки закрываются обтекателями (1, 12). Для под-ступа к механизму МПИ-155 со стороны обтекателя (1) носок обтекателя сде-лан съёмным. Для обеспечения сохранности носок соединен с держателем тро-сом (32).
Для доступа к механизмам МПИ-155 (38) и МВН-66 (39) со стороны задне-го обтекателя (12) в нем имеются люки. Через люки заднего обтекателя обеспе-чивается также стыковка жгута самолета с разъёмом (13) и доступ к розетке(14) контрольного штепсельного разъёма.
Для подвески держателя на самолет в балке выполнены три сквозных отве-рстия: переднее, среднее и заднее, в которых закреплены втулки (9, 15). Отвер-стия средних и задних втулок овальные, чем обеспечивается удобство установ-ки держателя на узлы подвески самолета.
В средней части балки крепиться замок Д3-УМ.
Для исключения возможности раскачивания груза, подвешенного на дер-жатель, в гнезда балки устанавливаются съемные ухваты с регулируемыми упорами: передний (29) и задний (17). Ухваты устанавливаются в различных сочетаниях, в зависимости от типа подвешиваемого груза, и крепятся на балке полуосями (18) с лыской. Для установки полуоси в открытое или закрытое по-ложение необходимо надавить отверткой на стопор, что дает возможность по-вернуть полуось в требуемое положение. При опускании стопора он занимает исходное положение. В закрытом или открытом положении полуоси стопор должен быть заподлицо с поверхностью панели балки. Утопание стопора ука-зывает на промежуточное положение полуоси.
Свободные гнезда балки закрываются крышками. Заглушка (21) и задний упор (20) крепятся на балке полуосями (18). Передний упор (24) и крышка (23) крепятся полуосью (27). Задний (20) и передний (24) упоры устанавливаются при подготовке держателя к подвеске пускового устройства, СППУ-22, КМГУ, блоков НАР или МБД2-67У.
 2.2.2. Ухват
2.2.2. Ухват
Передний ухват (рис.3) представляет собой кронштейн, на каждой консоли (1) которого имеется по три резьбовых отверстия. В отверстия ввинчиваются упоры (4), около отверстий нанесены надписи, указывающие калибр или тип
груза, определяющий установку упоров.

Рис. 3. Передний ухват балочного держателя БД3-УМК
1-консоль; 2-корпус; 3-шайба; 4-упор; 5-гайка; 6-жолоб.
Оба упора ввинчиваются в отверстия консолей с аналогичными надписями и контрятся гайками (5).
В отличие от переднего ухвата, на заднем ухвате имеется два дополнитель-ных отверстия под упоры с надписями МБД.
В остальном устройство ухватов аналогично.
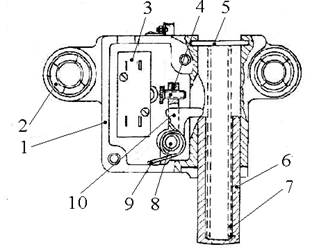
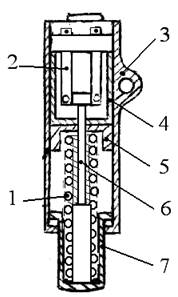
2.2.3. Механизм подъёма СГШР.
 Механизм подъёма СГШР (рис.4) предназначен для убирания розетки (10) внутрь корпуса балки после расстыковки её с разъёмом изделия.
Механизм подъёма СГШР (рис.4) предназначен для убирания розетки (10) внутрь корпуса балки после расстыковки её с разъёмом изделия.
Механизм состоит из кронштейна (4), рычага (6), розетки (10) и собственно механизма подъёма. На кронштейне установлен на оси рычаг (6), на хвостовике которого в петлях (7) закреплены два троса (9). Вторые концы тросов закреплены на розетке (10).

Рис. 4. Механизм подъёма СГШР
1-труба; 2-цилиндр; 3-пружина; 4-кронштейн; 5-крюк;6-рычаг; 7-петля; 8-пружина; 9-трос; 10-розетка
отрывного разъёма; 11-ось
Ушко рычага шарнирно соединено с механизмом подъёма, состоящим из цилиндра (2) с пружиной (3), размещённого внутри трубы (1). Крюк (5) с пру-жиной (8) запирает рычаг (6) при стыковке розетки с ответным разъёмом изде-лия (нижнее положение розетки на рис. 4).
