КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Изобретатель волновой передачи — американский инженер У. Массер (1959)
|
|
|
|
Волновые зубчатые передачи
Волновой передачей (рис. 2.32.) называется зубчатый или фрикционный механизм, предназначенный для передачи и преобразования движения (обычно вращательного), в котором движение преобразуется за счет волновой деформации венца гибкого колеса специальным звеном (узлом) – генератором волн. Основными элементами дифференциального волнового механизма являются: входной или быстроходный вал с генератором волн, гибкое колесо с муфтой, соединяющей его с первым тихоходным валом, жесткое колесо, соединенное со вторым тихоходным валом, корпус.
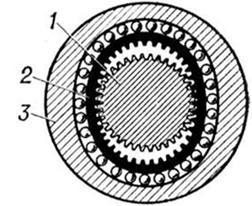
Рис. 2.32. Волновая передача:
1 – водило; 2 – вращающееся гибкое колесо; 3 – корпус передачи.
Волновые зубчатые передачи являются разновидностью планетарных передач, у которых одно из колес гибкое.
Волновая зубчатая передача (рис 2.33) включает в себя жесткое зубчатое колесо b с внутренними зубьями и вращающееся гибкое колесо g c наружными зубьями. Гибкое колесо входит в зацепление с жестким в двух зонах с помощью генератора волн (например, водила h с двумя роликами), который соединяют с корпусом передачи b.
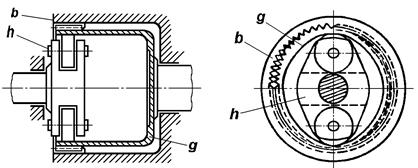
Рисунок 2.33.Волновая зубчатая передача:
b – жесткое зубчатое колесо с внутренними зубьями; g – гибкое вращающееся колесо с внутренними зубьями; h – водило с двумя роликами
Гибкое зубчатое колесо представляет собой гибкий цилиндр, один конец которого соединен с валом и сохраняет цилиндрическую форму, а другой конец имеет зубья. Генератор волн служит для образования и движения волны деформации на гибком зубчатом колесе.
Генераторы волн бывают механические, пневматические, гидравлические, электромагнитные. Механические генераторы могут быть двухроликовыми, четырехроликовыми, дисковыми, кольцевыми и кулачковыми. Генератор волн может располагаться внутри гибкого колеса или вне его. Число волн – любое.
Волновые механизмы можно рассматривать как одну из разновидностей многопоточных планетарных механизмов, так как они обладают многозонным, а в случае зубчатого механизма, и многопарным контактом выходного звена с гибким колесом. Многозонный контакт обеспечивается за счет формы генератора волн (кулачок чаще с двумя, редко с тремя выступами), многопарный – за счет податливости зубчатого венца гибкого колеса. Такое сочетание позволяет волновым механизмам передавать значительные нагрузки при малых габаритах.
Податливость зубчатого венца обеспечивает достаточно равномерное распределение нагрузки по зубьям, находящимся в зоне зацепления.
При номинальных нагрузках процент зубьев находящихся в зацеплении составляет 15-25 % от общего их числа. Поэтому в волновых передачах применяется мелкомодульное зацепление, а числа зубьев колес лежат в пределах от 100 до 600. Зона зацепления в волновой зубчатой передаче совпадает с вершиной волны деформации.
По числу зон или волн передачи делятся на одноволновые, двухволновые и так далее. Передачи с числом волн более трех применяются редко. Распределение передаваемых усилий по нескольким зонам уменьшает нагрузку на элементы пар и позволяет существенно уменьшать габаритные размеры и массу механизмов.
Многозонный и многопарный контакт звеньев существенно увеличивает жесткость механизма, а за счет осреднения ошибок и зазоров, уменьшает мертвый ход и кинематическую погрешность механизма. Поэтому волновые механизмы обладают высокой кинематической точностью и, несмотря на наличие гибкого элемента, достаточно вы-сокой жесткостью. Образующиеся в структуре волнового механизма внутренние контуры, увеличивают теоретическое число избыточных или пассивных связей в механизме. Однако гибкое колесо за счет податливости компенсирует ряд возникающих перекосов. Поэтому при изготовлении и сборке волновых механизмов число необходимых компенсационных развязок меньше чем в аналогичных механизмах с жесткими звеньями.
Преимущества и недостатки волновых передач:
- Волновые передачи позволяют осуществлять большие передаточные отношения в одной ступени: минимальное – 70 (ограничивается изгибной прочностью гибкого зубчатого венца), максимальное – 300…320 (ограничивается минимально допустимой величиной модуля, равной 0,2…0,15 мм). При этом КПД равен 85…78 %,как и у планетарных передачах при тех же передаточных отношениях.
- Волновые передачи имеют меньшую массу, меньшие габариты, обеспечивают более высокую кинематическую точность, имеют меньший мертвый ход, обладают высокой демпфирующей способностью (в 4…5 раз большей, чем у обычных), работают с меньшим шумом.
- Малый приведенный к входному валу момент инерции (для механизмов с дисковыми генераторами волн).
- Герметические волновые передачи передают вращение в герметизированные полости с химической агрессивной и радиоактивной средой, в полости с высоким давлением и глубоким вакуумом, а также являются приводами герметических вентилей. Например, в американской космической ракете «Кентавр» (60-е гг. 20 в.) герметическая волновая передача использована в механизме вентиля системы жидкого кислорода, что исключило утечку кислорода и повысило взрыво- и пожаробезопасность.
К недостаткам волновых передач относятся:
- меньшая приведенная к выходному валу крутильная жесткость;
- сложная технология изготовления гибких зубчатых колес (требуется специальная технологическая оснастка);
- мелкие модули зацепления (0,15…0,2 мм);
- ограниченные частоты вращения генератора волн из-за возникновения вибраций.
