КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Кинетическая энергия системы
|
|
|
|
Кинетические моменты.Теоремы об изминении кинетических моментов точки и системы.
Теорема о движении центра масс мех. системы.
Рассмотрим движущуюся систему мат. точек М1, М2, Мi, Mn, находящихся под действием внешних и внутренних сил (рис). Положение центра масс системы С определяется равенством
rc = ∑miri/m. Уравнения движения точек этой системы имеют вид
mi d2ri/dt2 = PiE + PiJ; (i = 1, 2, …, n), суммируем эти уравнения:
∑mi d2ri/dt2 =∑ PiE + ∑ PiJ (а). Преобразуем левую часть равенства, учитывая (rc = ∑miri/m) получаем: ∑mi d2ri/dt2 = d2/dt2 * ∑mi ri = d2/dt2 * (mrc) = md2rc/dt2. Геометрическая сумма внутренних сил равна 0. Уравнение (а) приобретает вид: md2rc/dt2 = ∑PiE = RE или
maC = ∑ PiE = RE (в). т.е. произведение массы системы на ускорение её центра масс = геометрической сумме всех действующих на систему внешних сил или главному вектору этих сил. Уравнение (в) выражает теорему о движении центра масс системы, которая формулируется следующим образом: Центр масс мех. сис. движется как мат. точ. массой, равной массе всей системы, к которой приложены все внешние силы действующие на систему.
Проецируя на оси x, y, z – mxC = ∑ XiE = XE
Кинетической энергией системы называется скалярная величина Т, равная арифметической сумме кинетических энергий всех точек системы

Кинетическая энергия является характеристикой и поступательного и вращательного движения системы, поэтому теоремой об изменении кинетической энергии особенно часто пользуются при решении задач.
Если система состоит из нескольких тел, то ее кинетическая энергия равна, очевидно, сумме кинетических энергий этих тел:

Кинетическая энергия – скалярная и всегда положительная величина.
Найдем формулы для вычисления кинетической энергии тела в разных случаях движения.
1. Поступательное движение. В этом случае все точки тела движутся с одинаковыми скоростями, равными скорости движения центра масс. То есть, для любой точки 
или
Таким образом, кинетическая энергия тела при поступательном движении равна половине произведения массы тела на квадрат скорости центра масс. От направления движения значение Т не зависит.
2. Вращательное движение. Если тело вращается вокруг какой-нибудь оси Оz (см. рис.46), то скорость любой его точки  , где
, где  - расстояние точки от оси вращения, а w- угловая скорость тела. Подставляя это значение и вынося общие множители за скобку, получим:
- расстояние точки от оси вращения, а w- угловая скорость тела. Подставляя это значение и вынося общие множители за скобку, получим:
Величина, стоящая в скобке, представляет собою момент инерции тела относительно оси z. Таким образом, окончательно найдем:

т. е. кинетическая энергия тела при вращательном движении равна половине произведения момента инерции тела относительно оси вращения на квадрат его угловой скорости. От направления вращения значение Т не зависит.
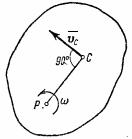
Рис.46
При вращении тела вокруг неподвижной точки кинетическая энергия определяется как (рис.47)

или, окончательно,
 ,
,
где Ix, Iy, Iz – моменты инерции тела относительно главных осей инерции x 1, y 1, z 1 в неподвижной точке О;  ,
,  ,
,  – проекции вектора мгновенной угловой скорости
– проекции вектора мгновенной угловой скорости  на эти оси.
на эти оси.
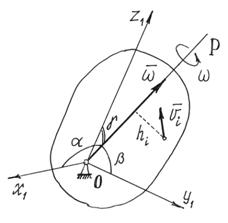
Рис.47
3. Плоскопараллельное движение. При этом движении скорости всех точек тела в каждый момент времени распределены так, как если бы тело вращалось вокруг оси, перпендикулярной к плоскости движения и проходящей через мгновенный центр скоростей Р (рис.46). Следовательно
 ,
,
где  - момент инерции тела относительно названной выше оси, w- угловая скорость тела. Величина в формуле будет переменной, так как положение центра Р при движении тела все время меняется. Введем вместо постоянный момент инерции
- момент инерции тела относительно названной выше оси, w- угловая скорость тела. Величина в формуле будет переменной, так как положение центра Р при движении тела все время меняется. Введем вместо постоянный момент инерции  , относительно оси, проходящей через центр масс С тела. По теореме Гюйгенса
, относительно оси, проходящей через центр масс С тела. По теореме Гюйгенса  , где d=PC. Подставим это выражение для . Учитывая, что точка Р - мгновенный центр скоростей, и, следовательно,
, где d=PC. Подставим это выражение для . Учитывая, что точка Р - мгновенный центр скоростей, и, следовательно,  , где
, где  - скорость центра масс С, окончательно найдем:
- скорость центра масс С, окончательно найдем:
 .
.
Следовательно, при плоскопараллельном движении кинетическая энергия тела равна энергии поступательного движения со скоростью центра масс, сложенной скинетической энергией вращательного движения вокруг центра масс.
4) Для самого общего случая движения материальной системы кинетическую энергию помогает вычислить теорема Кенига.
Рассмотрим движение материальной системы как сумму двух движений (рис.48). Переносного – поступательного движения вместе с центром масс С и относительного – движения относительно поступательно движущихся вместе с центром масс осей x 1, y 1, z 1. Тогда скорость точек  . Но переносное движение – поступательное. Поэтому переносные скорости всех точек равны, равны
. Но переносное движение – поступательное. Поэтому переносные скорости всех точек равны, равны  . Значит,
. Значит,  и кинетическая энергия будет
и кинетическая энергия будет