При сбрасывании изделий розетка отстыковывается от разъёма груза, ры-чаг выходит из зацепления с крюком и под действием пружины розетка убира-ется внутрь балки (верхнее положение розетки на рис. 4).
Механизм подъёма СГШР крепится болтами к верхней стенке балки дер-жателя, внутри неё.
2.2.4. Блок выключателей
Блок выключателей (рис.1 поз. 19) предназначен для обеспечения безопас-ности подвески и снятии груза, а также для исключения случайного сброса их при работе с держателем на земле.
Блок выключателей состоит из корпуса, внутри которого на валике закреп-лен ротор с шестью изолированными друг от друга контактными пластинами. В прилив корпуса вставлена направляющая с гнездом для предохранительной че-ки. Корпус блока закрыт крышкой с армированными на ней шестью парами ко-нтактов. Каждая пара контактов расположена против одной из контактных пла-
стин ротора.
При извлечении из блока чеки пружина поворачивает валик вместе с рото-ром, контактные пластины касаются соответствующих контактов на крышке и включают цепи сбрасывания.
При введении предохранительной чеки в гнездо направляющей, чека отжи-мает рычаг вверх, валик с ротором поворачивается, контакты размыкаются и отключают цепи сбрасывания.
После извлечения чеки из блока все его элементы принимают исходное по-ложение.
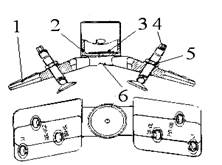
2.2.5. Механизм переключения
Механизм переключения (рис. 5) предназначен для отключения цепей так-тического сбрасывания грузов с держателя при подвеске на него пусковых уст-ройств АПУ-68УМ, АПУ-60-1ДБ, блоков УБ-32, Б-8М, Б-13Л, гондолы СППУ-22, контейнера КМГУ или держателя МБД2-67У.
Механизм состоит из корпуса (1), внутри которого расположен микровык-лючатель Д701 (3), поршень (6) с пружиной (7), рычаг (10) с винтом (4) и пру-жиной (9). Механизм крепится двумя болтами к правой панели балки держате-ля, в хвостовой её части, снизу.
 При подвеске на держатель груза, имеющего специальный упор, пор-шень отжимается этим упором вверх и сжимает пружину (7), при этом рычаг (10) поворачивается на оси и винтом (4) нажимает на кнопку мик-ровыключателя, переключая конта-кты последнего и обеспечивая этим отключение цепи тактического сбра-сывания грузов с держателя.
При подвеске на держатель груза, имеющего специальный упор, пор-шень отжимается этим упором вверх и сжимает пружину (7), при этом рычаг (10) поворачивается на оси и винтом (4) нажимает на кнопку мик-ровыключателя, переключая конта-кты последнего и обеспечивая этим отключение цепи тактического сбра-сывания грузов с держателя.
При сбрасывании (или снятии) груза с держателя все детали механи-зма под действием пружин
 |
Рис. 5. Механизм переключения.
1-корпус; 2-гайка; 3-микровыключатель Д701; 4-винт; 5-пластина; 6-поршень; 7, 9-пружины; 8-ось;
10-рычаг.
возвращаются в исходное положение, при этом переключаются контакты мик-ровыключателя, включающие цепь тактического сбрасывания держателя.
2.2.6. Прибор управления ПУС-36-71.
Прибор ПУС-36-71 (рис. 1 поз.28) предназначен для управления работой блоков УБ-32, Б-8М, Б-13Л или их модификаций. Прибор распределяет элек-трические импульсы по цепям стволов блока, обеспечивая заданный порядок работы.
2.2.7. Замок Д3-УМ.
Замок Д3-УМ (рис. 6) предназначен для подвески, транспортирования и сбрасывания с принудительным отталкиванием и без него грузов калибром от 50 до 500 кг.
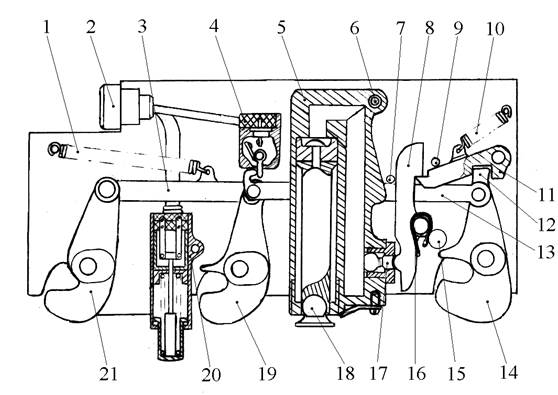

Рис. 6. Замок Д3-УМ.
