КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Настройка параметров в полете
|
|
|
|
Вы можете настроить параметры в полете в Mission planner (необходимо обеспечить телеметрическую связь или использовать кабель USB) или использовать регулятор подстройки (аналоговая крутилка) на передатчике (Tx) настроенную на канал 6 (CH6) (необходимо иметь дополнительный свободный канал на вашем передатчике, который управляется регулятором или слайдером) для использования функции тонкой настройки CH6, вы можете использовать любой свободный канал на передатчике но он должен быть подключен к ко входу канала СН6 на контролере АРМ.)
Способ 1: (см. также Метод 2)
Выберите вкладку «ArduCopter Configuration " в Mission Planner, и выберите опцию CH6, которую вы хотели бы настроить. например CH6_RATE_KP.
Начиная с МП v1.1.44 и выше, значение наибольшей и наименьшей величины параметра может быть выставлено в поле рядом с выбором режима канала Ch6. В качестве альтернативы можно также изменить параметры TUNE_HIGH и TUNE_LOW в левой панели «Configuration > Adv Parameter List».
Введите верхний и нижний пределы параметра который Вы хотите настроить, выберите значение + и - вокруг 30-40% от значения умолчанию (так для CH6_RATE_KP установить "нижний" в 0,100 и "верхний" в 0,180 от значения по умолчанию из 0,140)
Затем нажмите кнопку "Write Params '. Для проверки значения нажмите «Refresh Params», введенные верхние и нижние границы должны быть правильно отображены и в закладке Список параметров (Parameter List tab параметры TUNE_HIGH & TUNE_LOW) и в полях ввода параметров.
Чтобы проверить, что значения меняются: покрутите крутилку или слайдер на передатчике и нажмите «Refresh Params», значение должно быть отображено в центральной панели в соответствующем окне, покрутите снова и нажмите «Refresh Params», значение должно будет измениться. В качестве альтернативы перейти на вкладку Терминал (Terminal), введите «test» на, а затем «tune» и ваши величины будет прокручиваться вниз в окне, при вращении крутилок или слайдера, значения должны изменяться.
Теперь установить назначенную на передатчике под канал CH6 крутилку или слайдер в положение между 0 и 25%, затем тщательно произведите тесовый полет,приземлитесь и подстройте параметр по новой и снова сделайте тестовый полет.
Чтобы узнать последний вариант параметра, оставьте крутилку или слайдер на вашем передатчике в выбранной позиции, подключения к МП затем нажмите кнопку «Refresh Params», значение должно отобразиться в в соответствующем окне на вкладке «Parameter List» (под значениями TUNE_HIGH & TUNE_LOW). В качестве альтернативы выберите вкладку «Terminal» снова, тип «test», а затем «tune» и выбранное значение будет видно при прокрутке окне вниз. Введите это значение в правильном месте во вкладке «Configuration».
Теперь можно настроить еще один параметр, или, если вы закончили настройку, установите параметр в CH6_NONE (это важно!)
