КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лабораторная работа №3. Обработка и оформление результатов измерений
|
|
|
|
Выводы
Обработка и оформление результатов измерений
Первичные результаты измерений
Применяемое оборудование и методика измерений (принцип работы, основные характеристики)
Объект исследований
Цель работы
Лабораторная работа №1
ИССЛЕДОВАНИЕ ПОСТОЯННОГО МАГНИТНОГО ПОЛЯ ПРЕОБРАЗОВАТЕЛЕМ НА ОСНОВЕ ДАТЧИКА
1. Цель работы - ознакомиться с основными характеристиками преобразователей Холла; ознакомиться с методами измерения параметров магнитного поля, использующими преобразователи Холла; приобрести навыки контроля интенсивности МП, получить навыки обработки результатов эксперимента и определения погрешности измерений; исследовать магнитное поле конкретного источника.
2. принцип действия датчика Холла
Движущиеся в магнитном поле электрические заряды под воздействием силы Лоренца изменяют свою траекторию. Проявляется это в эффекте Холла, заключающемся в том, что при помещении в МП пластины, через которую течёт электрический ток, в направлении, перпендикулярном направлению электрического тока, на сторонах пластины возникает электрическое напряжение. Величина этого напряжения пропорциональна плотности электрического тока и напряжённости МП. На измерении этой ЭДС основан принцип работы так называемых датчиков Холла.
 |
Схема, поясняющая эффект возникновения ЭДС Холла, и эквивалентная электрическая схема датчика Холла приведены на рис. 1.
Величина ЭДС Холла Ux = КIB, где I – ток, протекающий через пластину; К - коэффициент, зависящий от материала ПП и его размеров.
Из приведённого соотношения следует, что измеряемый милливольтметром сигнал пропорционален магнитной индукции МП и плотности электрического тока, протекающего в пластине. Следовательно, характеристика преобразования датчиков Холла линейна (как правило, в пределах 1%) практически во всём диапазоне измерений (рис.2).
Промышленность выпускает широкую номенклатуру датчиков для измерения индуктивности МП от долей микротеслы до единиц теслы. Напряжение питания датчиков Холла постоянное, от 4.5 до 10.5 В. Ток питания высокоомных ПП достигает десятков, а низкоомных - сотен миллиампер. Чувствительность датчиков Холла с высокоомным ПП достигает сотен милливольт на теслу, а с низкоомным ПП - единиц вольт на теслу.
Поскольку напряжённость и магнитная индукция МП - векторные величины, показания датчика зависят от ориентации пластины относительно направления МП. а также от неравномерности самого МП. Для того чтобы полнее охарактеризовать МП, необходимо представить его параметры в трёх пространственных координатах.
 |
Преимущества датчиков Холла: малые размеры, простота использования и измерения электрического напряжения. Диаграмма направленности датчика Холла близка к идеальной, что позволяет использовать его для определения направления вектора напряжённости МП. Наименьший порог чувствительности датчика Холла к повороту в МП составляет 5... 10 мин.
Однако на метрологические характеристики датчиков существенно влияют: неравномерность свойств полупроводниковой пластины, наличие механических напряжений, вызванных пайкой электродов, размещение при измерениях в МП контура подводящих проводников (рамка с током в магнитном поле) и др. Для снижения влияния перечисленных причин на показания датчика принимаются соответствующие меры: компенсация (включение компенсационных сопротивлений), скручивание подводящих проводников (уменьшение площади петли с током).
 |
3. Оборудование п приборы для выполнения ЛР
В лабораторной работе используют измерительное устройство, содержащее:
- Измерительный щуп с датчиком Холла или измерительный щуп с двумя датчиками Холла – продольным и поперечным;
- блок питания микросхем датчиков Холла, номинальное напряжение б В:
- мультиметр для измерения выходного сигнала (напряжение постоянного тока) датчика:
- коммутационную коробку, служащую для электрического соединения перечисленных выше компонентов.
Измерительное устройство схематично изображено на рис. 3.