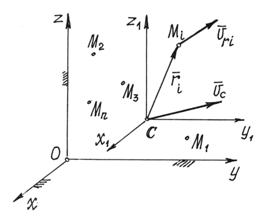
Рис.48
По определению центра масс его радиус-вектор в подвижной системе  (центр масс находится в начале координат), значит, и
(центр масс находится в начале координат), значит, и  . Производная по времени от этой суммы также равна нулю:
. Производная по времени от этой суммы также равна нулю:
 .
.
Поэтому, окончательно, кинетическая энергия системы
 (1)
(1)
Кинетическая энергия материальной системы равна сумме кинетической энергии при поступательном движении вместе с центром масс и кинетической энергии ее при движении относительно координатных осей, поступательно движущихся вместе с центром масс.
В общем случае движения тела, которое можно рассматривать как сумму двух движений (переносного – поступательного вместе с центром масс С и относительного – вращения вокруг точки С), по теореме Кенига (1) получим
 или
или  ,
,
где Ix, Iy, Iz – главные центральные оси инерции тела.
31.Законы сохранения кинетических моментов.Дифференциальное уравнение вращения твердого тела вокруг своей оси..
2.3. Закон сохранения кинетического момента системы относительно неподвижной точки
Формулировка закона: если при движении системы сумма моментов внешних сил относительно неподвижной оси  равна нулю, то кинетический момент системы относительно этой оси есть величина постоянная, т. е. если
равна нулю, то кинетический момент системы относительно этой оси есть величина постоянная, т. е. если
 , то
, то  , (2.5)
, (2.5)
где  и
и  – кинетические моменты в 1-м и 2-м положениях системы.
– кинетические моменты в 1-м и 2-м положениях системы.
Используя условие (2.5), можно решать задачи по определению начальных или конечных скоростей тел системы, определять законы изменения этих скоростей.
Рассмотрим методику решения подобных задач:
– изображаем систему в произвольный момент времени, показывая все внешние силы; убеждаемся, что сумма моментов внешних силотносительно неподвижной оси равна нулю, т. е. таким образом:
– изображаем систему в первом положении и находим ;
– изображаем систему во втором положении и находим ;
– используем равенство (2.5), составляем уравнение, из которого находим искомую величину.
Задача 2.2 (10). Диск весом  радиусом радиусом  вращается вокруг оси вращается вокруг оси  (рис. 2.5), момент инерции (рис. 2.5), момент инерции  диска задан. По радиусу диска задан. По радиусу  к центру диска движется с постоянной относительной скоростью к центру диска движется с постоянной относительной скоростью  точка весом точка весом  . Определить закон изменения угловой скорости диска, если в начальный момент точка находилась на ободе диска, а угловая скорость диска равна . Определить закон изменения угловой скорости диска, если в начальный момент точка находилась на ободе диска, а угловая скорость диска равна  .
Решение
Внешние силы .
Решение
Внешние силы  и и  не дают момента относительно оси , поэтому
. не дают момента относительно оси , поэтому
.
| 
|
Кинетический момент системы относительно оси в начальном и произвольном положениях определяется с применением формул (2.2), (2.3):
 ,
,
 ,
,
где  – путь, пройденный точкой за время
– путь, пройденный точкой за время  (рис. 2.5).
(рис. 2.5).
Подставляя затем и в равенство (2.5), получим
 .
.
Отсюда
 .
.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 739; Нарушение авторских прав?; Мы поможем в написании вашей работы!