КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Построение структурной схемы исходной системы
|
|
|
|
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
Техническое задание на проектирование включает в себя исходные данные, позволяющие произвести синтез САУ. К ним относятся сведения о принципе действия нескорректированной системы, ее функциональная схема, параметры всех звеньев САУ, показатели качества проектируемой системы.
Кроме того, могут быть предъявлены некоторые другие требования, которые вводятся для индивидуализации содержания КР. Варианты заданий распределяются и утверждаются кафедрой.
Задание 1. Синтез следящей системы
Исходная нескорректированная система представлена на рис. 2.1. Варианты задания приведены в табл. 2.1.
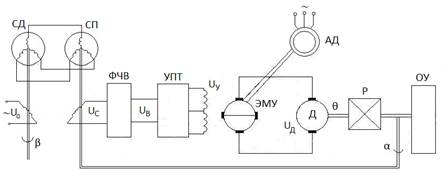
Рис. 2.1. Следящий электропривод на основе системы ЭМУ-Д
В функциональной схеме следящего электропривода обозначено: Д – электродвигатель постоянного тока независимого возбуждения, ЭМУ – электромашинный усилитель, СД – сельсин-датчик, СП – сельсин-приемник, ФЧВ – фазочувствительный выпрямитель, УПТ – усилитель постоянного тока, АД – асинхронный двигатель, Р – редуктор, ОУ – объект управления.
Задающим воздействием в этой схеме является угол поворота ротора сельсина-датчика β, регулируемой координатой − угол поворота выходного вала редуктора α, который измеряется сельсином-приемником. Пара СД и СП включены по трансформаторной схеме, которая позволяет формировать сигнал рассогласования (переменное напряжение UС), пропорциональный ошибке слежения  . Этот сигнал подается на ФЧВ, который выпрямляет напряжение UС с учетом его величины и фазы. Последняя определяется знаком δ, отсюда следует, что выходное напряжение фазо-чувствительного выпрямителя UВ имеет пропорциональную зависимость от ошибки δ.
. Этот сигнал подается на ФЧВ, который выпрямляет напряжение UС с учетом его величины и фазы. Последняя определяется знаком δ, отсюда следует, что выходное напряжение фазо-чувствительного выпрямителя UВ имеет пропорциональную зависимость от ошибки δ.
Постоянное напряжение UВ усиливается УПТ и подается в прямую и обратную обмотки управления ЭМУ в соответствие со знаком UВ. Электромашинный усилитель выполняет роль усилителя мощности. По существу – это двухкаскадный генератор постоянного напряжения, который приводится в движение от асинхронного двигателя. Последний питается от трехфазной сети и вращается с некоторой постоянной скоростью. Напряжение на выходе электромашинного усилителя UД пропорционально напряжению, подаваемому в обмотку управления UУ. Под действием напряжения UД двигатель вращается с определенной скоростью в прямом или обратном направлении в зависимости от знака UД.