Измерительные щупы с твердотельными полупроводниковыми датчиками (преобразователями) Холла производства фирмы Honeywell типа SS59Е биполярными, с аналоговым выходом. На кристалле датчика кроме элемента Холла расположена схема усилителя, выходной каскад которого состоит из двух биполярных транзисторов (см. рис.1.1.) Характеристика преобразователей (микросхем) SS59Е приведена в табл. 1.
Таблица1. Характеристики преобразователей SS59
| Марка | Диапазон, мТл | Uпит. | Максимальное выходное напряжение. В | Чувствительность, В/Тл | Потребляемый ток, мА | Диапазон рабочих температур» °с |
| SS59 | ±100 | 3...6.5 | 1,75 | 17,5 | от -40 до +100 | |
Таблица 2
| Магнитная индукция В. мТл | -20 | -40 | -60 | -80 | -100 | ||||||
| Напряжение U(V) | 4.93 | 4.52 | 4.18 | 3.78 | 3.00 | 2,23 | 1,84 | 1,49 | 1.10 |
Проверка характеристики датчиков Холла (микросхем) проведена в постоянном равномерном магнитном поле. Результаты измерений приведены в табл.2.
Аппроксимирующая зависимость функции преобразования датчиков и градуровочная характеристика датчиков, полученные методом наименьших квадратов, имеют соответственно вид: Uвых. = f(B), В: Uвых.=0,019В+3,008; В=f¢(Uвых),mTc:
В=52,181Uвых.-156.947
В качестве источников питания в лабораторной работе применяются адаптеры, характеристики которых приведены в табл.3.
Таблица 3. Характеристики источников питания
| Марка адаптера AC /DC | Номинальное выходное напряжение. В | Стабильность, мкВ/ ч | Основная допускаемая погрешность выходного напряжения | Максимальный вы-ходной ток. мА | Нормальные условия применения | Дополнительные сведения |
| АС-220-S-6-500; стабилизированный | б* | <1 | ±5% | Температура воздуха (10...30)*С. Относительная влажность воздуха до 80%. Атмосферное давление от 650 до 800 мм рт.ст. | Питание 220 В ±10% 50 Гц | |
| DN500; неста- бнлизи- рован- ный | 3; 4,5; б; 7,5; 9; 12 | <1 | ±5% | Питание 220В ±10% 50 Гц. Комплектуется набором из 8 типов разъёмов |
* Контроль напряжения питания и его стабильности во времени показал, что используемый в лабораторной работе источник имеет на выходе напряжение 5,92 В. Стабильность его в течение двух часов работы, по крайней мере, не хуже =10 мВ (по показаниям АРРА 91), т.е. стабильность источника выше 0,2%.
Для измерения выходного напряжения датчика используется измерительный прибор - многофункциональный цифровой мультиметр. Характеристики мультиметра по напряжению постоянного тока приведены в табл. 4.
 |
Таблица 4.
Предел основной допускаемой погрешности установлен для нормальных условий эксплуатации:
температура окружающей среды 23±5° С;
относительная влажность воздуха 60±20%;
атмосферное давление 750±30 мм рт. ст.;
номинальное напряжение питания 9 В (отсутствует индикация разряда батареи питания).
Дополнительная погрешность при изменении температуры окружающей среды на 1°С составляет 0,15 от предела допускаемой основной погрешности.
Входное сопротивление мультиметра - 10 Ом.
Прежде чем приступить к выполнению лабораторной работы, студент должен ознакомиться с теоретическими разделами лабораторного практикума и изучить разделы.1 - 5 настоящей лабораторной работы. Подготовленность студента к выполнению лабораторной работы определяется преподавателем по ответам на контрольные вопросы.
4. Порядок выполнения ЛР
Лабораторная работа выполняется в следующей последовательности:
1. Ознакомиться с устройством и руководствами по эксплуатации блоков измерительного устройства (датчик Холла, блок питания, мультиметр).
2. Получить от преподавателя источник постоянного магнитного поля – постоянный магнит;
3. На основании формы и размеров источника МП сделать предположения о форме и неоднородности магнитного поля источника, изобразив картину силовых линий.
4. Расположить источник МП в центре поля измерений.