1, 10, 16-пружина; 2-штепсельный разъём; 3-тяга; 4-механизм блокировки; 5-пирокамера; 6-шпилька;
7-отверстие «КОНТРОЛЬ КИНЕМАТИКИ»; 8-рычаг: 9-отверстие «СТОПОРЕНИЕ КИНЕМАТИКИ»;
11-промежуточный рычаг; 12-выступ; 13-планка; 14-задний несущий рычаг; 15-упор; 17-поршень
пиромеханизма; 18-толкатель; 19-средний несущий рычаг; 20-механизм блокировки и сигнализации;
21-передний несущий рычаг.
Корпус замка состоит из двух штампованных панелей, скреплённых между собой штифтами и заклёпками. Крепится двумя болтами, вставляемыми в по-лые оси несущих рычагов.
Замок (рис.6) имеет три несущих рычага: передний (21), задний (14) и сре-дний (19). На средний несущий рычаг подвешиваются грузы, имеющие одно подвесное ушко, на крайние – грузы, имеющие два подвесных ушка.
Закрывание замка при подвески груза выполняется подвесными ушками последнего, которые поворачивают несущие рычаги до упора в направлении полёта.
Вручную замок закрывается поворотом заднего несущего рычага (14) с помощью ключа взвода (или отвертки) до упора в направлении полёта. Надёж-ность запирания замка контролируется специальной чекой, вставляемой в от-верстие (7) (рис.6). Эта же чека, вставленная в отверстие (9), служит для стопо-рения кинематики замка в закрытом положении. В нижней части замка, с обеих сторон корпуса, нанесены метки и надпись РУЧНОЙ СБРОС, указывающие ме-
сто введения отвёртки при ручном открывании замка.
Направление перемещения ключа указано стрелкой.
Элементы кинематики замка связаны между собой. Передний и средний несущие рычаги соединены тягой (3) (рис.6), к которой присоединена пружина (1). Планкой (13) средний рычаг и тяга (3) соединены с задним несущим рыча-гом. Верхнее плечо рычага (8) пружиной (16) отжато вправо. При закрытом за-мке пружина (1) растянута, тяга (3) и планка (13) находятся в заднем положе-нии, несущие рычаги закрыты. Выступ (12) заднего несущего рычага находится в вырезе промежуточного рычага (11), который пружиной (10) отжимается вве-рх и своим концом упирается в рабочую площадку рычага (8).
При пиротехническом открывании замка на земле нижнее плечо рычага (8) отжимается назад отвёрткой. В открытом замке тяга (3) и планка (13) находятся в переднем положении, несущие рычаги открыты, рычаг (11), разъединённый с рычагом (8), пружиной (10) поднят в верхнее положение. Несущие рычаги в от-крытом положении удерживаются пружиной (1). На корпусе есть стрелка с бук-вами НП, указывающая направление движения объекта.

 |
Пиромеханизм замка Д3-УМ (рис.7) служит для открывания замка и при-нудительного отделения сбрасываемого груза.
Рис. 7. Пирокамера замка
1, 6, 10, 18-гайки; 2-шток толкателя; 3-корпус; 3а-кольцо; 4-стакан; 5-винт; 7-шайба; 8-отверстие под шпиль-
ку; 9-фильтр; 11-поршень; 12-пружина; 13-упор толкателя; 14, 16-вкладыш; 15-патронник; 17-пробка.
В нижней части он имеет два патронника (15) для установки по одному пи-ропатрону (тактического и аварийного сбрасывания). Внутри корпуса разме-щены элементы толкателя (поз.1,2,3а,4,5), фильтр (9) с гайкой (6) и шайбой (7), поршень (11) с гайкой (10) и пружина (12). Упор (13) толкателя служит для от-талкивания сбрасываемого груза. В передней части патронников имеются пазы для крепления фиксаторов затворов, запирающих пиропатроны в патронниках и передающих им импульсы тока для срабатывания. Поршень (11) (рис.7), взаи-модействуя с кинематикой замка, открывает его после срабатывания пиропат-ронов. Гайка (1) толкателя служит для предотвращения выпадания последнего из пиромеханизма. В корпусе пиромеханизма она закреплена поворотом на 900 и застопорена пружиной (12). Пиромеханизм крепится в средней части замка лёгкосъёмной шпилькой (поз.6 рис. 6), вводимой в отверстие (8). В зоне такти-ческого канала установлен вкладыш (16) для улучшения работы при повышен-ных температурах. Пробка (17) служит для фиксации вкладыша (16) в патрон-нике. В эксплуатирующих организациях не предусмотрено извлечения вкладыша из посадочного места.