Редуктор Р в следящих системах обычно существенно понижает обороты, т.е. его коэффициент передачи значительно меньше единицы. В данной системе объектом управления по существу является двигатель с редуктором, т.к. обратная связь организована по положению вала Р. Однако с учетом того, что ОУ жестко связан с валом Р можно считать, что объектом управления является система Д - ОУ. Работает САУ следующим образом. Если угол поворота  не изменяется, то α=β и δ= 0, все напряжения UС, UВ, UУ, UД равны нулю и двигатель не вращается. При повороте вала СД на некоторый угол в ту или иную сторону возникнет рассогласование , появятся соответствующие напряжения, включая напряжение на двигате-
не изменяется, то α=β и δ= 0, все напряжения UС, UВ, UУ, UД равны нулю и двигатель не вращается. При повороте вала СД на некоторый угол в ту или иную сторону возникнет рассогласование , появятся соответствующие напряжения, включая напряжение на двигате-
Таблица 2.1
| Наименование данных | Варианты | |||||||||
| Постоянная вре-мени поперечной цепи ЭМУ, ТК, с | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.65 | 0.55 | 0.45 | 0.35 | 0.25 |
| Постоянная време-ни якорной цепи ЭМУ и Д, ТЭ, с | 0.05 | 0.08 | 0.05 | 0.08 | 0.03 | 0.06 | 0.09 | 0.1 | 0.15 | 0.1 |
| Электромеханичес-кая постоянная времени Д, ТМ, с | 0.02 | 0.25 | 0.15 | 0.3 | 0.2 | 0.3 | 0.25 | 0.15 | 0.18 | 0.15 |
| Постоянная време-ни обмотки управ-ления ЭМУ, ТУ, с | 0.006 | 0.005 | 0.007 | 0.006 | 0.005 | 0.007 | 0.006 | 0.005 | 0.007 | 0.006 |
| Коэффициент пе-редачи сельсинов KC, в/рад | ||||||||||
| Коэффициент пе-редачи УПТ, KУ | ||||||||||
| Коэффициент пе-редачи ЭМУ, KЭ | ||||||||||
| Коэффициент пере-дачи Д, KД, рад/с/в | 1.5 | 2.5 | 1.5 | |||||||
| Коэффициент пе-редачи Р, KР | 0.05 | 0.025 | 0.1 | 0.012 | 0.08 | 0.008 | 0.01 | 0.01 | 0.01 | 0.01 |
| Коэффициент пе-редачи ФЧВ, KВ | 0.7 | 0.8 | 0.9 | 0.95 | 0.85 | 0.75 | 0.8 | 0.9 | 0.75 | 0.85 |
| Максимальная ско-рость Ωм, град/с | ||||||||||
| Максимальное ус-корение εм, град/с2 | ||||||||||
| Максимальная ошибка eд, угл.мин | ||||||||||
| Перерегулирование σ, % | ||||||||||
Время переходно-го процесса  , с , с
| 0.8 | 0.8 | 0.4 | 0.4 | 0.7 | 0.7 | 0.6 | 0.5 | 0.4 | 0.25 |
ле Д. Последний начнет вращаться вместе с Р и СП в том же направлении, что и СД. Как только выполнится равенство α=β двигатель Д и редуктор Р остановятся. Если угол β изменять постоянно, то он будет отслеживаться системой с определенной ошибкой δ. Очевидно, чем выше скорость и ускорение входного вала β, тем больше ошибка слежения.
Задание 2. Синтез следящей системы
Исходная нескорректированная система представлена на рис. 2.2. Варианты задания приведены в табл. 2.2.
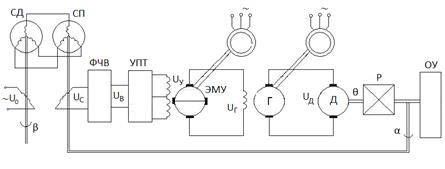
Рис. 2.2. Следящий электропривод на основе системы ЭМУ-Г-Д
Данная САУ отличается от следящей системы, приведенной рис. 2.1, наличием в канале управления генератора постоянного напряжения Г со своим приводным двигателем. Совместно с ЭМУ он выполняет роль усилителя мощности. Работает эта система так же, как и следящий электропривод, построенный на основе системы ЭМУ-Д.