5. Подготовить ИУ к измерениям, для чего необходимо:
· присоединить разъёмы измерительного щупа и удлинительного кабеля;
· присоединить кабель к разъёму подключения источника питания и мультиметра. Внимание! Соединения кабеля с разъёмами производить с соблюдением предусмотренной в них ориентации и без приложения чрезмерных усилий! В противном случае Вы можете повредить разъёмы.
· включить мультиметр и установить режим и диапазон измерений электрического напряжения постоянного токасогласно руководству по эксплуатации;
· включить источник питания;
6. Определить расстояния и направления от источника МП, где величина магнитной индукции падает до минимального значения
7. Составить карту (картограмму) измерений МП выбранного источника, для чего использовать имеющуюся информацию о возможном уровне МП. предположения о форме и неоднородности МП. В карте измерений указать позиции измерений по направлениям и расстояниям от источника МП. Для составления картограммы используйте милиметровую бумагу.
8. произвести многократные (не менее пяти раз) измерения выходного сигнала в отсутствие МП:
9. занести первичные результаты измерений в табл. 5.
| Номер измерений I=1..n | Результат измерения Uoi,В | СКО[Uoi],B | интервальная оценка при P=0,9 |
Таблица 5.
10.Подготовить ИУ к измерениям, для чего необходимо:
11. произвести измерения МП в намеченных точках картограммы, для чего снять показания мультиметра. Измерения проводить в каждой точке 10 раз, снимая показания на каждом из каналов. Занести показания в таблицу 6. Выполнить обработку показаний мультиметра и перейти от напряжения к индукции, согласно формуле в теоретической части.
Таблица 6.
| Образец № | |||||
| 1 канал | 2 канал | ||||
| Точка | U1 В | B1 Тл | U2 В | B2 Тл | |
Выполнить статистическую обработку. Оформить таблицу 7.
Таблица 7.
| Итоговая таблица | |||||
| номер точки/канал | Uj испр | uj | Bj | Sj | |
| 1 канал | |||||
| 2 канал | |||||
12.Для перехода от численных данных к геометрическим необходимо:
13.приблизительно подсчитать среднее значение индукции по каждому каналу. Для этого не обязательно соблюдать высокую точность, так как для дальнейшего анализа результатов важен знак средней индукции. Если линии поля входят в датчик, то это значение будет положительным, в обратном случае – отрицательным.
14. В каждой исследуемой точке построить вектора, соответствующие векторам магнитной индукции по каждому из каналов, для чего использовать полученные после статистической обработки значения напряжений.
15.Получить результирующий вектор магнитной индукции поля для каждой исследуемой точки.
16.Сделать выводы о конфигурации магнитного поля.
17.. Отключить питание, выключить мультиметр, отсоединить измерительный кабель от щупа с датчиком. Убрать рабочее место. Сообщить об окончании измерений преподавателю. Сдать оборудование и приборы.
5. Обработка результатов исследований проводится каждым студентом самостоятельно при оформлении отчёта о лабораторной работе.
Обработать результаты в следующей последовательности:
1. Вычислить среднее арифметическое значение выходного
напряжения датчика в отсутствие МП по формуле 
2. Найти точечную оценку дисперсии Uoi по формуле 
3. Найти оценку СКО Uo, по формуле 
4. Коэффициент исправления смещенности оценки СКО К(n) принять равным 1.1.
5. Найти оценку СКО среднего значения  по формуле
по формуле

6. Найти интервальную оценку Uo при доверительной вероятности Р = 0.9. используя неравенство Чебышева: 
7. При заданной доверительной вероятности Р = 0,9 t2=10. Предел допускаемой погрешности измерений в данном случае равен  . Результат записывается в виде
. Результат записывается в виде 
8. Вычислить предел основной допускаемой погрешности измерения мультиметром Дпр по формуле табл. 4.
9. Вычислить СКО измерений мультиметром исходя из предположения о равномерном законе распределения результата измерений мультиметром, т.е. полагая, что СКО равно пределу основной допускаемой погрешности мультиметра деленной на  :
: 
10. Сравнить результаты пунктов 3 и 8. Выбрать наименее точный результат, если результаты различаются более чем в два раза. В противном случае продолжить вычисления.
