КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Кинематический анализ механизма
|
|
|
|
Графоаналитический метод анализа
Механизм на чертеже изображаем в 12 положениях – через каждые 300, начиная с положения, соответствующего нулевому (кривошип и шатун находятся на одной прямой).
Отсчет перемещений точки S3 ведется от нулевого положения. Построение графиков зависимостей S = Si(t), u = ui(t), a = ai(t) производим в программе EXCEL.
В первый столбец заносим время t, соответствующее каждому из 12 положений. Определяем время по формуле:
t=φ/ω,
где ω=πn/30=3,14*700/30=73,27 рад/с (ω-угловая скорость начального звена OA, nОА – число оборотов кривошипа ОА), φ – угол поворота кривошипа (в рад).
По чертежу измеряем перемещение точки S3 и умножаем их на масштаб длины, результаты заносим во второй столбец таблицы. В третьем и четвертом столбце вводим формулы для вычисления скорости и ускорения.



таблица результатов анализа
| положен | t, сек | φ1, рад | omega | S3, м | V3 | a3 |
| 73,27 | 784,0714 | |||||
| 0,007142 | 0,52333 | 73,27 | 0,023 | 3,220167 | 450,8468 | |
| 0,014285 | 1,046667 | 73,27 | 0,079 | 7,840307 | 646,8449 | |
| 0,021428 | 1,57 | 73,27 | 0,148 | 9,660439 | 254,8302 | |
| 0,02857 | 2,093333 | 73,27 | 0,207 | 8,260376 | -196,018 | |
| 0,035713 | 2,616667 | 73,27 | 0,246 | 5,460249 | -392,036 | |
| 0,042855 | 3,14 | 73,27 | 0,262 | 2,240102 | -450,841 | |
| 0,049998 | 3,663333 | 73,27 | 0,255 | -0,98005 | -450,841 | |
| 0,05714 | 4,186667 | 73,27 | 0,22 | -4,90022 | -548,849 | |
| 0,064283 | 4,71 | 73,27 | 0,159 | -8,54039 | -509,647 | |
| 0,071425 | 5,233333 | 73,27 | 0,084 | -10,5005 | -274,425 | |
| 0,078568 | 5,756667 | 73,27 | 0,022 | -8,6804 | 254,8232 | |
| 0,08571 | 6,28 | 73,27 | 784,0714 |
Графический метод анализа
Построение плана скоростей.
Планы скоростей строим для любых 6 положений механизма, в нашем случае это для 1, 3, 5, 7, 9 и 11 положений.
Для примера построения плана скоростей данного механизма рассмотрим построение этого плана для 1 положения.
Из произвольно выбранной точки p, принятой за полюс плана скоростей откладываем отрезок ра1, изображающий скорость точки А кривошипа:
VA1 = VО (=0) + VА1 О
VA1 = VA1O = ω*OA;
VA1 = ω*O2A = 73,27*0,13 = 9,5 м/с
Определяем масштаб плана скоростей:
μV = VA1/ Ра1 = 9,5 / 100 =0,095 (м/с)/мм
Находим скорость т. В из векторного уравнения:
VB1=VA1+VB1A1, VB1A1 – перпендикулярна В1А1, VB1 – параллельна оси х.
Планы скоростей для всех остальных положений строятся аналогично.
Анализ зубчатой передачи.
Таблица
| параметры | обозначения и расчетные формулы | числовые значения | ||
| Число зубьев | шестерни | Z1 | ||
| колеса | Z2 | |||
| Модуль (по ГОСТ 9563-60**) | m | 5,5 | ||
| Угол наклона зуба | β | |||
| Нормальный исходный контур (по ГОСТ 13755-68) | Угол профиля | α | 20˚ | |
| Коэффициент высоты головки | h* | |||
| Коэффициент радиального зазора | c* | 0,25 | ||
| Коэффициент радиуса кривизны переходной кривой | ρf* | 0,38 | ||
| Коэффициент смещения для прямых зубьев (по ГОСТ 16532-70,приложение2,табл.1,при 10≤Z≤30 | у шестерни | X1 | +0,382 | |
| у колеса | X2 | -0,382 | ||
| межосевое расстояние | Делительное межосевое расстояние | а=(Z1+Z2)m/(2cosβ) | ||
| коэффициент суммы смещения | Х = Х1 +Х2 | |||
| угол прфиля | tgαt = tgα/cosβ | αt = 20˚ | ||
| угол зацепления | inv atω = (2X tgα)/(Z+Z) + inv at | atω = 200 | ||
| Межосевое расстояние | aω =(Z1 + Z2) ·m·cosαt/2cosβ·cos atω | |||
| диаметры зубчатых колес и высота зуба | делительный диаметр | шестерни | d1 = Z1·m/cosβ | 82.5 |
| колеса | d1 = Z1·m/cosβ | 247.5 | ||
| Диамет-ры зубчатых колес и высота зуба | Передаточное число | U = Z2 / Z1 | ||
| Начальный диаметр | шестерни | dω1 = 2·a / (U+1) | 82.5 | |
| колеса | dω1 = 2·a U / (U+1) | 247.5 | ||
| Коэффициент воспринимаемого смещения | y = (a - aω)/m | |||
| Коэффициент уравнительного смещения | ∆y = X - y | |||
| Диаметр вершин зубьев | шестерни | da1 = d1 + 2(h*+ X1 - ∆y)m | 97.7 | |
| колеса | da2 = d2 + 2(h*+ X2 - ∆y)m | 254.3 | ||
| Диаметр впадин | шестерни | df1 =d1 - 2(h*+c* -X1)m | ||
| колеса | df2 =d2 - 2(h*+c* -X2)m | 229.5 | ||
| Высота зуба | шестерни | h1 = 0,5(d a1 -d f1) | 12.375 | |
| колеса | h1 = 0,5(d a2 -d f2) | |||
| Толщина зубьев | Окружная толщина зуба по делит. диаметру | шестерни | S1=0.5πm+2x1m·tgα | 10.148 |
| колеса | S2=0.5πm+2x2m·tgα | 7.122 | ||
| Толщина зуба на диаметре выступов | шестерни | 
| 2,6 | |
| колеса | 
| 4,76 | ||
| Толщина основания зуба | шестерни | 
| 10,695 | |
| колеса | 
| 10,161 | ||
| Основной диаметр | шестерни | db1=d1cosα | 77.55 | |
| колеса | db2=d2cosα | 232.65 | ||
| Угол профиля на окружности | шестерни | cosαa1=db1/da1 | αa1=37.44° | |
| колеса | cosαa2=db2/da2 | αa2=23.79° |
Качественные показатели зацепления
1. Коэффициент перекрытия ε
Коэффициент перекрытия можно подсчитать по формуле:

2. Коэффициенты удельного скольжения λ1и λ2


3. Коэффициент подрезания Xпод

Кинематический анализ планетарной передачи.
Для определения числа зубьев в программе необходимо вычислить U42’-в.
U1-в=U1-2· U42’-в
U1-2= Z2/Z1= 45/15 = 3
U42’-в = U1-в/ U1-2 = 18/ 3 = 6
Данные условия реализуются методом перебора с использованием программы, разработанной на кафедре ТМ Каракуловым М.Н.
Используя программу, получили следующие значения:
Z1 = 18, Z2 = 36, Z3 = 36, Z4 =90, dU=0, p=3(кол. сатилитов).
Проверка полученных данных:
1. Полученное передаточное отношение не должно отличаться больше чем на 4% от заданного. dU=0 – условие выполняется.
2. Условие соосности:
Z1 + Z2 = Z4 – Z3
18+36=90-36 =54 -услов. выполн.
3. Условие соседства:
 - условие выполн.
- условие выполн.
4. Условие собираемости:
а и N — любые целые положительные числа.
 - услов. выполн.
- услов. выполн.
5. Условие технологичности:
Для внешних зацеплений: Z≥17, для внутренних зацеплений: Z > 85 – услов. выполн.
6. Отношение количества зубьев сатилита:

Синтез плоского кулачкового механизма по
заданному закону движения толкателя
Диаграмма толкателя кулачка
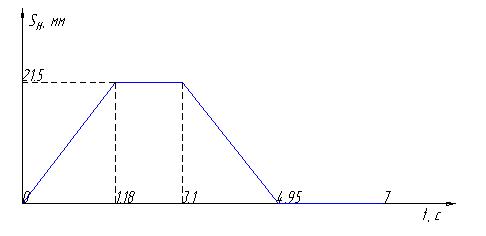
Участки диаграммы можно представить в виде уравнения ST=kt+b. Коэффициенты k и b для каждого из 4-х участков можно найти решая систему уравнений вида:
Для первого участка, ST1=21.5, t1=1.18, система будет иметь вид:
b=0, k=18.22
Для второго участка, ST2=21.5, t2=3,1:

k=0, b=21.5
Для третьего участка, ST3=0, t3=4,95:

k=-11.62, b=57.52
Для четвертого участка, ST4=0, t4=7:

k=0, b=0
Q - угол передачи движения между нормалью и траекторией движения. Принимаем Qmax=30°.