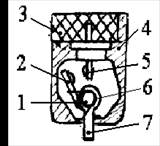
Механизм блокировки и сигнализации (МБС) (рис. 8) обеспечивает сигнализацию наличия груза на замке, а также работу цепей блокировки и сбрасывания груза со следующего замка на держателе.
 Механизм состоит из корпуса (3), во внутрен-ней полости которого размещаются стержень (6), пружина (1), контактная система (2), крышка (5), стакан (4) и шток (7).
Механизм состоит из корпуса (3), во внутрен-ней полости которого размещаются стержень (6), пружина (1), контактная система (2), крышка (5), стакан (4) и шток (7).
Пружина (1) нижним торцом упирается во фланец стержня (6), а стержень- в дно штока (7). Верхний торец пружины упирается в крышку (5). При поджатии штока (7) подвешенным грузом (или от руки) стержень (6) перемещается вверх и пере-ключает контакты системы (3). Переключение кон-тактов МБС происходит при перемещении штока (7) вверх на 1-5 мм.
После сбрасывания груза (прекращение поджа-тие штока) все элементы возвращаются пружиной (1) в исходное положение.
Рис. 8. Механизм блокировки и сигнализации
1-пружина; 2-контакты; 3-корпус; 4-стакан; 5-крышка; 6-стержень; 7-шток.
Механизм блокировки (рис.9) обеспечивает подачу электропитания после открывания несущих рычагов замка, на два МПИ-155.
 Механизм состоит корпуса (4), панели (3) с кон-тактами (5), рычага (7), ротора (1) с контактом (2) и пружиной (6).
Механизм состоит корпуса (4), панели (3) с кон-тактами (5), рычага (7), ротора (1) с контактом (2) и пружиной (6).
Панель (3) с двумя контактами (5) смонтирована в корпусе (4), ротор (1) также с двумя контактами (2) ус-тановлен на оси. На этой же оси укреплён рычаг (7), который при открывании замка поворачивается
 Рис.9. Механизм блокировки
Рис.9. Механизм блокировки
1-ротор; 2, 5-контакты; 3-панель; 4-корпус; 6-пружина; 7-рычаг.
вместе с ротором (1) под воздействием пружины (6) и замыкает контакты рото-ра и панели, включая цепь питания механизмов МПИ. При закрытом замке кон-такты механизма блокировки разомкнуты. В корпусе замка механизм блокиров-ки закреплён двумя винтами.
Затвор (рис.10) предназначен для запирания пиропатрона в патроннике и передачи электрического импульса для его поджига.
Затвор вставляется в пазы патронника при оттянутом назад фиксаторе и за-
крепляется фиксатором(3), перемещая его вперёд.
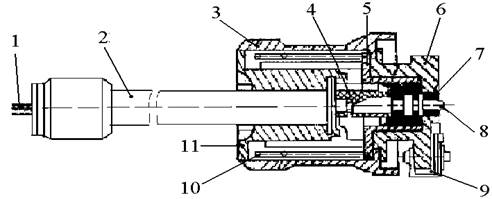 |
Рис.10. Затвор Д3-УМ
1-провод; 2-рукав; 3-фиксатор; 4-резиновая трубка; 5-втулка; 6-корпус; 7-изолятор; 8-контакт;
9-минусовой контакт; 10-пружина; 11-гайка рукава.
Затвор состоит из корпуса (6), контакта (8), изолятора (7) и фиксатора (3) с пружиной (10). Контакт (8), изолятор (7) и втулка (5) выполнены как единое целое. Провод (1), проложенный в рукаве (2), одним концом припаян к конта-кту (8), а другим концом входит в МБС, в корпус которого заделан конец рука-ва (2). К корпусу (6) приклёпан контакт (9) для улучшения контакта с пиропат-роном.
При установке затвора фиксатор (3) упирается в заплечики втулки (5) и утапливает контакт (8) в корпус (6), что предупреждает износ контакта при экс-плуатации.
Электрическая схема замка Д3-УМ, приведённая на рисунке (11), обес-печивает:
1. сигнализацию наличия груза на замке (клеммы 6, 8 и 10 разъёма Ш1);
2. подачу импульсов тока к пиропатронам Э1 и Э2 по цепям такти-ческого и аварийного сбрасывания груза (клеммы 4,5 и 10 разъёма Ш1);
3. переключение блокировочной цепи (клеммы 1,2 и разъёма Ш1);
4. подачу напряжения к механизмам МПИ при открывании замка (клеммы 7,9 разъёма Ш1).