11. Вычислить оценку суммарной СКО как среднегеометрическое СКО случайной составляющей измерений (см. п. 3) и СКО мультиметра (см. п. 8): 
12. Вычислить интервальную оценку и предел суммарной допускаемой погрешности определения среднего значения  выходного напряжения
выходного напряжения  аналогично п. 6 при суммарной СКО по п. 11:
аналогично п. 6 при суммарной СКО по п. 11: 
13. По функции преобразования в табл. 4 вычислить зна-
чение выходного напряжения датчика U0датч., соответствующего
нулевому уровню МП.
14. Сравнить значения  U0датч. Если разница
U0датч. Если разница  , то
, то  рассматривается в дальнейшем в качестве поправки к результатам измерений в позициях картограммы.
рассматривается в дальнейшем в качестве поправки к результатам измерений в позициях картограммы.
15. Произвести аналогичные вычисления,
для измерений в каждой точке карты (картограммы) измерений
16. при наличии МП источника, т.е. найти средние значения  и пределы допускаемой погрешности
и пределы допускаемой погрешности  .
.
17. Для каждой позиции измерений j вычислить исправленное значение выходного напряжения, введя, при необходимости, поправку (п. 14) по формуле
 Предел допускаемой погрешности для исправленного значения выходного напряжения определён в п 16.
Предел допускаемой погрешности для исправленного значения выходного напряжения определён в п 16.
18. Вычислить значения магнитной индукции в точках картограммы измерений Bj по исправленным значениям выходного напряжения (п. 17) и градуировочной зависимости использованного в измерениях датчика в составе измерительного шупа (табл.5).
19. Вычислить составляющую погрешности магнитной индукции от нестабильности источника питания датчика, подставив в градуировочную зависимость датчика Холла из табл. 4 предельное отклонение напряжения питания датчика от среднего, указанное в табл. 5.
20. Вычислить погрешность определения магнитной индукции, подставив в градуировочную зависимость датчика Холла из табл. 4 предел допускаемой погрешности измеряемого выходного напряжения датчика (подп. 8.13). Свободный член градуировочной зависимости не учитывается.
21. 8.18. Вычислить суммарную предельную допускаемую погрешность определения магнитной индукции DBj как геометрическую сумму составляющих, найденных в подп. 19 и 20.
20. Заполнить картограмму измерений, указав на ней направления mm и max gradВ. Найти аппроксимирующие зависимости изменения индукции МП в этих направлениях.
1.4. Оформление отчёта о ЛР
Отчёт о лабораторной работе должен быть оформлен при подготовке к защите по прилагаемой форме (см. приложение).
Отчёт о лабораторной работе должен быть напечатан на листах формата А4. шрифтом Times New Roman. 12 кг (в таблицах -10 кг), одинарный межстрочный интервал, поля 2,5 см.
Контрольные вопросы
1. Какими величинами характеризуются постоянные и переменные магнитные поля?
2. Что является источником постоянного магнитного поля?
3. Как ведут себя различные вещества в магнитном поле?
4. Что собой представляются постоянные магниты?
5. Что такое эффект Холла?
6. Для чего может использоваться эффект Холла?
7. От чего зависит ЭДС Холла?
8. Какие физические эффекты используются для измерения интенсивности МП?
9. Принцип действия и преимущества датчиков Холла.
10. Какова цель лабораторной работы?
11. Правила пользования составляющими измерительного устройства (блок питания, мультиметр).
12. Какие и каким образом необходимо заполнить таблицы по результатами измерений и вычислений?
13. Подготовьте картограмму измерений выбранного объекта.
Лабораторная работа № 2
ИССЛЕДОВАНИЕ ИНТЕНСИВНОСТИ МАГНИТНОГО ПОЛЯ ЭЛЕКТРОПРИБОРОВ
Цель работы - ознакомиться методами и средствами измерения переменных МП, изучить принцип действия полупроводникового датчика МП, и приобрести навыки контроля интенсивности МП от электроприборов различного назначения.
