КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Методы настройки параметров
|
|
|
|
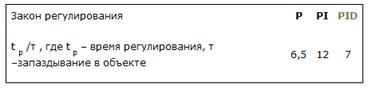
Время регулирования для различных типов регуляторов
Минимально возможное время регулирования для различных типов регуляторов при оптимальной их настройке определяется таблицей 2.
Таблица 2
Основная сложность состоит в подборе необходимых параметров. Если изменеие коэффициентов процесса известно заранее, то применяются таблицы управления коэффициентами процесса.
Разные методы используются для настройки параметров.
1. Метод Ziegler-Nichols (Циглера Никольса) - Настройка по процессу двухпозиционного регулирования по релейному закону:
а) Cистема переводится в режим двухпозиционного регулирования по релейному закону (см. рис. 4);
определяется амплитуда - А и период колебаний tс;
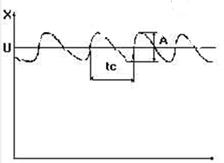
Рис. 4 Метод настройки по релейному закону
в) вычисляются коэффициенты настройки согласно следующим примерным соотношениям:
для P -регулятора К = 0.45*А
для PD -регулятора К = 0.45*А, TD=0.05·tc
для PI -регулятора К = 0.4*А, TI = 0.8·tc
для PID -регулятора К = 0.55*А, TI = 0.5·tс, TD=0.12·tc.
Если объект не меняет структуру и свои параметры, то системы с PI D-регуляторами обеспечивают необходимое качество регулирования при больших внешних возмущающих воздействиях и помехах, то есть близкое к 0 рассогласование. Как правило, точно согласовать параметры регулятора и объекта сразу не удается.
Если TI меньше оптимального в два раза, процесс регулирования может перейти в колебательный режим. Если TI существенно больше оптимального, то регулятор медленно выходит на новый режим и слабо реагирует на быстрые возмущения. Таким образом, как правило необходима дополнительная подстройка.
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 508; Нарушение авторских прав?; Мы поможем в написании вашей работы!