где φ1=ω1t – угол поворота кулачка, e=0(т.к. механизм центральный), SH – постоянная составляющая функции ST(t), SB(t) – переменная составляющая ST(t) (принимаем равную 0).
 ,
,
где VT – скорость толкателя в рассматриваемый момент времени, ω1 – угловая скорость кулачка.  , к=1, Т=7 сек; ω1=2*3,14*1/7=0,897
, к=1, Т=7 сек; ω1=2*3,14*1/7=0,897
Получаем:  . Для того чтобы найти VTmax небходимо продифференцировать закон движения толкателя на всех участках и выбрать наибольшее значение, получаем VTmax = 18,22.
. Для того чтобы найти VTmax небходимо продифференцировать закон движения толкателя на всех участках и выбрать наибольшее значение, получаем VTmax = 18,22.
Для определения постоянной составляющей закона движения кулачка – SH решаем уравнение 
Дальнейшие расчеты проводим в Microsoft Exel.
Таблица результатов
| T | сек | Rp | 5,25 | мм | ||
| w1 | 0,897143 | рад/сек | ||||
| Vmax | 0,01822 | м/с | ||||
| SH | 0,035174 | м | ||||
| t | fi | Sbi | riK | xk | yk | |
| S=18,22t | 0,029924 | 0,029924 | ||||
| 0,065556 | 0,058813 | 1,194422 | 0,031118 | 0,031065 | 0,001829 | |
| 0,131111 | 0,117625 | 2,388844 | 0,032313 | 0,03209 | 0,003792 | |
| 0,196667 | 0,176438 | 3,583267 | 0,033507 | 0,032987 | 0,005881 | |
| 0,262222 | 0,235251 | 4,777689 | 0,034702 | 0,033746 | 0,008089 | |
| 0,327778 | 0,294063 | 5,972111 | 0,035896 | 0,034355 | 0,010404 | |
| 0,393333 | 0,352876 | 7,166533 | 0,037091 | 0,034805 | 0,012818 | |
| 0,458889 | 0,411689 | 8,360956 | 0,038285 | 0,035086 | 0,01532 | |
| 0,524444 | 0,470502 | 9,555378 | 0,039479 | 0,03519 | 0,017897 | |
| 0,59 | 0,529314 | 10,7498 | 0,040674 | 0,035108 | 0,020538 | |
| 0,655556 | 0,588127 | 11,94422 | 0,041868 | 0,034834 | 0,023229 | |
| 0,721111 | 0,64694 | 13,13864 | 0,043063 | 0,034361 | 0,025956 | |
| 0,786667 | 0,705752 | 14,33307 | 0,044257 | 0,033685 | 0,028705 | |
| 0,852222 | 0,764565 | 15,52749 | 0,045452 | 0,032802 | 0,031463 | |
| 0,917778 | 0,823378 | 16,72191 | 0,046646 | 0,031707 | 0,034212 | |
| 0,983333 | 0,88219 | 17,91633 | 0,04784 | 0,030401 | 0,036939 | |
| 1,048889 | 0,941003 | 19,11076 | 0,049035 | 0,02888 | 0,039627 | |
| 1,114444 | 0,999816 | 20,30518 | 0,050229 | 0,027147 | 0,042261 | |
| 1,18 | 1,058629 | 21,4996 | 0,051424 | 0,025201 | 0,044825 | |
| S=21,5 | 1,244 | 1,116046 | 21,5 | 0,051424 | 0,022587 | 0,046198 |
| 1,308 | 1,173463 | 21,5 | 0,051424 | 0,019899 | 0,047418 | |
| 1,372 | 1,23088 | 21,5 | 0,051424 | 0,017145 | 0,048482 | |
| 1,436 | 1,288297 | 21,5 | 0,051424 | 0,014335 | 0,049386 | |
| 1,5 | 1,345714 | 21,5 | 0,051424 | 0,011477 | 0,050127 | |
| 1,564 | 1,403131 | 21,5 | 0,051424 | 0,008582 | 0,050703 | |
| 1,628 | 1,460549 | 21,5 | 0,051424 | 0,005658 | 0,051112 | |
| 1,692 | 1,517966 | 21,5 | 0,051424 | 0,002715 | 0,051352 | |
| 1,756 | 1,575383 | 21,5 | 0,051424 | -0,00024 | 0,051423 | |
| 1,82 | 1,6328 | 21,5 | 0,051424 | -0,00319 | 0,051325 | |