1.1.Электроприборы, применяемые в повседневной жизни (на работе и в быту), являются не только источником опасности поражения электрическим током, но и источником электромагнитных излучений промышленной частоты, интенсивность которых может достигать значений, представляющих опасность для здоровья человека. Это. в первую очередь, относится к тем электроприборам, применение которых подразумевает непосредственный контакт с телом человека. Например, бытовые приборы повседневного пользования (электрофены, электробритвы, кофемолки и др.) и ручной электроинструмент (электродрели, отрезные и шлифовальные машинки и др.).
1.2.Принцип действия полупроводникового датчика.
Особое место среди полупроводниковых датчиков магнитного поля занимают
гальваномагниторекомбинационные преобразователи (ГМРП), что обусловлено как
их высокой чувствительностью и сравнительной простотой изготовления.
Энергетическая структура поверхности любого полупроводника всегда отличается от объемной, что обусловлено наличием в запрещенной зоне определенных разрешенных уровней энергии, связанных с обрывом кристаллических связей на поверхности, наличием на ней дефектов и дислокаций, адсорбированных атомов и молекул. Вся совокупность этих энергетических уровней называется поверхностными состояниями. Энергетические уровни поверхностных состояний могут служить ловушками захвата или центрами рекомбинации. Центрами рекомбинации служат поверхностные состояния, энергетические уровни которых расположены вблизи середины запрещенной зоны под уровнем Ферми, а следовательно, заполнены электронами. Тогда при захвате на них дырки из валентной зоны происходит акт рекомбинации.
Скорость поверхностной рекомбинации имеет размерность скорости [см/с] и определяется концентрациями центров рекомбинации на поверхности и носителей заряда, подходящих к ней.
Рассмотрим теперь плоский образец полупроводника, вдоль которого протекает ток, причем образец однородный и, следовательно, линии тока параллельны его граням и концентрация носителей одинакова во всем объеме, если не учитывать влияние поверхностей. Однако на поверхности происходит рекомбинация электронно-дырочных пар, а, следовательно, вблизи нее этих пар будет не хватать, т.е. создается градиент концентрации от поверхности к центру образца. Если скорости поверхностной рекомбинации на обеих гранях образца одинаковые, то градиенты концентрации от одной и от другой грани образца будут одинаково искривлять траектории движения носителей. Если теперь приложить к образцу магнитное поле, то за счет силы Лоренца концентрация носителей у одной из граней увеличивается, а у другой уменьшается, за счет чего на первой скорость поверхностной рекомбинации возрастает, а на второй уменьшается. Однако общее число рекомбинирующих пар не изменится, и проводимость образца может измениться только за счет искривления траектории движения носителей, что является обычным магниторезистивным эффектом. Однако, если скорость поверхностной рекомбинации на одной грани образца существенно больше, чем на другой, то помещение образца в магнитное поле приведет к существенному росту на этой грани поверхностной рекомбинации, а это значит, что под действием магнитного поля концентрация носителей в образце будет уменьшаться, что приведет к уменьшению проводимости. Это явление и носит название гальваномагниторекомбинационного эффекта.
Гальваномагниторекомбинационный эффект проявляется в полупроводниках с проводимостью близкой к собственной. К числу основных специфических терминов и определений параметров ГМР преобразователей относятся:
1.Выходной сигнал Uвых. Представляет собой разность выходных напряжений △U=Uвых=Uв-U0, где Uв -напряжение на выходе ГМР элемента при номинальном значении индукции магнитного поля, U0- напряжение на выходе ГМР элемента при отсутствии магнитного поля.
2.Номинальный рабочий ток. Это ток, при котором гарантируются параметры ГМР, указанные в паспорте на прибор. Определяется по формуле Iном = Uпит / (Rн + Rг),где Rг - сопротивление ГМР элемента при В = О, Rн -сопротивление нагрузки, R - сопротивление элемента.
3.Магнитная чувствительность γ. Представляет собой отношение отношение приращения выходного сигнала ΔUB к вызвавшей его изменение магнитной индукции ΔB, при протекании рабочего тока I =const.