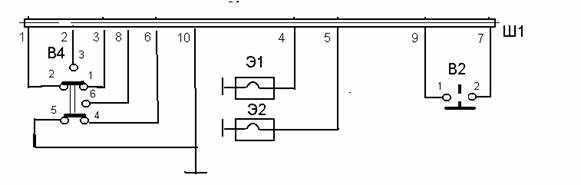 |
На рисунке (11) приведена электросхема закрытого замка (с грузом).
Рис.11. Принципиальная электросхема замка Д3-УМ
В4-контакты механизма блокировки и сигнализации; В2-механизм блокировки; Ш1-штепсельная вилка;
Э1, Э2-пиропатроны ППЛ-Т.
2.2.8. Работа балочного держателя
а) перед подвеской груза
Тумблеры на объекте, управляющие сбрасыванием груза с держателя вык-лючаются.
Предохранительная чека вставляется в блок выключателей, цепи сбрасыва-ния при этом отключаются.
Крышки люков МПИ и замок Д3-УМ открываются. Цепи сбрасывания дер-жателя проверяются на отсутствие напряжений.
Толкатель пиромеханизма устанавливается в камеру, фиксируется затвор.
Упоры ухватов ввинчиваются вверх до упора.
б) при подвеске груза.
Перед подвеской грузов несущие рычаги замка открываются. Толкатель пиромеханизма (18) (рис.6) утапливается в камере, после чего на замок подве-шивается груз. В зависимости от типа груза он подвешивается на два несущих рычага: передний (поз. 21 рис.6) и задний (14) или на один средний (19) Закрывается замок шейками подвесных ушков груза, которые принудительно поворачивают несущие рычаги до упора по полёту. Несущие рычаги перемеща-ют назад планку (13) и тягу (3), при этом:
- зуб планки поворачивает против часовой стрелки рычаг механизма блокировки (4) и размыкает контакты, отключая цепь питания МПИ;
- выступ заднего несущего рычага поворачивает промежуточный ры-чаг (11), который, растягивая пружину (10), заходит за рабочую пло-щадку рычага (11);
- растягивается пружина (1).
Надёжность запирания замка обеспечивается положением рычага (8) и про-межуточного рычага (11) и контролируется чекой, вводимой в отверстие (7). Для стопорения кинематики замка эта чека вводится в отверстие (9) замка. Чека извлекается перед вылетом объекта. Контакты механизма переключаются, обес-печивая функционирование цепей сигнализации наличия груза и блокировки.
в) после подвески груза
Подвешенный груз поджимается упорами с натягом в один оборот для бо-мб калибром 250-500 кг, в половину оборота- для бомб 50-100 кг.
Толкатель пиромеханизма спускается вниз до касания с поверхностью гру-за. В зависимости от задания подвешенный груз снаряжается или электропиро-техническим устройством или механическим. Соответственно шарики ЭПУ вводятся в МПИ или серьги- в МВН.
Пиромеханизм замка снаряжается пиропатронами ППЛ. Контрольным пу-льтом типа ПК-68М проверяется наличие контакта между пиропатронами и контактами гнезда.
Перед вылетом предохранительная чека извлекается из блока выключате-лей, а контрольная чека- из отверстия замка с надписью «СТОПОРЕНИЕ КИ-НЕМАТИКИ».
г) при сбрасывании груза в полете.
Схемой управления сбрасыванием может быть предусмотрена подача им-пульса тока для поджига либо тактического пиропатрона, либо аварийного. При подаче импульса тока с клеммы 4 (рис11) разъёма Ш1 на пиропатрон тактичес-кого сбрасывания Э1 последний срабатывает. Образовавшиеся газы перемеща-ют поршень (поз.17 рис.6) пиромеханизма, который (поршень) поворачивает рычаг (8) и выводит его из зацепления с промежуточным рычагом (11). Рычаг (11) оттягивается пружиной (10) вверх и освобождает задний несущий рычаг (расцепляется с ним).
