КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Реализация интегрирования в СЧПУ
|
|
|
|
Интеграторы в СЧПУ всегда работают в дискретном виде, используя импульсную последовательность (унитарный код) или цифровой код. Это связано с требованиями точности, так как именно интеграторы обеспечивают необходимую точность формообразования детали.
При выполнении интеграторов в аппаратном виде (аппаратное моделирование) используются преобразователи кода в частоту. При этом выход интегратора – унитарный код (последовательность импульсов, общее количество которых задает перемещение, частота поступления – скорость по оси). Квант перемещения здесь постоянен – один импульс частоты, т.е. для линейной интерполяции D x = D y = D,
 ,
,  .
.
Временной интервал между импульсами переменен и зависит от осевой скорости  ,
,  ,
,  . Это и является одним из недостатков данного способа интегрирования, когда максимальная частота выдачи импульсов, а значит, и максимальная скорость перемещения ограничены возможностью СЧПУ (обычно
. Это и является одним из недостатков данного способа интегрирования, когда максимальная частота выдачи импульсов, а значит, и максимальная скорость перемещения ограничены возможностью СЧПУ (обычно  м/с).
м/с).
При выполнении интеграторов программным путем на ЭВМ происходит прямое решение дифференциальных уравнений (обычно простейшим способом – методом Эйлера). Квант по времени постоянен и зависит от возможностей ЭВМ и от полосы пропускания непрерывной части. Величина приращения по координате за квант по времени зависит от максимально возможных скорости перемещения и ускорения на данном станке с данными приводами.
Уравнения интегрирования по i -й координате на j+ 1 шаге:
 ,
,  ,
,
где  .
.
Для линейной интерполяции при Vk = const
 ,
,  .
.
При этом операции умножения заменяются операциями сложения и сдвига (деления пополам). На рис. 9.6, 9.7 приведены графики, демонстрирующие выходной код на приводы после интерполяции: круговой или линейной, при постоянном кванте перемещений (унитарный код) или постоянном кванте времени (цифровой код, где ±1ЕМР – вес единицы младшего разряда).
|
|
|
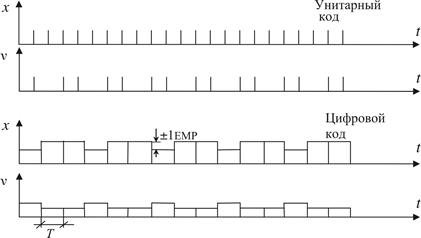
Рис. 9.6. Характер выходных сигналов интерполятора при линейной интерполяции для аппаратных и микропроцессорных СЧПУ
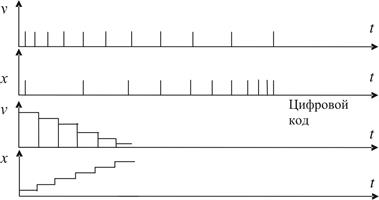
Рис. 9.7. Характер выходных сигналов интерполятора при круговой интерполяции для аппаратных и микропроцессорных СЧПУ
Конкретные системы УЧПУ с аппаратной реализацией интерполятора рассмотрены ниже.
9.5. СЧПУ «Контур-2ПТ»*
Интегратор выполнен на ПКЧ (преобразователь код – частота) последовательного преобразования, называемый здесь «умножителем частоты», работает в двоично-десятичном коде только для линейной интерполяции. Умножители частоты называют также интегратором последовательного переноса или ПКЧ последовательного действия.
9.6. СЧПУ «Н22»**
Интегратор выполнен на ПКЧ для двух координат в двоичном коде для линейной и круговой интерполяции при использовании алгоритма оценочной функции.
В этом случае на каждом шаге решается алгебраическое уравнение траектории.
Для линейной интерполяции:
 – в непрерывной форме, где D y, D x принимаем положительными (1-й квадрант).
– в непрерывной форме, где D y, D x принимаем положительными (1-й квадрант).
 – в дискретной форме в i-м такте интегрирования.
– в дискретной форме в i-м такте интегрирования.
 – оценочная функция, т.е ошибка между непрерывной величиной и ее дискретной формой. Движение в очередном такте зависит от знака оценочной функции (рис. 9.8).
– оценочная функция, т.е ошибка между непрерывной величиной и ее дискретной формой. Движение в очередном такте зависит от знака оценочной функции (рис. 9.8).
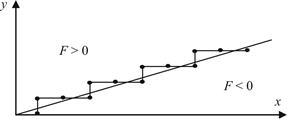
Рис. 9.8. Интерполяция в функции знака
оценочной функции
Если F > 0, то в следующем такте надо делать перемещение по x, если F < 0, то по y.
Определим оценочную функцию в следующем такте, если сделали перемещение (один импульс по y или по x). Учитывая, что  ,
,  , имеем
, имеем


Таким образом, на каждом шаге интегрирования надо рассчитывать оценочную функцию. На практике, если имеет место перемещение по меньшей координате, производят перемещение и по большей координате.
Пример:
Пусть D y = 5, D x = 7. (Нужно сделать 12 шагов.)
|
|
|
F (Y0,, X0) = 0
1 шаг по большей координате (по Х).
F (Y0, X1) = F (Y0, X0) –D y = 0 – 5 = –5.
2 шаг так как F (Y0, X1) < 0, делаем следующий шаг по Y.
F (Y1, X1) = F (Y0, X1) +7 = –5+7 = 2.
3 шаг так как F (Y1, X1) > 0, делаем следующий шаг по Х.
F (Y1, X2) = F (Y1, X1) –5 = 2–5 = –3.
4 шаг по Y.
F (Y2, X2) = –3+7 = 4.
5 шаг по Х.
F (Y2, X3) = 4–5 = –1.
6 шаг по Y.
F (Y3, X3) = –1+7 = 6.
7 шаг по Х.
F (Y3, X4) = 6–5 = 1.
8 шаг по Х.
F (Y3, X5) = 1–5 = –4.
9 шаг по Y.
F (Y4, X5) = –4+7 = 3.
10 шаг по Х.
F (Y4, X6) = 3–5 = –2.
11 шаг по Y.
F (Y5, X6) = –2+7.
12 шаг по Х.
F (Y5, X7) = 5–5 = 0.
Диаграмма движения представлена на рис. 9.9.
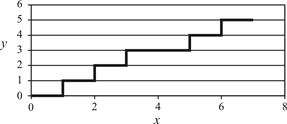
Рис. 9.9. Диаграмма движения при интерполяции
по оценочной функции
9.7. СЧПУ «Н33»*
Интегратор выполнен на ПКЧ параллельного действия, работающем в двоичном коде. Способ интегрирования называется цифровым дифференциальным анализатором. Это наиболее совершенная аппаратная стойка ЧПУ. Вначале она реализовывалась на простых микросхемах, затем на БИС.
|
|
|
|
|
Дата добавления: 2015-05-29; Просмотров: 762; Нарушение авторских прав?; Мы поможем в написании вашей работы!