КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Приёмоиндикатора глобальной спутниковой РНС GPS 1 страница
|
|
|
|
ОБЩИЕ УКАЗАНИЯ
Перед лабораторными занятиями каждый студент должен изучить со-ответствующий раздел конспекта лекций по дисциплине “Интегрированные коммуникационно - навигационные системы”.
При выполнении лабораторной работы каждая бригада студентов проводит исследования на конкретной лабораторной установке. Работа считается законченной после предъявления преподавателю результатов исследований.
После проведения исследований студенты обязаны привести в порядок свои рабочие места.
Перед зачетом бригада студентов должна оформить отчет по лабора-торным работам и сдать его на проверку преподавателю.
ЛИТЕРАТУРА
Основная:
3. Радиотехнические системы./ Под ред. Ю. М. Казаринова. – М.: Академия, 2008.
4. GPS III plus. Owner’s Manual & Reference. – GARMIN International, 2001.
5. Худяков Г. И. Транспортные информационно-управляющие радио-электронные системы: Учеб. пособие. – СПб.: СЗТУ, 2008.
Дополнительная:
6. Соловьев Ю. А. Системы спутниковой навигации. – ЭКО-ТРЕНДЗ, 2000.
– 4 –
ЛАБОРАТОРНАЯ РАБОТА № 3
Исследование эксплуатационно-технических характеристик
1. ЦЕЛЬ РАБОТЫ
Изучение принципа действия среднеорбитальных глобальных спутни-ковых радионавигационных систем (СРНС) типа американской РНС GPS (Global Positioning Sistem) и исследование эксплуатационно-технических характеристик приёмоиндикатора (ПИ) спутниковых РНС как радионавига-ционного датчика местоположения (РДМП) подвижного объекта в интегри-рованных радиосистемах сухопутной навигации, диспетчерского управления движением и мониторинга наземного транспорта, а также для аэронавигации летательных аппаратов малой авиации. В результате проведения лаборатор-ной работы студент должен научиться пользоваться современной радио-навигационной аппаратурой.
2. ОСНОВНЫЕ СВЕДЕНИЯ
О СРЕДНЕОРБИТАЛЬНЫХ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ РНС
GPS («Navstar» – США), ГЛОНАСС (РФ), «Galileo» (EC)
Одним из основных элементов современных радиосистем оператив-ного дистанционного управления (РСДУ) движением (диспетчеризации) и мониторинга (дистанционного централизованного контроля состояния) на-земных транспортных средств (НТС) является радионавигационный датчик местоположения (РДМП) объекта. В качестве такового чаще всего исполь-зуются приёмоизмерители (ПИ) спутниковых РНС (американской СРНС “Navstar-GPS”, российской ГЛОНАСС, европейской “Galileo”). Для начала рассмотрим структуру и функционирование системы GPS.
Сеть опорных станций состоит из 24 рабочих НИСЗ и одного-двух-трех резервных. Рабочие НИСЗ располагаются равномерно в шести наклонных плоскостях, разнесенных на 60° друг относительно друга. Это дает почти в любой открытой точке земной поверхности почти в любое время суток не менее четырех видимых пользователем НИСЗ, необходимых для определе-ния трех координат объекта местоопределения в геоцентрической системе пространственных координат (рис.1).
КИК состоит из сети командно-измерительных пунктов и центра упра-вления системой. КИК поддерживает:
– положение НИСЗ на орбитах;
– единое время в системе, связанное со всемирным временем;
– формирование информации для пользователей о точном местоположении каждого НИСЗ на текущий час (эфемериды) и на несколько витков вперед (альманах созвездия НИСЗ);
– контроль работоспособности НИСЗ и замену неисправных НИСЗ резервными.