Волновые передачи применяются в различных отраслях техники: в приводах грузоподъёмных машин, конвейеров, различных станков, в авиационной и космической технике, в точных приборах, исполнительных механизмах систем с дистанционным и автоматическим управлением, в приводах остронаправленных радарных антенн систем наблюдения за космическими объектами и т.п.
Расчет волновых зубчатых передач отличается от расчета обычных зубчатых передач тем, что учитывает изменения первоначальной формы зубчатых венцов и генератора волн от упругих деформаций.
Экспериментальные исследования показывают, что волновые передачи становятся неработоспособными по следующим причинам.
1. Разрушение подшипников генератора волн от нагрузки в зацеплении или из-за значительного повышения температуры. Повышение температуры может вызвать недопустимое уменьшение зазора между генератором и гибким зубчатым венцом. Номинальный зазор на диаметр примерно равен 0,00015 диаметра оболочки. Возрастание нагрузки и температуры в некоторых случаях связано с интерференцией вершин зубьев на входе в зацепление, появляющейся при больших изменениях первоначальной формы генератора волн, гибкого и жесткого зубчатых венцов.
2. Проскок генератора волн при больших крутящих моментах (по аналогии с предохранительной муфтой). Проскок связан с изменением формы генератора волн, гибкого и жесткого зубчатых венцов под нагрузкой вследствие их недостаточной радиальной жесткости или при больших отклонениях радиальных размеров генератора. Проскок наступает тогда, когда зубья на входе в зацепление упираются один в другой поверхностями вершин. При этом генератор волн сжимается, а жесткое колесо распирается в радиальном направлении, что приводит к проскоку.
Для предотвращения проскока радиальное упругое перемещение гибкого колеса предусматривают больше номинального, а зацепление собирают с натягом или увеличивают размеры передачи.
3. Поломка гибкого колеса от трещин усталости, появляющихся вдоль впадин зубчатого венца при напряжениях, превышающих предел выносливости. С увеличением толщины гибкого колеса напряжения в нем от полезного передаваемого момента уменьшаются, а от деформирования генератором волн увеличиваются. Поэтому есть оптимальная толщина.
Долговечность гибкого элемента легко обеспечивается при передаточном отношении в ступени и> 120 и чрезвычайно трудно при и <80, так как потребная величина радиального упругого перемещения увеличивается с уменьшением передаточного отношения.
4. Износ зубьев, наблюдаемый на концах, обращенных к заделке гибкого колеса. Износ в первую очередь зависит от напряжений смятия на боковых поверхностях от полезной нагрузки.
Часто возникает износ при сравнительно небольших нагрузках, связанный с интерференцией вершин зубьев от упругих деформаций звеньев под нагрузкой. Во избежание этого геометрические параметры зацепления следует выбирать так, чтобы в ненагруженной передаче в одновременном зацеплении находилось 15...20 % зубьев. Между остальными зубьями в номинальной зоне зацепления должен быть боковой зазор.
При увеличении крутящего момента зазор выбирается и число одновременно зацепляющихся зубьев увеличивается из-за перекашивания зубьев гибкого колеса во впадинах жесткого колеса от закрутки оболочки и вследствие других деформаций колес.
5. Пластическое течение материала на боковых поверхностях зубьев при больших перегрузках.
Анализ причин выхода из строя волновых передач показывает, что при передаточных отношениях и> 100...120 несущая способность обычно ограничивается стойкостью подшипника генератора волн; при и ≤100 — прочностью гибкого элемента, причем уровень напряжений определяется в первую очередь величиной радиального упругого перемещения и в меньшей степени вращающим моментом.
Принцип действияволновых передач (рис 2.34) заключается в сл6едующем. Число зубьев гибкого колеса несколько меньше числа зубьев неподвижного элемента. Число волн деформации равно числу выступов на генераторе. В вершинах волн зубья гибкого колеса полностью входят в зацепление с зубьями жёсткого, а во впадинах волн - полностью выходят из зацепления. Линейная скорость волн деформации соответствует скорости вершин выступов на генераторе, то есть в гибком элементе существуют бегущие волны с известной линейной скоростью. Разница чисел зубьев жёсткого и гибкого колёс обычно равна (реже кратна) числу волн деформации.
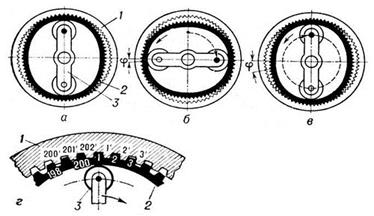
Рис. 2.34. Схема работы зубчатой волновой передачи:
а — исходное положение генератора; б — генератор повернут на 90°; в — генератор повернут на 360°; г — зона зацепления;
1 — жесткое колесо; 2 — гибкое колесо; 3 — генератор волн
Например, при числе зубьев гибкого колеса 200, неподвижного элемента - 202 и двухволновой передаче (два выступа на генераторе волн) при вращении генератора по часовой стрелке первый зуб гибкого колеса будет входить в первую впадину жёсткого, второй во вторую и т.д. до двухсотого зуба и двухсотой впадины. На следующем обороте первый зуб гибкого колеса войдёт в двести первую впадину, второй — в двести вторую, а третий — в первую впадину жёсткого колеса. Таким образом, за один полный оборот генератора волн гибкое колесо сместится относительно жёсткого на 2 зуба.
|
|
|
|
|
Дата добавления: 2015-05-29; Просмотров: 2238; Нарушение авторских прав?; Мы поможем в написании вашей работы!