4.Температурный коэффициент, определяемый по формуле ТКγ = (100 / γТ0) х (△γ /△Т), где γТ0 - магнитная чувствительность при нормальной (комнатной) температуре, △γ - изменение чувствительности, △Т - изменение температуры. Значение ТКγ зависит от отношения Rг / Rн.
На рис. 1.1. показаны варианты конструкций ГМР преобразователей. На рис.1.2. – схема включения преобразователя.
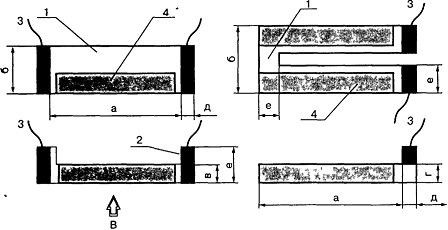
Рис.1.1..Конструкции ГМР преобразователей:1-полупроводниковая пластина, 2 - контакты, 3 - выводы, 4 - область с большой скоростью рекомбинации
ГМР преобразователь представляет собой пластинку, изготовленную из проводникового материала, в которой выделена область с большой скоростью рекомбинации носителей заряда. При воздействии магнитного поля на эту область происходит изменение
 Рис. 1.2. Схема включения ГМР преобразователя магнитного поля
Рис. 1.2. Схема включения ГМР преобразователя магнитного поля
|
сопротивления ГМР элемента. Воздействие магнитного поля одной полярности приводит к увеличению сопротивления ГМР элемента. Изменение полярности магнитного поля вызывает возрастание сопротивления элемента.
Режим работы ГМР преобразователя определяется значением сопротивления нагрузки Rн. Если оно в 10 раз превышает сопротивление преобразователя Rг, то последний работает в режиме питания от источника тока (Iуп = const.). В этом режиме обеспечивается максимальная чувствительность ГМР преобразователя. При этом схема обеспечивает режим максимальной магнитной чувствительности ГМРП. Можно так подобрать значение сопротивления Rн, что будет обеспечиваться режим работы с минимальным значением температурного коэффициента магнитной чувствительности (Rг/Rн=2.5).Чаще всего для изготовления ГМР преобразователей используется германий, обладающий высокой подвижностью и длиной диффузионного смещения около 1 мм. В принципе, для этих целей могут быть использованы и другие полупроводниковые материалы. Поверхностной рекомбинации препятствует слой объемного заряда. Поверхность кремния окисляется на воздухе при комнатной температуре, а наличие слоя окисла у поверхности приводит к появлению слоя объемного заряда. Германий жене окисляется на воздухе, обладает меньшей шириной запрещенной зоны, и следовательно, слой объемного заряда у поверхности германия оказывается меньшей ширины и обладает меньшей высотой барьера, чем у поверхности кремния.Зависимость напряжения на выходе ГМР от магнитной индукции линейна в широком диапазоне изменения индукций (±80 мТл) управляющего магнитного поля. При оптимальном сопротивлении нагрузки выходной сигнал остается почти неизменным в достаточно широком диапазоне температур. Разброс значений электрических параметров составляет ±30%.
2.1. Оборудование и приборы для выполнения ЛР
 |
В лабораторной работе применяется миллитесламетр типа Ф 4356 (рис. 2.1), предназначенный для измерений среднего значения индукции переменных магнитных полей в воздушных зазорах электрооборудования.
В качестве измерительного щупа используется щуп ГМРП-4 на основе гальваномагниторекомбинационного преобразователя. Параметры преобразователя приведены в таблице 1.1., характеристики миллитесламетра в таблице 1.2.
Электрические параметры ГМРП в режиме максимальной магнитной чувствительности Таблица 1.1.
| Тип | I, мА | Rг, кОм | RH, кОм | γ, В/Тл | Кt γ, %/град | размеры, мм |
| ГМРП-4 | 50 | 20 | 1.0 | 75 | 0.2 | 10.0х1.5х0.15 |
Основные характеристики прибора приведены в табл. 2.1.
3. Порядок выполнения ЛР
К выполнению лабораторной работы приступают только после собеседования и устного разрешения преподавателя!