Таблица 2.2
| Наименование данных | Варианты | |||||||||
| Постоянная вре-мени поперечной цепи ЭМУ, ТК, с | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.65 | 0.55 | 0.45 | 0.35 | 0.25 |
| Постоянная време-ни якорной цепи Г и Д, ТЭ, с | 0.05 | 0.05 | 0.05 | 0.06 | 0.06 | 0.06 | 0.03 | 0.03 | 0.04 | 0.05 |
| Постоянная време-ни обмотки воз-буждения Г, ТГ, с | 0.25 | 0.3 | 0.35 | 0.35 | 0.3 | 0.25 | 0.2 | 0.2 | 0.2 | 0.12 |
| Электромеханичес-кая постоянная времени Д, ТМ, с | 0.4 | 0.5 | 0.6 | 0.4 | 0.5 | 0.6 | 0.5 | 0.3 | 0.4 | 0.4 |
| Постоянная време-ни обмотки управ-ления ЭМУ, ТУ, с | 0.006 | 0.005 | 0.007 | 0.006 | 0.005 | 0.007 | 0.006 | 0.005 | 0.007 | 0.006 |
| Коэффициент пере-дачи сельсинов KC, в/рад | ||||||||||
| Коэффициент пере-дачи УПТ, KУ | ||||||||||
| Коэффициент пере-дачи ЭМУ, KЭ | ||||||||||
| Коэффициент пере-дачи Д, KД, рад/с/В | 1.5 | 1.5 | 1.2 | 1.2 | ||||||
| Коэффициент пере-дачи Р, KР | 0.05 | 0.025 | 0.1 | 0.012 | 0.08 | 0.008 | 0.01 | 0.01 | 0.01 | 0.01 |
| Коэффициент пере-дачи ФЧВ, KВ | 0.7 | 0.9 | 0.8 | 0.75 | 0.85 | 0.95 | 0.7 | 0.8 | 0.95 | 0.85 |
| Коэффициент передачи Г, KГ | 1.5 | 1.5 | 1.5 | 1.5 | ||||||
| Максимальная ско-рость Ωм, град/с | ||||||||||
| Максимальное ус-корение εм, град/с2 | ||||||||||
| Максимальная ошибка eд, угл.мин | ||||||||||
| Перерегулирова- ние σ, % | ||||||||||
| Время переходно-
го процесса , с
| 0.2 | 0.5 | 0.25 | 0.2 | 0.15 | 0.15 | 0.5 | 0.2 | 0.3 | 0.5 |
Задание 3. Синтез следящей системы
Исходная нескорректированная система приведена на рис. 2.3, варианты задания − в табл. 2.3.
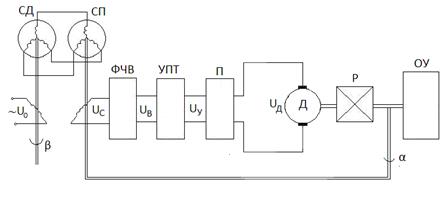
Рис. 2.3. Следящий электропривод на основе системы П-Д
Эта САУ по принципу действия не отличается от схемы, приведенной на рис. 2.1. Преобразователь П реально представляет собой тиристорный преобразователь, который выполняет функции усилителя мощности.
Таблица 2.3
| Наименование данных | Варианты | ||||||||||
| Электромагнитная постоянная време-ни якорной цепи Д, ТЭ, с | 0.08 | 0.1 | 0.06 | 0.09 | 0.1 | 0.05 | 0.08 | 0.05 | 0.12 | 0.1 | |
| Электромеханичес-кая постоянная времени Д, ТМ, с | 0.35 | 0.56 | 0.48 | 0.6 | 0.45 | 0.5 | 0.2 | 0.25 | 0.32 | 0.26 | |
| Постоянная времени П, ТП, с | 0.003 | 0.004 | 0.005 | 0.006 | 0.007 | 0.008 | 0.007 | 0.004 | 0.005 | 0.006 | |
| Коэффициент пе-редачи сельсинов KC, в/рад | |||||||||||
| Коэффициент пе-редачи УПТ, KУ | |||||||||||
| Коэффициент пе-редачи Д, KД, рад/с/В | 1.5 | 1.5 | 1.2 | 1.5 | 0.8 | ||||||
| Коэффициент пе-редачи Р, KР | 0.05 | 0.025 | 0.1 | 0.012 | 0.08 | 0.008 | 0.01 | 0.01 | 0.01 | 0.012 | |
| Коэффициент пе-редачи ФЧВ, KВ | 0.8 | 0.7 | 0.9 | 0.85 | 0.95 | 0.75 | 0.7 | 0.9 | 0.85 | 0.85 | |
| Коэффициент передачи П, KП | |||||||||||
| Максимальная ско-рость Ωм, град/с | |||||||||||
| Максимальное ус-корение εм, град/с2 | |||||||||||
| Максимальная ошибка eд, угл.мин | |||||||||||
| Перерегулирова- ние σ, % | |||||||||||
| Время переходно-го процесса , с
| 0.2 | 0.4 | 0.4 | 0.25 | 0.5 | 0.25 | 0.4 | 0.2 | 0.25 | 0.35 | |
- ЦЕЛЬ, СОДЕРЖАНИЕ И ОБЪЕМ КУРСОВОЙ РАБОТЫ
Выполнение курсовой работы является заключительным этапом обучения студентов по дисциплине «Теория автоматического управления» и имеет своей целью систематизацию, закрепление и расширение теоретических знаний и практических навыков самостоятельной работы с технической литературой и приобретение творческих навыков при решении технических задач.