| 1,884 | 1,690217 | 21,5 | 0,051424 | -0,00613 | 0,051058 | |
| 1,948 | 1,747634 | 21,5 | 0,051424 | -0,00905 | 0,050622 | |
| 2,012 | 1,805051 | 21,5 | 0,051424 | -0,01194 | 0,050019 | |
| 2,076 | 1,862469 | 21,5 | 0,051424 | -0,01479 | 0,049252 | |
| 2,14 | 1,919886 | 21,5 | 0,051424 | -0,01759 | 0,048322 | |
| 2,204 | 1,977303 | 21,5 | 0,051424 | -0,02033 | 0,047233 | |
| 2,268 | 2,03472 | 21,5 | 0,051424 | -0,02301 | 0,045989 | |
| 2,332 | 2,092137 | 21,5 | 0,051424 | -0,02561 | 0,044592 | |
| 2,396 | 2,149554 | 21,5 | 0,051424 | -0,02813 | 0,043049 | |
| 2,46 | 2,206971 | 21,5 | 0,051424 | -0,03055 | 0,041364 | |
| 2,524 | 2,264389 | 21,5 | 0,051424 | -0,03288 | 0,039543 | |
| 2,588 | 2,321806 | 21,5 | 0,051424 | -0,03509 | 0,037591 | |
| 2,652 | 2,379223 | 21,5 | 0,051424 | -0,03719 | 0,035515 | |
| 2,716 | 2,43664 | 21,5 | 0,051424 | -0,03917 | 0,033323 | |
| 2,78 | 2,494057 | 21,5 | 0,051424 | -0,04101 | 0,03102 | |
| 2,844 | 2,551474 | 21,5 | 0,051424 | -0,04273 | 0,028615 | |
| 2,908 | 2,608891 | 21,5 | 0,051424 | -0,0443 | 0,026116 | |
| 2,972 | 2,666309 | 21,5 | 0,051424 | -0,04572 | 0,023531 | |
| 3,036 | 2,723726 | 21,5 | 0,051424 | -0,047 | 0,020868 | |
| 3,1 | 2,781143 | 21,5 | 0,051424 | -0,04812 | 0,018137 | |
| 3,232143 | 2,899694 | 19,93018 | 0,049854 | -0,0484 | 0,011942 | |
| 3,364286 | 3,018245 | 18,39336 | 0,048317 | -0,04795 | 0,005945 | |
| 3,496429 | 3,136796 | 16,85654 | 0,046781 | -0,04678 | 0,000224 | |
| 3,628571 | 3,255347 | 15,31971 | 0,045244 | -0,04495 | -0,00514 | |
| 3,760714 | 3,373898 | 13,78289 | 0,043707 | -0,04253 | -0,01006 | |
| 3,892857 | 3,492449 | 12,24607 | 0,04217 | -0,0396 | -0,01449 | |
| 4,025 | 3,611 | 10,70925 | 0,040633 | -0,03624 | -0,01838 | |
| 4,157143 | 3,729551 | 9,172429 | 0,039096 | -0,03253 | -0,02169 | |
| 4,289286 | 3,848102 | 7,635607 | 0,03756 | -0,02857 | -0,02438 | |
| 4,421429 | 3,966653 | 6,098786 | 0,036023 | -0,02444 | -0,02646 | |
| 4,553571 | 4,085204 | 4,561964 | 0,034486 | -0,02024 | -0,02792 | |
| 4,685714 | 4,203755 | 3,025143 | 0,032949 | -0,01605 | -0,02878 | |
| 4,817857 | 4,322306 | 1,488321 | 0,031412 | -0,01195 | -0,02905 | |
| 4,95 | 4,440857 | -0,0485 | 0,029876 | -0,00801 | -0,02878 | |
| S=0 | 5,155 | 4,624771 | 0,029924 | -0,00262 | -0,02981 | |
| 5,36 | 4,808686 | 0,029924 | 0,002877 | -0,02979 | ||
| 5,565 | 4,9926 | 0,029924 | 0,008276 | -0,02876 | ||
| 5,77 | 5,176514 | 0,029924 | 0,013395 | -0,02676 | ||
| 5,975 | 5,360429 | 0,029924 | 0,018063 | -0,02386 | ||
| 6,18 | 5,544343 | 0,029924 | 0,022121 | -0,02015 | ||
| 6,385 | 5,728257 | 0,029924 | 0,025434 | -0,01577 | ||
| 6,59 | 5,912171 | 0,029924 | 0,027888 | -0,01085 | ||
| 6,795 | 6,096086 | 0,029924 | 0,029402 | -0,00557 | ||
| 6,28 | 0,029924 | 0,029924 | -9,5E-05 |
Теоретический профиль кулачка
|
|
|
|
Дата добавления: 2015-07-02; Просмотров: 232; Нарушение авторских прав?; Мы поможем в написании вашей работы!