– 5 –
 |
Рис. 1. Космический сегмент СРНС ГЛОНАСС и «Galileo»
Радиосигналы правосторонней круговой поляризации системы GPS используют две несущие с частотами f1 = 1575,42 МГц и f2 = 1227,6 МГц. Фазы этих несущих подвергаются бинарной фазовой манипуляции (0°/180°) двумя псевдослучайными последовательностями. Одна из них представляет собой двоичный код с длительностью элементарных символов около 1 мкс и с периодом повторения 1000 мкс. Это – так называемый код грубой привязки
(C/A-code = Coarse Acquisition). Этот код – открытый и может быть исполь-зован всеми гражданскими пользователями. Поэтому он иначе называется стандартным средством местоопределения (SPS = Standard Positioning Service). В настоящее время С/А-код используется только на частоте f1 и обеспечивает плановую (в горизонтальной плоскости) точность местоопре-деления sr = 10 м, точность определения геодезической высоты sh = 14 м и точность привязки к системному времени st = 100 нс. Чтобы воспрепят-ствовать – при обострении международной обстановки – гражданским поль-зователям (и вероятному противнику) получать столь высокую абсолютную точность местоопределения по грубому коду, Министерство обороны США предусмотрело в системе GPS процедуру селективного доступа (SA = Selec-tive Availability): псевдослучайные медленные колебания системного време-ни и искажения эфемеридной информации, которые приводят к загрублению точности местоопределения по С/А-коду до требуемой для национальной безопасности величины sr = 50 м.
После достаточно быстрой, но грубой привязки по С/А-коду ПИ санк-ционированных пользователей могут перейти к поиску и привязке по сигна-лам точного кода (P-code или код PPS = Precise Positioning Service). Точный код фазовой манипуляции имеет длительность бинарной посылки 0,1 мкс и представляет собой псевдослучайную последовательность с периодом
– 6 –
2,35×1014 (266 дней). Каждый НИСЗ использует свой сегмент этой последова-тельности длительностью в 1 неделю (кодовое разделение сигналов НИСЗ), который периодически обновляется.
P-код используется на обеих частотах, что позволяет определенному кругу пользователей при абсолютном местоопределении устранить погреш-ности радиоопределения, вызванные ионосферной и тропосферной рефрак-цией радиосигналов, принимаемых в приземном пространстве. P-код явля-ется секретным; однако для дальнейшего его засекречивания и повышения помехозащищенности системы от имитационных помех вероятного против-ника P-код сворачивается (суммируется по модулю 2) со специальным W-кодом. Результирующая псевдослучайная последовательность называется Y-кодом.
Использование Р-кода позволяет получать абсолютное местоположение с плановой точностью sr = 5-7 м, определять высоту с точностью sh = 10 м, время системное st = 26 нс, всемирное время с точностью st = 100 нс и составляющие скорости объекта sv = 0,1 м/с.
Переход к привязке по фазе высокочастотного заполнения радио-сигналов РНС позволяет получать неоднозначное местоположение назем-ного объекта с точностью в несколько сантиметров.
К сожалению, использование сигналов спутниковых РНС в сухопутной навигации имеет два существенных недостатка, являющихся следствием малой длины волны радиосигнала (l0 = 20 см): слабая доступность радиосиг-
налов на сильно пересеченных, горных и урбанизированных территориях и существенные локальные искажения принимаемых радиосигналов вблизи металлических и железобетонных конструкций (многолучёвость трассы распространения).
Поскольку ОС спутниковой РНС непрерывно меняют свое местопо-ложение, то для радиоопределений пользователям РНС необходима опера-тивная информация о текущих координатах НИСЗ. Такая информация фор-мируется на КИК и передается пользователям каждым НИСЗ с помощью дополнительного кодирования излучаемых радиосигналов D-кодом Голда, имеющим длительность элементарной посылки 20 мс. Каждый НИСЗ перио-дически передает эфемериды (параметры траектории на час вперед) данного НИСЗ, частотно-временные поправки к шкале времени, альманах для всех НИСЗ системы, поправки на условия распространения радиосигналов, теле-метрическую информацию. Эта информация обновляется ежечасно (кроме альманаха НИСЗ, который обновляется ежемесячно).
Извлечение навигационной информации в ПИ пользователя произво-дится следующим образом. В ПИ вырабатывается опорный сигнал грубого кода с произвольным (в допустимых пределах) временным и доплеровским сдвигом. Затем с помощью опорного сигнала производится взаимнокорел-ляционная обработка принимаемого от данного НИСЗ радиосигнала.
– 7 –
Если сигнал с данными параметрами частотно-временного сдвига не обнаружен, то параметры опорного сигнала меняются на некоторую дис-кретную величину и т.д.
При обнаружении сигнала (окончание частотно-временного поиска) включается схема частотно-временного слежения за радиосигналом данного НИСЗ, которая оперативно компенсирует доплеровский сдвиг частоты несущей и отслеживает временное положение максимума взаимнокорре-ляционной функции принимаемого и опорного сигналов. Устройство поиска сигналов переходит к частотно-временному поиску радиосигнала следу-ющего НИСЗ и т.д.
