КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Графический метод решения ЗЛП
|
|
|
|
Наиболее простым и наглядным методом ЛП является графический метод. Он позволяет решать задачи ЛП в стандартной и неканонической формах, в которых не более двух переменных, и многими переменными в канонической форме при условии, что они содержат не более двух свободных переменных.
Решим нашу задачу графическим способом. Допустимые планы задачи располагаются в первом квадранте, т.к. х1³ 0, х 2 ³ 0.
Неравенство  определяет полуплоскость, которая содержит точку (0; 0).
определяет полуплоскость, которая содержит точку (0; 0).
Отметим стрелками на чертеже выбранную полуплоскость. Аналогичным образом находим полуплоскость, заданную неравенством

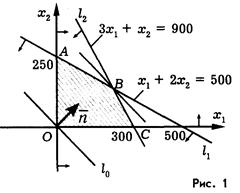
Прямая (l 2) Зх1 + х2 = 900 — граница этой полуплоскости — пересекает координатные оси в точках (300; 0) и (0; 900). Областью допустимых планов будет четырехугольник ОАВС.
 Изучим поведение функции цели L(x)=2х1 + х 2, для которой мы хотим найти точку максимума.
Изучим поведение функции цели L(x)=2х1 + х 2, для которой мы хотим найти точку максимума.
Строим вектор  , координаты которого есть коэффициенты целевой функции, и который называется градиентом. Он показывает направление наискорейшего изменения целевой функции. Для всех точек какой-либо прямой, перпендикулярной вектору , целевая функция имеет одно и тоже значение. Такие прямые называют линиями уровня целевой функции. Все они параллельны друг другу и перпендикулярны вектору .Перемещая параллельно самой себе линию уровня в направлении вектора , можно найти точку минимума и точку максимума целевой функции. Точкой минимума будет та из точек ОДР, в которой перемещаемая линия уровня впервые встретилась с областью допустимых решений, а точкой максимума — та, в которой линия уровня полностью вышла из области.
, координаты которого есть коэффициенты целевой функции, и который называется градиентом. Он показывает направление наискорейшего изменения целевой функции. Для всех точек какой-либо прямой, перпендикулярной вектору , целевая функция имеет одно и тоже значение. Такие прямые называют линиями уровня целевой функции. Все они параллельны друг другу и перпендикулярны вектору .Перемещая параллельно самой себе линию уровня в направлении вектора , можно найти точку минимума и точку максимума целевой функции. Точкой минимума будет та из точек ОДР, в которой перемещаемая линия уровня впервые встретилась с областью допустимых решений, а точкой максимума — та, в которой линия уровня полностью вышла из области.
Изобразим на рисунке 1 линию уровня нашей целевой функции. Прямая (L) 2х 1 + х 2 = 0 проходит через начало координат и перпендикулярна вектору . Из рисунка видно, что точкой максимума будет точка В — точка пересечения прямых /1 и 1 2.
Для нахождения координат точки В составляем систему уравнений, в которую входят уравнения прямых /1 и 1 2:

Зх1 + х2 = 900
Решением этой системы будет пара чисел: х1 = 260, х 2 = 120.
Итак, найден оптимальный план х = (260; 120). В этой точке целевая функция имеет значение L(x)= 2*260 + 120 = 640.
Смысл найденного ответа такой. Наибольшей будет общая масса рыб при условии, если в озере будет 260 рыб вида А и 120 рыб вида В и равна эта масса 640 кг.
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 698; Нарушение авторских прав?; Мы поможем в написании вашей работы!