Главным параметром для настройки имеет значение вашего параметра Rate_KP. Это значение отвечает за поведение Вашего коптера:
- отсутствие ответа на управляющие входы (слишком низкий)
- вялым (слишком низкий)
- стабильным (в самый раз)
- более активным (немного слишком выше чем надо)
- или колеблющимся (слишком высокий)
Вот все параметры которые можно настроить таким способом:
CH6_NONE 0
--- высота(Attitude)
CH6_STABILIZE_KP 1
CH6_STABILIZE_KI 2
CH6_STABILIZE_KD 29 / / дублировать с CH6_DAMP
CH6_YAW_KP 3
CH6_YAW_KI 24
--- оценка(сота()способомаязкая те параметр по новой и етра может быть выставлено в Rate)
CH6_ACRO_KP 25
CH6_RATE_KP 4
CH6_RATE_KI 5
CH6_RATE_KD 21
CH6_YAW_RATE_KP 6
CH6_YAW_RATE_KD 26
--- контроль скорости удержания высоты (Altitude rate controller)
CH6_THROTTLE_KP 7
--- Дополнительно (Extras)
CH6_TOP_BOTTOM_RATIO 8
CH6_RELAY 9
--- Навигация (Navigation)
CH6_TRAVERSE_SPEED 10 / / Максимальная скорость полета к следующей точке маршрута
CH6_NAV_KP 11
CH6_LOITER_KP 12
CH6_LOITER_KI 27
--- Специфичный для традиционного вертолета (Trad Heli specific)
CH6_HELI_EXTERNAL_GYRO 13
--- контроль высоты (altitude controller)
CH6_THR_HOLD_KP 14
CH6_Z_GAIN 15
CH6_DAMP 16 / / дублировано с CH6_YAW_RATE_KD
--- Контроллер оптического удержания позиции (optical flow controller)
CH6_OPTFLOW_KP 17
CH6_OPTFLOW_KI 18
CH6_OPTFLOW_KD 19
CH6_NAV_I 20
CH6_LOITER_RATE_KP 22
CH6_LOITER_RATE_KI 28
CH6_LOITER_RATE_KD 23
CH6_AHRS_YAW_KP 30
Способ 2: Летающий Attitude Tuning с CH6:
В этом случае вы будете настраивать свой коптер во время полета.
Это предполагает, что коптер уже довольно хорошо летает и хорошо управляется и, что пилот имеет достаточно опыта, чтобы легко сохранить коптер на уровне глаз и в том же месте в течение по крайней мере 60 секунд. Также для этот способа предпочтительно иметь открытое пространство, возможно 10mx10m (30ftx30ft).
Следуйте установкам в способе 1 описанном выше.
Первым делом для Rate_P выберите значение + и - около 30% -40% от значения по умолчанию (так для Rate_P установить "нижнее" в 0,100 и "верхнее" в 0,180 от дефолта 0,140) Будьте осторожны, чтобы не установить эти значения неправильно. - не установите 0,100 как 1,000 или 0,010!
Зависните на высоте около 1,5 м (5 футов) и погоняйте коптер немного влево и вправо, затем приземлитесь и вращайте крутилку или слайдер, который управляет каналом, или если вы можете летать и поворачивать крутилку или слайдер делайте настройку прямо в полете, обращая внимание на разницу и выберите тот стиль полета в, котором Вы "чувствуете себя" наилучшим образом. Более высокие значения могут привести к колебаниям, так что следует немного снизить, пока коптер не будет летать без колебаний, но не слишком вяло.
Узнать полученное значение параметра можно способом описанным для варианта 1.
Примечание: (Задайте значения I в целом маленьким, например, 0.000-0.100.)
Как работают P и I:
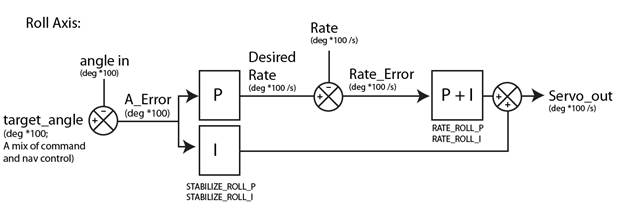
Новый контроллер для AC2 является вариацией вокруг следующей идеи. Возьмем ошибку угла и сгенерируем желаемую скорости вращения. Эта скорость вращения (в градусах) сравнивается с текущей скоростью и умноженной на Rate_P. Значение преобразуется в ШИМ и посылается к двигателям. Это дает нам множество преимуществ, таких как возможность указать желаемую скорость перемещения, вращения или изменения высоты. Она также дает нам второй параметр - I, позволяющий контролировать то, как мы должны компенсировать параметры для достижения желаемой скорости.
|
|
|
|
|
Дата добавления: 2015-05-29; Просмотров: 717; Нарушение авторских прав?; Мы поможем в написании вашей работы!