Постоянная времени схем частотно-временного слежения зависит от динамических характеристик подвижного объекта. Так, экспериментальные исследования отечественных и зарубежных специалистов показали, что, для автотранспорта, оптимальное значение постоянной времени этих схем 4-5 с, для морского – около 15 с. Темп выдачи отсчетов РНП обычно состав-ляет 1 с.
Первоначальное радиоопределение производится в декартовой геоцен-трической системе (X, Y, Z) всемирных геодезических координат WGS 84, после чего координаты (X, Y, Z) преобразуются в любую выбранную пользо-вателем систему геодезических координат.
Межведомственный исполнительный совет по системе GPS (IGEB) в 1997-99 гг. разработал программу развития системы GPS на период 2000-2030 гг. в интересах как военных, так и гражданских пользователей.
Для военных пользователей в поддиапазонах L1 и L2 вводятся на 20 Дб более мощные, чем в PPS, высокоточные сигналы М-кода, которые имеют гауссовскую манипуляцию несущей с минимальным частотным сдвигом (GMSK). Это позволит снизить взаимное влияние сигналов PPS и SPS друг на друга и повысить точность местоопределения по высокоточным сигналам в стандартном режиме до sr = 3 м.
Для местоопределения гражданских НТС снимается режим SA и вводится сигнал SPS в поддиапазоне L2. Это позволит всем гражданским пользователям повысить точность местоопределения НТС в стандартном режиме до sr = 8,5 м.
Для гражданской авиации вводится широкополосный (ширина полосы 20 МГц) сигнал, аналогичный сигналу М-кода, в поддиапазоне L5 с частотой несущей 1176,45 МГц и мощностью на 6 Дб большей, чем сигналы SPS.
Первым шагом по выполнению этой программы явилось снятие в мае 2000 г. режима селективного доступа, что позволило гражданским пользо-вателям увеличить абсолютную плановую точность местоопределения по сигналам SPS на частоте L1 с sr = 50 м до sr = 11 м.
В связи с этим в 2000-2008 гг. модернизируется аппаратура КИК.
– 8 –
Дальнейший график модернизации GPS, связанный с графиком запуска модернизированных НИСЗ второго поколения (GPS II) и НИСЗ третьего поколения (GPS III), следующий:
- запуск НИСЗ GPS IIR (добавляются сигналы С/А-кода на L2 и М-кода на L1 и L2) – 2003-05 гг.;
- запуск НИСЗ GPS IIF (добавляются сигналы С/А-кода на L2, М-кода на L1 и L2 и широкополосный сигнал на L5) – 2005-10гг.;
- запуск НИСЗ GPS III (добавляются сигналы С/А-кода на L2, М-кода повышенной мощности на L1 и L2 и широкополосный сигнал на L5) – после 2010г.
Таким образом, после 2008 г. разработчики транспортных информаци-онно-управляющих систем (ТИУС) гражданского назначения получат в свое распоряжение радиосигналы GPS в трех поддиапазонах (L1, L2 и L5), что позволит увеличить точность и надежность координатного обеспечения ТИУС, а также уменьшить влияние на навигационное местоопределение сигналов РЭС соседних поддиапазонов частот (приаэродромных РЛС, военных радиосистем связи и управления JTIDS и др.). Кроме того, для малоподвижных гражданских объектов совместное использование радиосиг-налов L1 – L2, L1 – L5 и L2 – L5 позволит устранять многозначность прецизионного местоопределения по фазе несущей и обеспечить однозна-чное определение координат объектов с сантиметровой точностью по всему земному шару. Такая точность координатного обеспечения требуется при приземлении авиалайнеров, при топографических съемках, при автоматичес-ком управлении передвижением тихоходных наземных машин и механизмов (тракторов, комбайнов, грейдеров, экскаваторов, трейлеров и т.п.), в геофи-зических исследованиях и пр., а также всех подвижных объектов на территории аэропортов.
К сожалению, американцы предусмотрели другую “хитрость” – селек-тивный доступ по географическому признаку: в нужное время они по своему желанию смогут купировать локальные районы и территории земного шара, оставляя их без радионавигационного обеспечения вообще.
