КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Микропроцессорные стойки ЧПУ
|
|
|
|
Первоначально микропроцессорные СЧПУ, проведя интерполяцию программным путем, выдавали задание в двоичном коде на фазовую систему связи с электроприводом (см. рис. 10.7, 10.8).
В дальнейшем от фазовых устройств связи с электроприводом отказались, возложив такие операции, как сравнение задания и сигнала обратной связи, реализацию пропорционального регулятора положения, скоростную компенсацию задающего сигнала (частичная инвариантность по управлению), на ЭВМ.
Структура одного канала связи с приводом представлена на рис. 10.9. В обратной связи по положению с фазовращателем обычно используют как ПЧК при высоких скоростях, так и ПФК при малой скорости.
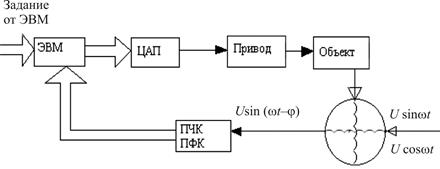
Рис. 10.9. Структура следящего электропривода
с микропроцессорным регулятором положения
Если используется фотоимпульсный датчик положения, структура еще более упрощается. В канале обратной связи используется тогда ПЧК, а иногда и ПЧН для получения сигнала обратной связи по скорости (см. рис. 10.9).
Контрольные вопросы
1. Чем отличаются позиционные системы ЧПУ от контурных?
2. Как обеспечивается частичная инвариантность по управлению (исключение скоростной ошибки в следящем электроприводе)?
3. Поясните принцип фазового индикаторного режима устройства связи с электроприводом контурной СЧПУ.
4. Какие задачи реализует ЭВМ при управлении следящим электроприводом в СЧПУ типа CNC?
5. Рассчитайте максимально возможную рабочую скорость подачи при разрешающей способности датчика h = 0,001мм на шаге 4 мм и при максимальной опорной частоте интерполятора f оп.max = 10 мГц.
11. Микропроцессорные СЧПУ
и тенденции развития
В предыдущих главах пособия был изложен ряд локальных вопросов систем автоматизации технологических процессов, позволяющих более качественно изучать системы автоматизации в конкретных отраслях, в том числе в машиностроении.
Были рассмотрены следующие темы:
¨ история, тенденции, эффективность автоматизации в машиностроении;
¨ информационные потоки, кодирование и преобразование информации;
¨ структура, принципы функционирования модулей СЧПУ, реализующие следующие задачи:
– подготовка управляющих программ;
– решение геометрической задачи (интерполяция) при изготовлении деталей;
– аппаратная и микропроцессорная реализации цифрового контура положения.
В главе 11 имеется возможность обобщить возможности существующих систем ЧПУ, отметить тенденции развития.
11.1. Архитектура и возможности микропроцессорных систем управления типа СNС до 1990 года (однопроцессорные МПС КМ85, 2Р-32М, 2С42-45, многопроцессорные МПС Нейрон И3, МС2101,
3С150, S8600)
Структура промышленных МПС постоянно совершенствовалась. Вначале развивались однопроцессорные МПС с одним вычислителем, решающим все задачи. Ресурсов вычислительной системы обычно не хватает, что ограничивает развитие функциональных возможностей системы управления, накладывая ограничения на число управляемых координат, минимальную дискретность по уровню и времени перемещения, максимальную скорость интерполируемой подачи, уровень сервиса для оператора и т.д.
Есть несколько путей повышения вычислительных ресурсов. Возможен переход на 32-разрядные МП. Однако централизованная иерархическая архитектура оказалась в промышленных системах не единственной. Быстродействующий вычислитель требует быстродействующих магистралей и периферийных устройств. В однопроцессорных системах оказался востребованным способ использования интеллектуальных микропроцессорных контроллеров периферии, автоматики, приводов подач, составляющих соответственно интерфейсы периферии. Интеллектуальные контроллеры разгружают вычислитель от операций ввода-вывода, решают локальные задачи управления периферией: управление приводами, электроавтоматикой (ПК) и т.д.
Многопроцессорные МПС являются дальнейшим развитием вычислительных возможностей. В этом случае две или более микроЭВМ работают относительно независимо друг от друга, каждая решает свои задачи. Обмен между ЭВМ осуществляется на уровне обмена информацией, использования общей памяти, т.е. МПС приближается к локальной вычислительной сети. Данные системы незаменимы при построении ГПС, когда требуется объединить в работе ряд технологических модулей.