Анализ исходных данных на проектирование и предлагаемых во Введении подходов синтеза САУ позволяет выделить следующие основные этапы проектирования:
Ø Построение структурной схемы нескорректированной системы и определение передаточных функций ее звеньев.
Ø Определение показателей качества исходной системы, в том числе, оценка точности, запаса устойчивости и быстродействия.
Ø Синтез внутренних контуров САУ методом последовательной коррекции с подчиненным регулированием координат.
Ø Синтез основного контура регулирования с использованием логарифмических частотных характеристик. На этом этапе обычно решаются три задачи:
- построение желаемой логарифмической амплитудно-частотной характеристики;
- оценка точности и динамических показателей качества желаемой системы;
- определение передаточной функции (ПФ) последовательного корректирующего устройства (фильтра).
Ø Реализация корректирующих устройств (регуляторов) всех контуров САУ в виде активных и пассивных фильтров.
Ø Оценка качества скорректированной системы.
Ø Построение функциональной схемы скорректированной системы.
Курсовая работа состоит из расчетно-пояснительной записки (РПЗ) объемом 23-25 листов формата А4 (с иллюстрациями). РПЗ должна содержать обоснование принятых решений, соответствующие расчеты на всех этапах проектирования, заключение по результатам проделанной работы, в том числе о соответствии полученных показателей качества САУ техническому заданию.
Структурная схема САУ строится на основе её функциональной схемы с учетом принципа действия входящих в состав следящей системы узлов и блоков, а также исходных данных на проектирование. Например, для САУ, приведенной на рис. 2.2, можно предложить структурную схему, которая представлена на рис. 4.1.
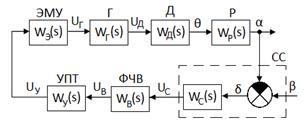
Рис. 4.1. Структурная схема следящей системы
Здесь СС – схема сравнения, реализующая операцию
δ = β - α; WС(s) – ПФ преобразования ошибки δ в напряжение UC; WВ(s) – ПФ фазочувствительного выпрямителя ФЧВ; WУ(s) – ПФ усилителя постоянного тока УПТ; WЭ(s) – ПФ электромашинного усилителя ЭМУ; WГ(s) – ПФ генератора Г; WД(s) – передаточная функция электродвигателя Д; WР(s) – ПФ редуктора Р.
Как показывает практика, наибольшую трудность при построении этой структурной схемы представляет замена функционального преобразования, выполняемого сельсинной парой (СД и СП) по соотношению UС = WС(s)δ =WС(s)∙(β-α), структурой, помеченной на рис. 4.1 пунктирной рамкой, т.к. рассогласование δ измеряется косвенно.
Кроме этого следует обратить внимание на отсутствие в структурной схеме возмущающих воздействий, которые возникают, в частности, от нестабильности питающего напряжения, влияющего на скорость вращения приводных двигателей, от изменения момента сопротивления на валу двигателя Д за счет колебания нагрузки на валу Р со стороны объекта управления. Дело в том, что согласно заданию на проектирование эти возмущения не оговорены, поэтому их можно опустить.
|
|
|
|
|
Дата добавления: 2015-06-27; Просмотров: 571; Нарушение авторских прав?; Мы поможем в написании вашей работы!