КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Введение 3 страница. Числовой пример 3.1. Рассмотрим электростатический гироскоп со сплошным бериллиевым ротором, физические и геометрические размеры к
|
|
|
|
 , (3.18)
, (3.18)
Где
 ,
,
Числовой пример 3.1. Рассмотрим электростатический гироскоп со сплошным бериллиевым ротором, физические и геометрические размеры которого описаны в примере 2.1. Номинальная угловая скорость ω=1.88*104 сек-1, I1=0.9*I, I2=0.95I, I3=I, α2=0.9, ò2=1.9, ν2=0.058*ω2, логарифмический декремент затухания η=0.02. В этом случае из (3.18) для постоянной времени получаем  =205 часов.
=205 часов.
Числовой пример 3.2. Теперь рассмотрим ЭСГ со сплошным алюминиевым ротором. Физические и механические характеристики оставим таким же, как и в примере 2.22 Тогда из (3.18) находим что =20.3 час.
3.4. Возмущающие моменты, вызванные упругими деформациями ротора.
Полагая в первом уравнений системы (2.21) r=1, получим, учитывая (3.11), уравнение деформации ротора в сферической системе координат, жестко связанной с ротором

Переход от неподвижных осей ξ i к подвижным хi совершается при помощи следующего соотношения

Здесь элементы δ i j матрицы D определяются при помощи матричных преобразований (2.2) и (3.2)

Предположим, что вектор кинетического момента лежит в плоскости ξ1 ξ3, т.е. ξ=0, тогда для направляющих косинусов трехгранника ξi в х1 х2 х3 получим следующее выражения
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 , (3.21)
, (3.21)
 ,
,
 ,
,
 ,
,
С учетом (3.21) получим уравнение деформированной поверхности ротора в трехграннике ξ1 ξ2 ξ3 жестко связанном с корпусом ротора в сферических координатах 
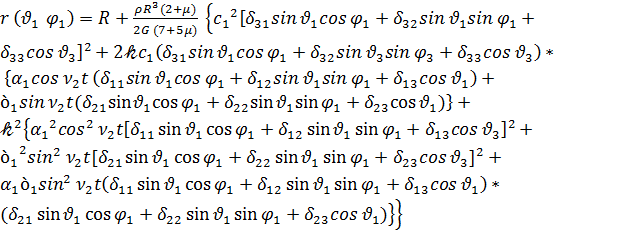 , (3.22)
, (3.22)
Далее проводим асферизацию ротора, как это делалось во второй главе. Это означает, что в (3.22) первое слагаемое с множителем с12, следует положить равным нулю.
Подставляя уравнение (3.22) в формулу (2.67) и выполняя интегрирование по поверхностям электродов (2.68), затем осредняя полученные выражения по явно входящему времени с учетом (3.21) имеем для проекции момента поддерживающих сил, действующих со стороны пятого и шестого электродов следующие выражения:

 ,
,
 ,
, 
где
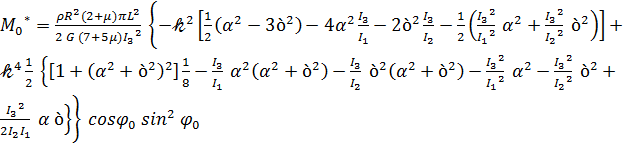 , (3.24)
, (3.24)
Заметим, что уравнения (3.23) совпадают по структуре с уравнениями (2.74), однако, М0 в (2.74) следует заменить на М0*, следовательно, выражение силовой функции для моментов сил (2.81) полученные при анализе поведения вектора кинетического момента динамически симметричного ротора, будут справедливы и при вращении ротора с произвольным эллипсоидом инерции.
Как и в главе 2, остановимся на рассмотрении системы регулирования на постоянном токе. Подставляя (2.81) с учетом (3.24) и (2.83) в (2.79) можно найти проекции моментов сил на неподвижные оси ξi, действующих на ротор со стороны электростатического поля.
Числовой пример 3.3. Рассмотрим электростатический гироскоп, у которого физические и геометрические характеристики описаны в примере 3.1. Опорные напряжения, подаваемые на электроды, относительной зазор между ротором и электродов такие же как в примере 2.3. Пусть вектор кинетического момента лежит в плоскости ξ1 ξ3. По формуле (2.60) получаем Мmax=3.66*10-4 г см2/с2. Это значение достигается, когда 𝓀2=0.5 и когда вектор кинетического момента образует с осью ξ3 угол π/4 или 3π/4, т.е. γ1 γ3 =0.5. По формуле Мmax/L получаем величину возможного ухода электростатического гироскопа ω*=4*10-2 град/час.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 414; Нарушение авторских прав?; Мы поможем в написании вашей работы!