Российским аналогом системы GPS является система ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система), которая была введена в эксплуатацию в январе 1996 г. Основные отличия системы ГЛОНАСС от GPS заключаются в расположении НИСЗ в трех плоскостях (см. рис.1), в большей длительности элементарных посылок (точного кода – 0,2 мкс, грубого кода – 2 мкс), в частотном разделении сигналов различных НИСЗ и в отсутствии режима селективного доступа. Натурные испытания системы ГЛОНАСС в 1996-97 гг. показали плановую точность местоопределения по сигналам грубого кода sr =17-23 м.
– 9 –
К сожалению, известные политические события в России привели к тому, что в настоящее время космическая группировка ГЛОНАСС насчи-тывает менее десятка НИСЗ, что не позволяет использовать её для круглосуточного глобального местоопределения. В 2004 г. принято решение довести эту группировку до 18 НИСЗ в 2006 г. и до полного состава в 24 НИСЗ – в 2010 г.
В 1997-2000 гг. Евросоюзом была разработана и введена в эксплуа-тацию спутниковая радионавигационная система EGNOS, которая состоит из трех геостационарных спутников, обслуживающих транспортный комплекс Зап. Европы. Система EGNOS излучает навигационные радиосигналы, анало-гичные сигналам СРНС GPS, а также ретранслирует сигналы СРНС GPS (псевдоспутники GPS), передает информацию о целостности системы GPS и о дифференциальных поправках для пользователей СРНС GPS. В это же время был разработан технический проект европейской среднеорбитальной СРНС «Galileo», аналогичной СРНС GPS и ГЛОНАСС и сопряженной с системой EGNOS.
В системе «Galileo» будут использоваться четыре вида радиосигналов в поддиапазонах Е1, Е2, Е4 и Е5:
· OAS (Open Access Service) – для координатного обеспечения наземного, водного и воздушного транспорта общего пользования (длитель-ность элементарной посылки tэ = 0,33 мкс, точность местоопределения sr = 10-20 м);
· CAS (Controlled Access Service) – для платного высокоточного координатного обеспечения выделенных групп пользователей (длительность посылки tэ = 0,065 мкс, точность sr = 4 м), в том числе – воздушных судов при их инструментальной посадке по I категории ICAO;
· SAS (Safety Access Service) – для навигационного обслуживания частных служб обеспечения безопасности пассажирских перевозок,
· GAS (Government Access Service) – для навигационного обслу-живания государственных служб обеспечения безопасности, для обеспечения национальной безопасности стран Евросоюза и для стратегических целей Евросоюза в целом.
Кроме того, будет организована ретрансляция радиосигналов междуна-родной службы поиска и спасения терпящих бедствие на воде (Cospar-Sarsat) – служба SAR (Search and Rescue).
В будущем «Galileo» станет основным компонентом трансевропейской транспортной сети и ее инфраструктуры, обеспечивающей также и глобаль-ные перевозки.
Совет Министров транспорта Евросоюза в 1999 г. принял следующую стратегию развития СРНС «Galileo»:
2000 г. – разработка технического проекта системы;
– 10 –
2000-03 гг. – развертывание наземных служб системы и обеспечение эксплуатационной готовности космического сегмента системы;
2004–05 гг. – запуск экспериментальных НИСЗ и испытания работо-способности системы;
2005–08 гг. – запуск рабочих навигационных ИСЗ, обеспечение пол-ной эксплуатационной готовности системы и ввод ее в эксплуатацию.
Система «Galileo» создается под руководством Европейского косми-ческого агентства (ESA) в рамках проекта «GalileoSat», стоимость которого оценивается в 3 млрд. евро.
По оценкам западноевропейских специалистов, система «Galileo» позволит транспортникам Евросоюза получить дополнительную прибыль в 2005–25 гг. около 90 млрд. евро, сократить время перевозок на 30%, километраж – на 40%, снять стрессовое состояние водителей в 90% случаев.
 |
На рис.2 приведено распределение спектров радиосигналов спутни-ковых РНС GPS, ГЛОНАСС и “Galileo”.
Рис.2. Спектры радиосигналов спутниковых РНС
Аппаратура пользователей спутниковой РНС «Navstar» (GPS) претер-пела за последние 10 лет ряд коренных изменений, а свыше 100 радиоэлек-тронных фирм разработали около 500 моделей приёмоизмерителей. Если в 1993 г. приёмоизмерители (ПИ) для НТС (первого поколения) имели габа-риты объемом 1000–2500 куб.см при стоимости 2500–5000 дол. США, то в 1995 г. ПИ второго поколения имели объемы 500–1000 куб.см при стоимос-ти 1000–2000 дол., а в 1997 г. 200–400 куб. см при стоимости 200–500 дол. В это же время появились приёмоизмерительные модули, которые можно встраивать в бортовые персональные компьютеры и другую радиоэлек-тронную аппаратуру и которые имеют объемы 40-100 куб.см при стоимости 50–100 дол. Наконец, американская фирма «SiRF Technology» разработала приёмоизмерительную микросхему (чип) универсального применения «SiRF star I/LX» с размерами 9 × 1,6 × 9 мм при оптовой цене около 20 дол. Выпускаются и более миниатюрные микросхемы.