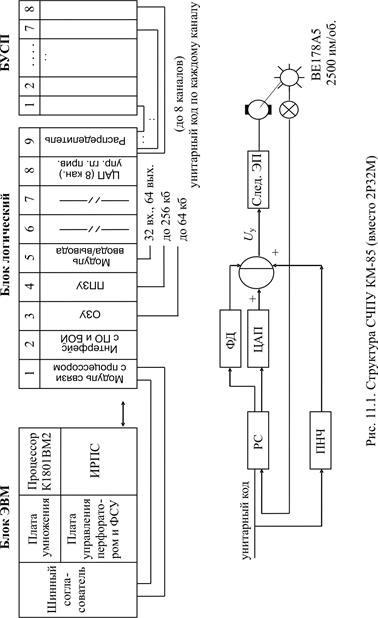
Рассмотрим конкретные примеры архитектурных вариантов МПС 80-х годов прошлого века. На рис. 11.1 приведена структура СЧПУ КМ-85 (аналог 2Р32М). СЧПУ имеет многие элементы от аппаратных строк ЧПУ (перфоратор, фотосчитыватель). Контуры положения для приводов подач выполнены аппаратным способом на основе реверсивного счетчика и фазового детектора (фазовый детектор работает на рассогласовании одного периода фазы). ЦАП на каждый канал выполнены как преобразователи двоичного кода в частоту (унитарный код).
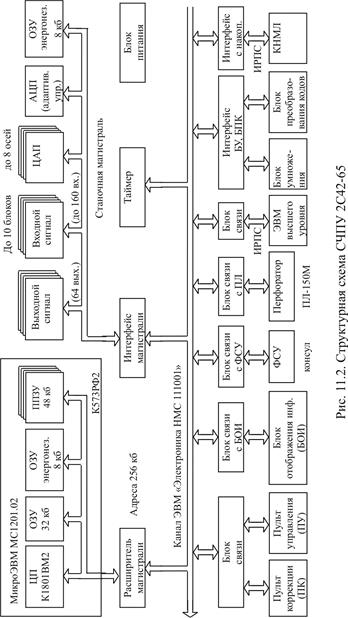
На рис. 11.2 приведена структурная схема СЧПУ 2С42-65. Структура, в принципе, не отличается от предыдущей, однако контуры положения уже реализованы программным способом. Имеется блок умножения для операций с плавающей запятой, ВЗУ КНМЛ. Однако управлять более чем тремя осями одновременно данная структура не может – не хватает ресурсов.
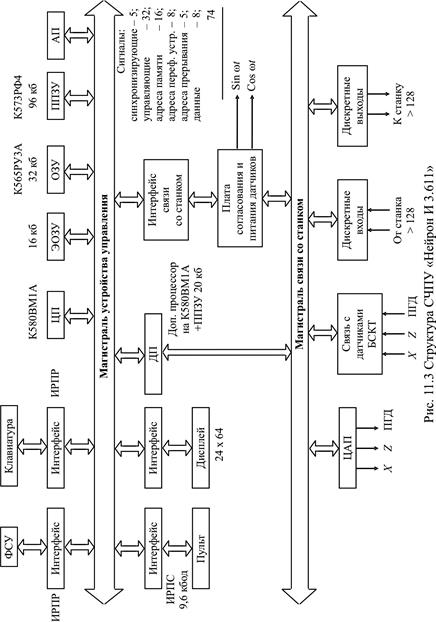
На рис. 11.3 приведена структурная схема СЧПУ «Нейрон Н3.611». Данная СЧПУ является аналогом СЧПУ «Вектор» фирмы Olivetti. Это единственная отечественная МПС до 90-х годов для управления позиционными и контурными системами, выполненная на элементах Intel-й ветви МП. В системе основной вычислитель выполнен на МП К580ВМ1А и арифметическом процессоре АП. Дополнительный ведомый процессор ДП является интеллектуальным контроллером, обеспечивает обмен с приводами и электроавтоматикой и первоначальную обработку информации в том числе для выполнения роли регуляторов положения в фазово-импульсных контурах. СЧПУ управляет двумя приводами подач
и главным приводом. Данная СЧПУ нашла малое применение
в России.
На рис. 11.4 приведена структурная схема СЧПУ 3С-150 (третье поколение СЧПУ). Данная стойка имеет модульную конструкцию и большие возможности за счет:
¨ большого объема памяти энергонезависимого динамического ОЗУ, защищенного по коду Хемминга, и ППЗУ, управляемых диспетчером памяти МРАП;
¨ большого набора интеллектуальных контроллеров, выполненных с применением МП К580ВМ80А;
¨ модуля расширенной арифметики МРА как сопроцессора для операций с плавающей запятой.
Однако данная СЧПУ и другие из этой серии (3С-120, 3С-180), созданные в конце 80-х годов, не успели стать отлаженными до начала разрушительных процессов в России. СЧПУ получилась габаритной, с большим числом плат и недостаточно надежной.