Несущие рычаги, связанные между собой, под воздействием грузов откры-ваются. Одновременно с открыванием замка газы, пройдя через фильтр (поз.9 рис.7), отверстие в гайке (6), перемещают вниз шток (2) толкателя, который упором (13) отталкивает сбрасываемый груз. При открывании замка зуб планки (поз.13 рис.6) отходит вперёд, освобождая рычаг (поз.7 рис.9) механизма бло-кировки, который (рычаг) поворачивается вместе с ротором (1) и обеспечивает подачу напряжения к механизмам МПИ.
После отделения груза стержень (поз.6 рис.5) и шток (7) МБС перемеща-ются вниз (в исходное положение), контакты 1,2 (рис.11) и 4,6 размыкаются, а контакты 2,3 и 5,6 замыкаются, обеспечивая функционирование цепи сигнали-зации наличия груза и цепи блокировки.
При подаче импульса тока с клеммы 5 разъёма Ш1 на пиропатрон Э2 ава-рийного сбрасывания работа кинематики замка и элементов электрической схе-мы аналогична изложенному для тактического сбрасывания груза.
д) при ручном открывании
Для проверки или снятия груза, в случае отмены полёта или возвращения объекта с не сброшенным грузом, замок открывается отвёрткой, которая вводи-тся в замок снизу, в месте, обозначенном метками и надписью РУЧНОЙ СБРОС. При этом нижнее плечо рычага (8) (вместо поршня 17 рис.6) отжимает-ся назад отвёрткой, верхнее плечо рычага расцепляется с промежуточным ры-чагом (11). Далее кинематика замка работает, как при пиротехническом сбросе.
.
3.МНОГОЗАМКОВЫЙ БАЛОЧНЫЙ ДЕРЖАТЕЛЬ МБДЗ-У2Т-1
3.1.Назначение и основные технические данные
Универсальный многозамковый балочный держатель МБД3-У2Т-1 предна-значен для применения на самолете в качестве устройства для наружной подве-ски, транспортировки и сбрасывания двух грузов.
Держатели взаимозаменяемы по местам крепления к самолету, а также по местам установки замков и других съемных агрегатов.
Основные технические данные:
-Количество и калибр грузов, подвешиваемых
на один держатель………………………………………….2 груза калибром от
50 до 500 кг
-Напряжение питания ……………………………………..27в постоянного тока
-Минимальное напряжение в цепи
аварийного управления…………………………………….не более 20в
-Источник питания …………………………………………от самолета
-Способ сбрасывания
грузов………………………………………………………..1/электропиротехничес-
кий с принудительным
отталкиванием;
2/ручной на земле с
помощью ключа
сброса
-Порядок сбрасывания грузов …………………………… серией с интервалами
(сначала задний груз,
а затем передний)
-Габаритные размеры:
· длина …………………………………………………4470 мм
· ширина ……………………………………………….292 мм
· высота ………………………………………………..312мм
· вес ………………………………………………….....не более 106 кг.
3.2.Устройство и работа.
Универсальный многозамковый балочный держатель МБД3-У2Т-1 состоит (рис.12) из силовой балки, двух рам (8), закрепленных по одной в передней и задней частях балки, двух замков (9) Д3У-1А, установленных на рамах, двух механизмов(4, 15) подачи импульсов МПИ-155 и двух механизмов (5, 16) ВЗРЫВ-НЕВЗРЫВ МВН-66, закрепленных по одному в передней и задней частях балки на кронштейнах, одного блока (11) МПИ и МВН, закрепленных в средней части балки, МПИ-155 (20) и МВН-66 (19), закрепленных в заднем обтекателе (14), блока предохранительных выключателей (6), контрольного штепсельного разъёма, расположенного в технологическом люке (7) для проверки исправности электроцепей держателя, электрожгута (2) и хвостовика (22) со стопорным устройством для удержания переходников удлинителей ЭПУ. Держатель с передней стороны закрыт обтекателем (3) и с задней стороны обтекателем (14).
Рамы с установленными в них замками расположены тандемом снизу балки и предназначены для подвески двух грузов. МПИ-155 (4, 15) и МВН-66 (5,16) используются для головных устройств грузов, а МПИ и МВН, закрепленных в блоке (11) и МПИ (20), МВН (19) – для донных устройств грузов.
Электрожгут (2), выходящий наружу, предназначен для электрического соединения держателя с бортовой сетью самолета.
Держатель крепится к самолету через узлы подвески, закрепляемые специальными болтами во втулках (1), запрессованных в отверстия балки.
|
|
|
|
|
Дата добавления: 2015-05-09; Просмотров: 16418; Нарушение авторских прав?; Мы поможем в написании вашей работы!