– 11 –
Ведущими производителями ПИ спутниковых РНС для наземного транспорта являются американские фирмы «Trimble Navigation», «Magellan Systems», «GARMIN International», канадская «Canadian Marconi», японская «Koden Electronics» и испанская «Sena GPS SA».
Основные эксплуатационно-технические характеристики типичного при-ёмоизмерителя GPS для непрофессионального использования на транспорт-ных средствах следующие:
- производитель – GARMIN Int. (США, шт. Канзас);
- модель – “GPS III plus”;
- появление на рынке – I кв. 1999 г.;
- назначение – непрофессиональная воздушная, сухопутная и мор-ская навигация;
- количество каналов – 12;
- размеры = объем – 51 × 156 × 31 мм = 247 куб. см;
- масса – 255 г;
- дифференциальная точность местоопределения – 1-5 м;
- темп выдачи данных – 1 с;
- «холодный» старт – 5 мин;
- «теплый» старт – 15 с;
- порт – RS-232C со скоростью 300-9600 бит/с;
- рабочие температуры – от –15° С до +70° С;
- энергопотребление – 0,75 Вт;
- стоимость – 572 дол. США.
Типичный выносной антенный блок с фидером длиной 5 м имеет размеры 52 × 42 × 14 мм и стоимость 20-60 дол.
– 12 –
3. ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ
 |
Лабораторная установка представляет собой серийный сухопутно-авиа-ционный приёмоиндикатор (ПИ) сетевой среднеорбитальной спутниковой РНС GPS модели “GPS III Plus” американской фирмы GARMIN с антенно-фидерным входным устройством и сетевым блоком электропитания (рис.3).
Рис.3. Структурная схема лабораторной установки
Антенно-фидерное устройство крепится присоской к оконному стеклу лаборатории. Приёмоиндикатор крепится специальной полоской Velcro к подставке, установленной на лабораторном столе.
4. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
4.1. Соберите лабораторную установку и предъявите её на проверку преподавателю.
 4.2. Включите блок питания, вставив вилку блока в розетку 220 В, 50 Гц.
4.2. Включите блок питания, вставив вилку блока в розетку 220 В, 50 Гц.
4.3. Нажмите и удерживайте 3-4 с красную кнопку Power () на лицевой стороне приёмоиндикатора (рис. 4). ПИ будет проводить внутреннее тестирование.
При прохождении приемником внутреннего тестирования на экране будет отображаться Страница Приглашения (Welcome Page). По завершении тестирования Страница Приглашения сменится Страницей Состояния Спут-ников (Satellite Status Page – рис. 5). Иногда появляется специальное сообщение о необходимости “выбрать способ инициализации” (select initiali-zation method). Если такое сообщение появилось автоматически, нажмите MENU, с помощью качающейся клавиши (в середине клавиатуры – Rocker Keypad) выделите “Initialize Position” и нажмите кнопку ENTER/mark.
Страницу Состояния Спутников Вы видите, пока приёмник вычисляет координаты. Если на экране другая страница, то нажимайте кнопку PAGE или QUIT до тех пор, пока не появится Страница Состояния Спутников. Эта страница предоставляет Вам информацию о состоянии системы, помогаю-щую понять, чтó делает приемник в данный момент времени.
