КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 8. Краткое содержание: Сферическое движение тела
|
|
|
|
Краткое содержание: Сферическое движение тела. Уравнения движения-углы Эйлера. Теорема Эйлера-Даламбера. Мгновенная ось вращения, угловые скорость и ускорение тела. Скорость и ускорение точки тела.Свободное движение тела. Уравнения движения тела. Скорость и ускорение точки тела.
Движение твердого тела, при котором одна его точка остается неподвижной, называется сферическим движением.
Такое движение совершают, например, волчок, у которого неподвижна точка его опоры, и любое другое тело, закрепленное в какой-либо точке шаровым шарниром.
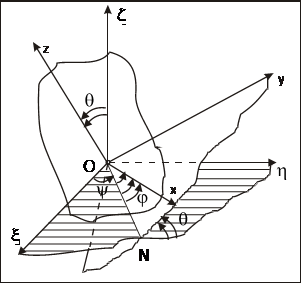 Введем две декартовы системы координат: неподвижную
Введем две декартовы системы координат: неподвижную  и подвижную Охуz с началом в неподвижной точке О.Подвижная система координат Охуz неизменно связана с телом. Плоскость Оху пересекает плоскость
и подвижную Охуz с началом в неподвижной точке О.Подвижная система координат Охуz неизменно связана с телом. Плоскость Оху пересекает плоскость  по линии ОN, называемой линией узлов.
по линии ОN, называемой линией узлов.
Положение подвижной системы координат относительно неподвижной определяет положение тело в соответствующий момент времени.
Это положение определяется тремя углами:  , которые называются углами Эйлера.
, которые называются углами Эйлера.
Угол y, называемый углом прецессии, определяет положение линии узлов ОN относительно неподвижной координатной оси  . Его изменение характеризует вращение тела с угловой скоростью
. Его изменение характеризует вращение тела с угловой скоростью  относительно неподвижной координатной оси
относительно неподвижной координатной оси  , называемой осью прецессии. Угол q, называемый углом нутации, определяет положение подвижной плоскости Оху относительно неподвижной плоскости
, называемой осью прецессии. Угол q, называемый углом нутации, определяет положение подвижной плоскости Оху относительно неподвижной плоскости  (положение подвижной оси Оz относительно неподвижной оси Оz). Его изменение характеризует вращение с угловой скоростью
(положение подвижной оси Оz относительно неподвижной оси Оz). Его изменение характеризует вращение с угловой скоростью  относительно линии узлов ОN. Угол j, называемый углом собственного вращения, определяет положение подвижной координатной оси Ох относительно линии узлов ОN. Его изменение характеризует вращение тела с угловой скоростью
относительно линии узлов ОN. Угол j, называемый углом собственного вращения, определяет положение подвижной координатной оси Ох относительно линии узлов ОN. Его изменение характеризует вращение тела с угловой скоростью  относительно подвижной координатной оси Оz, называемой осью собственного вращения.
относительно подвижной координатной оси Оz, называемой осью собственного вращения.
Таким образом, с помощью трех независимых друг от друга углов Эйлера, которые являются функциями времени и обобщенными координатами, определяется положение подвижной системы координат относительно неподвижной, а, следовательно, и положение тела в любой момент времени.
y=y(t), q=q(t), j=j(t). (*)
Эти функции, являющиеся уравнениями движения тела, должны быть однозначными, непрерывными и дважды дифференцируемыми функциями.
Теорема Эйлера-Даламбера: Перемещение тела, имеющего одну неподвижную точку, из одного положения в другое можно осуществить одним поворотом вокруг оси, проходящей через эту точку и называемую осью конечного поворота.
Траектории точек, принадлежащих телу, имеющему одну неподвижную точку, лежат на концентрических сферах, центр которых совпадает с неподвижной точкой О, а радиус равен расстоянию от точек до неподвижной точки О (отсюда название – сферическое движение).
Положение тела, имеющего неподвижную точку, относительно некоторой системы отсчета можно полностью определить положением сферической фигуры, получающейся в сечении тело одной из вышеназванных сфер.
Положение на этой сфере сферической фигуры полностью определяется заданием на этой сферической фигуре двух точек или дуги большого круга, проходящей через эти точки. Поэтому доказательство теоремы Эйлера-Даламбера повторяет метод доказательства теоремы 2 о перемещении плоской фигуры с той лишь разницей, что доказательство ведется не на плоскости с прямолинейным отрезком, а на сфере с дугой большого круга.
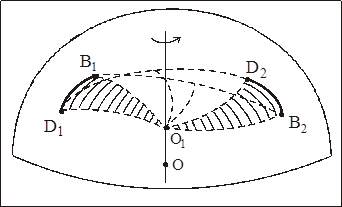 Доказательство: Пусть дуги большого круга
Доказательство: Пусть дуги большого круга  и
и  определяют положение дуги
определяют положение дуги  на сферическом сечении тело в моменты времени t1 и t2 соответственно.
на сферическом сечении тело в моменты времени t1 и t2 соответственно.
Соединив точки B1 и D1 соответственно с точками В2 и D2 дугами большого круга, восстановим в серединах дуг  и
и  сферические перпендикуляры, касательные к которым перпендикулярны соответственно касательным, проведенным в серединах дуг и . Эти сферические перпендикуляры пересекутся в точке O1 сферы. Ось ОO1 – неподвижная ось вращения. Так как =, а также равны сферические наклонные равноудаленные от сферических перпендикуляров:
сферические перпендикуляры, касательные к которым перпендикулярны соответственно касательным, проведенным в серединах дуг и . Эти сферические перпендикуляры пересекутся в точке O1 сферы. Ось ОO1 – неподвижная ось вращения. Так как =, а также равны сферические наклонные равноудаленные от сферических перпендикуляров: 
 то сферический треугольник O1B1D1 равен сферическому треугольнику O1B2D2. Следовательно, сферический угол B1O1D1 равен сферическому углу B2O1D2. После поворота сферического треугольника O1B1D1 вокруг оси ОO1 на сферический угол D1O1D2 дуга большого круга совпадет с дугой большого круга , так как сферические углы D1O1D2 и В1O1В2 равны:
то сферический треугольник O1B1D1 равен сферическому треугольнику O1B2D2. Следовательно, сферический угол B1O1D1 равен сферическому углу B2O1D2. После поворота сферического треугольника O1B1D1 вокруг оси ОO1 на сферический угол D1O1D2 дуга большого круга совпадет с дугой большого круга , так как сферические углы D1O1D2 и В1O1В2 равны:
Таким образом, перемещение дуги большого круга (следовательно, и тело) из положения в положение осуществлено одним поворотом вокруг оси, проходящей через неподвижную точку О.
|
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 571; Нарушение авторских прав?; Мы поможем в написании вашей работы!