Лабораторная работа, как правило, выполняется бригадой. Старший в бригаде получает под свою ответственность от преподавателя необходимые приборы и оборудование.
Лабораторная работа выполняется в следующей последовательности:
1. Ознакомиться с устройством, расположением и назначением органов управления и контроля прибора Ф 4356.
2. Получить у преподавателя электроприборы для исследования интенсивности МП.
3. Изучить правила безопасности при работе с электроприборами.
4. Подготовить прибор к измерениям, для чего необходимо:
• подсоединить прибор к сети питания с помощью штепсельной вилки кабеля питания;
• установить максимальный диапазон измерений;
• включить прибор;
• проверить положение стрелки прибора относительно нулевого значения шкалы, при необходимости подрегулировать соответствующим винтом на панели прибора;
• установить минимальный диапазон измерений и проверить точность установки нулевого положения стрелки прибора, при необходимости подрегулировать;
• установить предел измерений, превышающий ожидаемое значение интенсивности исследуемого МП.
5. Провести исследования интенсивности МП электроприбора, для чего следует:
• включить электроприбор, соблюдая правила пользования и правила безопасности;
• поднести стержень измерительного глупа к электроприбору и снять отсчёт показаний прибора;
• измерения провести в нескольких положениях щупа относительно корпуса электроприбора;
• в каждом положении произвести не менее 10 отсчётов по шкале прибора;
• занести измеренное значение интенсивности МП Пи в табл. 3.1.
• выключить электроприбор и отключить его от сети электропитания;
• последовательно повторить действия п. 5 с другими исследуемыми электроприборами.
Табл.3.1.Результаты измерений интенсивности МП Электроприборов
| №п/п | Электроприбор Тип, мощность, марка | Положение точки измерения | Пиj, j=1...n | Пcр, мкТл | 
| 
| Sпр | Sсум | Dсум мкТл |
6. Обработать результаты измерений.
Обработка результатов исследований проводится каждым студентом самостоятельно при оформлении отчёта о лабораторной работе.
Последовательность обработки результатов:
• вычислить среднее арифметическое значение п измерений в каждом положении
• щупа Пср., по формуле 
• вычислить точечную оценку дисперсии i-го измерения

 ;
;
• вычислить СКО i-го измерения  по формуле
по формуле 
• вычислить СКО среднего SПcp по формуле 
•
• определить основную допускаемую погрешность прибора в применённом диапазоне измерений Dпр.;
• вычислить СКО прибора Sпр в предположении равномерного распределения допускаемой погрешности по формуле 
· вычислить суммарное СКО измерений Sсум. по формуле 
· вычислить суммарную основную допускаемую погрешность измерения Dсум по формуле Dсум =tSсум.
· результаты вычислений занести в табл. 3.1.
Контрольные вопросы
1. Какими величинами характеризуются переменные магнитные поля?
2. Что является источником переменного магнитного поля?
3. Какие электроприборы являются источником постоянного воздействия МП на человека?
4. Какие физические эффекты используются для измерения интенсивности МП?
5. Какой датчик используется в данной лабораторной работе?
6. Преимущества ГМР датчиков.
7. Какой материал преимущественно используется для ГРМ датчика? Почему?
8. Конструкция ГРМ датчика.
9. Какова цель лабораторной работы?
10. Правила пользования прибором Ф 4356.
11. Каково назначение и характеристики исследуемых электроприборов?
12. Какова последовательность обработки результатов измерений?
13. Какова форма представления результатов измерений?
14. Меры безопасности при работе с электроприборами.
Балтийский Государственный Технический Университет «ВОЕНМЕХ» им. Д.Ф. Устинова
Кафедра «Инжиниринг и менеджмент качества» (Н2)
дисциплина «Физические основы измерений»
«Исследование преобразователя Холла»
ст. преподаватель: Юлиш В.И.
Санкт-Петербург
2013
|
|
|
|
|
Дата добавления: 2015-05-09; Просмотров: 1943; Нарушение авторских прав?; Мы поможем в написании вашей работы!