– 13 –
К этой странице Вы будете периодически возвращаться, чтобы узнать, в каком режиме работает приёмник.
 |
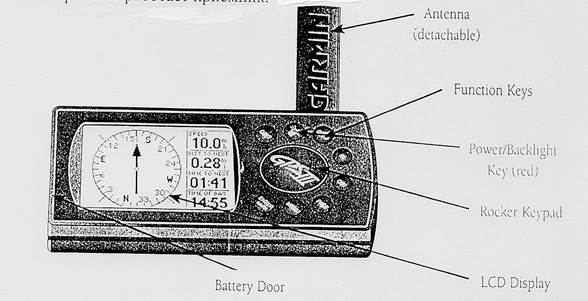
Рис.4. Общий вид приёмоиндикатора “GPS III Plus”:
 Rocker Keypad – качающаяся клавиша (“влево-вправо”, “вверх-вниз”)
Rocker Keypad – качающаяся клавиша (“влево-вправо”, “вверх-вниз”)
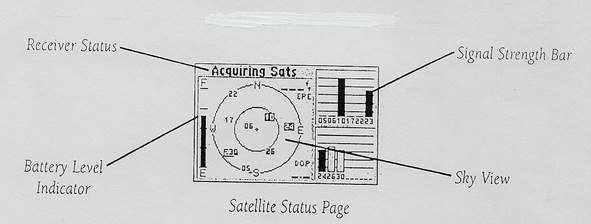
Рис.5. Страница Состояния Спутников (Satellite Status Page)
На странице показано положение доступных спутников на небесной сфере, соответствующие им столбики уровня сигнала (справа), текущий режим определения координат (поиск спутниковых сигналов, 2D – двумер-ное местоопределение, 3D – трёхмерное местоопределение и т. д.), значение геометрического фактора (DOP – Dilution of Position) и оценка плановой среднеквадратической погрешности местоопределения Вашего местополо-жения (EPE – Estimated Position Error). При работе от внутренних источников питания Вы также можете узнать, каков оставшийся заряд батарей (слева: F – full, E – empty), и, с помощью качающейся клавиши, отрегулировать контрастность экрана.
– 14 –
Спутники на плане небесной полусферы и в строках уровня сигнала обозначаются в соответствии с их номерами от 01 до 32. План небесной полусферы показывает, в какой точке небосвода искать каждый из спутников по его азимуту и углу места (угол над горизонтом). Столбики уровня сигнала показывают относительную силу сигналов ото всех спутников, от которых приняты сигналы. Чем выше столбик, тем сильнее сигнал.
Запишите номера спутников, по которым произведено местоопреде-ление 3D, их расположение на небесной сфере, значения плановой погрешности местоопределения и геометрического фактора.
В дальнейшем: для последовательного перехода со страницы на стра-ницу “вперёд” нажимайте (без удержания!) кнопку PAGE, “назад” – QUIT.
4.4. Нажимайте кнопку PAGE до появления Страницы Местоположе-ния (Position Page – рис.6). Если Вы “проскочили” эту страницу – нажимайте кнопку QUIT.
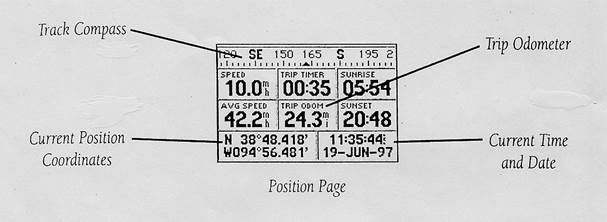
Рис.6. Страница Местоположения
(Trip Odometer – Счетчик пройденного пути)
Страница Местоположения показывает, где Вы находитесь, в каком направлении и с какой скоростью двигаетесь. Эта страница может оказаться удобной для использования, когда у Вас нет заранее выбранного пункта назначения.
Графический компас, отображаемый в верхней части страницы, пока-зывает Вам (в процессе движения) направление движения (курс), в то время как расположенные ниже шесть полей данных, определяемых пользовате-лем, показывают Вам текущую скорость, среднюю скорость, пройденное расстояние, время движения и времена восхода и захода Солнца для Вашего текущего местоположения. “Определяемые пользователем” означает, что Вы можете изменить отображаемую на этих полях навигационную информацию.
Под полями данных, определяемых пользователем, располагаются два дополнительных поля данных. В них отображаются Ваши текущие коорди-наты, а также текущее время и дата. Текущие координаты могут быть пред-ставлены в форматах: геодезические широта B и долгота L, плоские прямо-угольные координаты (x, y) Гаусса-Крюгера (UTM), координаты Ламберта (UPS), координаты Maidenhead, MGRS, временные задержки импульсно-
– 15 –
фазовой радионавигационной системы Loran-C (LoranTD) – или в формате одной из региональных систем координат. По умолчанию координаты B и L визуализируются в системе WGS 84. Текущие дата и время могут быть выражены в формате местного (поясного) времени либо в UTC (Всемирное Координированное Время).