На рис. 11.5 приведены некоторые из модулей ЧПУ типа S8600MC фирмы Allen Bradley. Эту СЧПУ отличают большие возможности наращивания, большой объем памяти (адресное пространство до 1 Мб), большой набор интеллектуальных контроллеров, в том числе контроллеры электроавтоматики (ПК), электроприводов, периферии, сетевой контроллер. Возможны различные типы датчиков: ФЭД, линейные индуксины, резольверы, кодовые, контроллеры входа-выхода дискретных сигналов имеют 32 входа и 32 выхода (24 В, 0,2 А).
До 1990 года выпускались и другие микропроцессорные СЧПУ: МС2106, МС2109, CNC600, CNC645, SINUMERIK 8E, BOSCH микро8, BOSCH Alfa2, РС2000, TESLA и др.
Из обзора микропроцессорных систем ЧПУ следует, что тенденцией развития локальных МПС является все более широкое применение микропроцессорных контроллеров, которые берут на себя решение определенных задач управления, обработки информации, освобождая от рутинных (повторяющихся) задач ведущий вычислитель. Роль контроллеров непрерывно возрастает и иногда может стать доминирующей. Контроллеры уже включают в себя кроме МП-го буфера для согласования с СМ локальную шину, буфер для согласования МП с локальной шиной, модули ввода-вывода для связи с объектом управления. Таким образом, интеллектуальный контроллер есть управляющая микроЭВМ, но без прямой связи с оператором и без средств отображения. МикроЭВМ контроллера всегда является ведомой. ЦП принимает аварийные и другие ответственные прерывания и оперативно обрабатывает их. Интеллектуальные контроллеры и основной вычислитель обмениваются между собой информацией, как правило, через программно-аппаратное окно – общую память.
Способы организации окна (общей памяти – почтового ящика) даны на рис. 11.6.
В схеме на рис. 11.6, а роль почтового ящика играют буферные регистры канала передачи информации: последовательные или параллельные. В этом случае модули ЭВМ могут располагаться на достаточном удалении друг от друга.
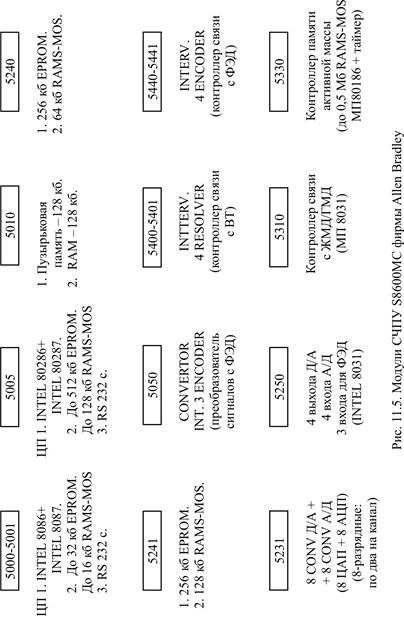
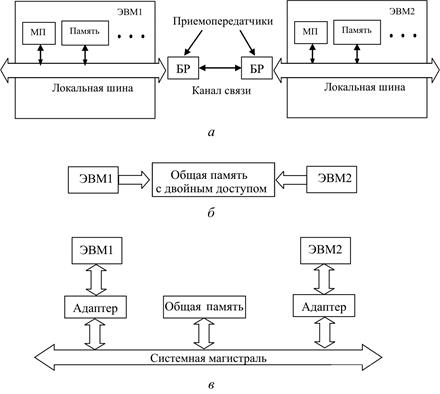
Рис. 11. 6. Архитектура многопроцессорных СЧПУ
В схеме на рис. 11.6, б используется память с двойным доступом – 2-портовая память. Если идет обмен с общей памятью с одной магистрали, то другая при обращении на запись или чтение ожидает окончания обмена.
В схеме на рис. 11.6, в рассматривается случай, когда локальная и системная магистрали не совпадают. Переход адаптера в логическое соединение в определенном направлении возможен при наличии запроса на СМ со стороны ЭВМ и готовности СМ к обмену (ее незанятости).
Фактически структуры, представленные на рис. 11.6, являются структурами распределенной многомашинной архитектуры, организованной по принципу микролокальной вычислительной сети. Пример такой системы – СЧПУ «Электроника МС2101». Данная система допускает гибкую комплектацию машин (2–3 ЭВМ), связанных по любой топологии последовательными телеграфными каналами, а также гибкую комплектацию модулей внутри отдельной машины.
Мультиплексорные СЧПУ и системы управления, организованные по принципу ЛВС, перспективны, поскольку в этом случае достигается:
¨ унификация оборудования;
¨ расширение возможностей наращивания по заказу потребителя;
¨ простота подключения инструментальной ЭВМ для эпизодического подключения в цепях наладки, программирования.
|
|
|
|
|
Дата добавления: 2015-05-29; Просмотров: 2960; Нарушение авторских прав?; Мы поможем в написании вашей работы!