КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Динамическая неуравновешенность (полная)
|
|
|
|
При динамической неуравновешенности главная центральная ось инерции пересекает ось вращения не в центре масс ротора, либо перекрещивается с ней; и главный вектор дисбалансов, и главный момент дисбалансов не равны нулю, т.е. необходимо уравновесить и вектор, и момент дисбалансов.
 , и
, и 
Для этого достаточно разместить на роторе две корректирующих массы. Массы выбираются и размещаются так, чтобы момент их дисбалансов был по величине равен, а по направлению противоположен моменту дисбалансов ротора, а векторная сумма дисбалансов была равна и противоположно направлена вектору. B этих зависимостях радиусам и расстояниями между корректирующими плоскостями задаются по условиям удобства размещения противовесов на роторе, а корректирующие массы рассчитывают.
На практике сначала уравновешивают момент от дисбаланса относительно первой корректирующей плоскости и подсчитывают необходимый дисбаланс корректирующего груза на второй:  ,
,  .
.
А затем дисбаланс уравновешивают корректирующим грузом во второй корректирующей плоскости:  ,
,  .
.
Условие динамической уравновешенности ротора: 
Такую задачу можно решать в том случае, когда расположение дисбалансов в роторе известно. При этом необходимо учесть, что при больших угловых скоростях колебания ротора практически не заметны.
Уравновешивание роторов при проектировании
1. Статическое уравновешивание при проектировании.
При проектировании статически уравновешивают детали, имеющие небольшие осевые размеры и конструктивно неуравновешенные. Такая балансировка может быть применена для роторов имеющих малые размеры по оси вращения – маховики, зубчатые колеса, шкивы и пр.
2. Динамическое уравновешивание при проектировании .
Динамическое уравновешивание при проектировании проводят с деталями и узлами, в которых массы распределены относительно оси вращения неравномерно, например, детали типа коленчатого вала.
На детали выбирают две плоскости коррекции, и каждый вектор дисбаланса раскладывают на две составляющие, расположенные в плоскостях коррекции. Затем составляющие векторы дисбалансов в плоскостях коррекции суммируются, и их равнодействующий дисбаланс уравновешивается соответствующей корректирующей массой.
Порядок балансировки на балансировочном оборудовании. Станок Шитикова
Если расположение дисбаланса для ротора известно, то применяется методика указанная выше. Обычно в реальных условиях расположение дисбаланса величина неизвестная и прежде чем его уравновесить, необходимо выяснит его величину и расположение. Эта задача решается на балансировочном оборудовании или балансировочных станках. Принцип работы с балансировочным оборудованием изучим на примере станка Шитикова.
Вообще говоря, известно, что амплитуда колебаний прямо пропорциональна дисбалансу их вызывающему. Причем коэффициент пропорциональности зависит только от свойств прибора (индикатора) которым эта амплитуда замеряется.
Поэтому порядок балансировки следующий:
1. Производится пуск ротора и при помощи индикатора снимается амплитуда собственных колебаний ротора.  .
.
2. Так как коэффициент пропорциональности на данном этапе не известен, то фиксируется любое положение корректирующей плоскости и считается нулевым. В этой плоскости выставляется корректирующий дисбаланс, величиной которого предварительно задается инженер. Измеряется амплитуда колебаний станка вместе с корректирующим грузом.  , где
, где  .
.
3. Корректирующая плоскость поворачивается на 180 градусов и проводится измерение третьей амплитуды – собственных колебаний станка за вычетом амплитуды, вызываемой введенным в систему дисбалансом корректирующей массы.  , где
, где  .
.
4. Для устранения погрешностей измерения, каждую амплитуду измеряют несколько раз и рассчитывают среднее арифметическое полученных значений.
5. Затем строят полученные векторные равенства. Из сложения и вычитания векторов известно, что суммой является большая диагональ параллелограмма построенного на складываемых векторах, как на сторонах, а разностью меньшая. Кроме того, из курса геометрии известно, что диагонали параллелограмма пересекаются и точкой пересечения делятся пополам, вследствие чего, задавшись масштабом построения, можно получить амплитуду колебаний только от корректирующей массы.
6. Так как дисбалансом корректирующего груза задавались при проведении балансировки, то, используя его можно определить коэффициент пропорциональности данного индикатора. Кроме того, по построенному параллелограмму можно определить 4 угла возможного расположения дисбаланса.
7. Далее выставляют противовес, назначая либо массу, либо радиус, в зависимости от условий балансировки и проводят контрольные замеры амплитуды колебаний станка на всех 4-х углах, определяя величину остаточного дисбаланса.
8. При необходимости ротор переворачивают на 180 градусов и проводя балансировку во второй корректирующей плоскости.
Статическое уравновешивание рычажных механизмов
Целью такого уравновешивания является устранение переменных воздействий на фундамент механизма. Вообще, как говорилось ранее, уравновешенным считается то механизм, у которого главный вектор и главный момент сил инерции равны нулю, но на практике довольно часто ограничиваются только статическим уравновешиванием, т.е.  .
.
Практика показывает, что влияние вращения на инерционность механизма, как правило, чрезвычайно мала.
, т.к.  , то необходимо, чтобы
, то необходимо, чтобы  . Это условие можно выполнить, если скорость центра масс механизма равна нулю, или она постоянна по величине и направлению. Обеспечить выполнение условие постоянства скорости движения центра масс в механизме практически невозможно. Поэтому при статическом уравновешивании обеспечивают выполнение первого условия. Это возможно, когда центр масс механизма лежит на оси вращения звена -
. Это условие можно выполнить, если скорость центра масс механизма равна нулю, или она постоянна по величине и направлению. Обеспечить выполнение условие постоянства скорости движения центра масс в механизме практически невозможно. Поэтому при статическом уравновешивании обеспечивают выполнение первого условия. Это возможно, когда центр масс механизма лежит на оси вращения звена -  ,или когда он неподвижен
,или когда он неподвижен  .
.
Из теоретической механики известно, что 
На практике наиболее часто статическое уравновешивание проводят:
- выбирая симметричные схемы механизма;
- устанавливая на звеньях механизма противовесы (или корректирующие массы);
- размещая противовесы на дополнительных звеньях или кинематических цепях.
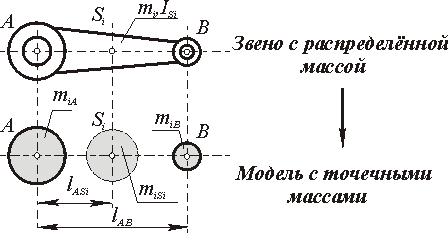
Метод замещающих масс.
При использовании метода замещающих масс, звено механизма с распределенной массой заменяется расчетной моделью, которая состоит из точечных масс.
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 1082; Нарушение авторских прав?; Мы поможем в написании вашей работы!