Запишите полученные приёмоизмерителем координаты в выбранной Вами системе координат и время в выбранном Вами формате.
4.5. Нажатием кнопки PAGE перейдите на Страницу Карты (Map Page – рис.7).
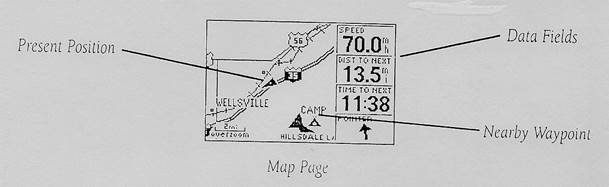
Рис.7. Страница Карты
Страница Карты показывает Ваше перемещение на фоне электронной карты в режиме реального времени посредством линии пройденного пути (электронная точечная линия, отображаемая на карте по мере Вашего продвижения), а также текущие координаты – пиктограммой самолёта (▲) в центре карты. Кроме того, на Странице Карты отображаются границы близ-лежащих воздушных зон, озера, реки, шоссе и города. Масштаб карты показан в нижнем левом углу. Для установки нужного Вам масштаба используйте кнопки масштабирования (IN и OUT).
Чтобы изменить масштаб карты:
1. Нажмите кнопку IN для выбора большего масштаба и более подробного представления меньшей территории.
2. Нажмите кнопку OUT для выбора меньшего масштаба для показа большей территории.
Карта может быть сориентирована так, чтобы её верхняя часть соответствовала направлению на Север или линии заданного пути (ЛЗП) либо карта может автоматически поворачиваться, сохраняя на экране текущее направление Вашего движения (линию пути), ориентированное вверх. Эта последняя опция называется “Track Up” и является установкой по умолчанию.
Близлежащие аэропорты, радиомаяки VOR и NDB, пересечения и пользовательские промежуточные путевые точки (ППТ – Waypoints: см. п.4.9) отображаются на карте (каждая своим специальным символом) с идентификатором над символом путевой точки.
– 16 –
4.6. Перейдите на Страницу Компаса (Compass Page – рис.8). Эта страница обеспечивает графическую проводку по направлению на точку назначения. Страница Компаса предоставляет Вам вращающееся “Кольцо компаса” (Compass Ring), верх которого показывает курс относительно земли (путевой угол) во время Вашего движения. Указательная стрелка показывает направление (азимут) на заданную точку по отношению к Вашему курсу относительно земли. Кольцо компаса и указательная стрелка работают неза-висимо друг от друга для того, чтобы наглядно показать направление Вашего движения и истинное направление на заданную точку. Например, если стрелка направлена строго вверх – Вы движетесь прямо на заданную путевую точку. В случае отклонения стрелки в ту или иную сторону от верха – просто измените направление Вашего движения (курс) так, чтобы стрелка пока-зывала строго вверх.
Текущая скорость и расстояние до места прибытия отображаются справа вверху. Справа внизу отображаются расчётное время прибытия к месту назначения и текущее время.
 |

Рис.8. Страница компаса
4.7. Инициализируйте Страницу Магистраль (Highway Page – рис.9).
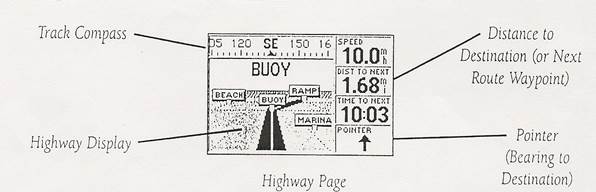
Рис.9. Страница Магистраль:
Track Compass – Путевой компас,
Pointer (Bearing to Destination) – Указатель (Азимут на точку назначения)
– 17 –
Страница Магистраль приёмника GPS III+ также обеспечивает графическую проводку на пункт назначения. Когда Вы движетесь на пункт назначения, середина экрана обеспечивает визуальную проводку на эту точку по подвижному графическому изображению “магистрали”. Точка в центре нижней кромки Страницы Магистраль соответствует Вашему текущему местоположению. Линия, идущая сверху вниз от середины, соответствует линии заданного пути (ЛЗП). При осуществлении навигации на заданную точку – “магистраль” будет двигаться, показывая Ваше отклонение от ЛЗП. Для того чтобы остаться на курсе, просто двигайтесь по осевой линии “магистрали”.
|
|
|
|
|
Дата добавления: 2015-07-02; Просмотров: 1157; Нарушение авторских прав?; Мы поможем в написании вашей работы!