КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Эксперимент в замкнутом контуре
|
|
|
|
Параметры настройки в соответствии с рекомендациями Циглера-Никольса
Настройки Циглера-Николса используются для P, PI и PI D -регуляторов. Контроллеры с параметрами настройки в соответствии с рекомендациями Циглера-Никольса будут хорошо работать для уменьшения возмущений, но они будут плохо выполнять отслеживание изменений уставки.
Два эксперимента используются для получения технологических параметров, необходимых для определения параметров из таблицы:
- эксперимент в открытом контуре - процесс записи передаточной функции;
- эксперимент в замкнутом контуре – введение замкнутой системы в зону колебаний (за зону устойчивости).
С помощью этой процедуры предполагается, что нет модели процесса. Процедура основана только на измерении. Эксперимент может быть проведен с устойчивыми и неустойчивыми процессами. Система с замкнутым контуром тестируется с P контроллером (интеграл и производная отключаются). Коэффициент усиления P контроллера увеличивают, пока система не достигнет запаса устойчивости (перейдёт в режим колебаний). Когда колебания с постоянной амплитудой и периодом устанавливаются, то можно определить период колебания Тu (критическая величина) и (критический коэффициент усиления контроллера Ku. В ходе эксперимента, при изменении уставки, можно определить статический коэффициент усиления Kp как отношение изменений ответа и уставки в стабильном состоянии.

На основании экспериментально полученных Тu и Ku Циглер и Никольс дали
следующие таблицы параметров контроллера (если критерий - quarter decay ratio):
Получить произведение c = KpKu. Его можно трактовать как максимальный (критический) коэффициент усиления разомкнутой системы и использовать для определения настроечных параметров.
Как правило, рекомендуется использовать настройки параметров Циглера-Никольса:
1. Если c = KpKu <2, то законы управления, которые могут компенсировать транспортные задержки, должны быть использованы.
2. Если c> 20, то лучшие результаты могут быть достигнуты более сложным алгоритмом
управления.
3. Если 1,5 < c <2, то PI D-регулятор может быть использован, если требования к эффективности системы управления не очень строгие. Для достижения хорошей производительности настройки Циглера-Николса должны быть изменены.
4. Если c <1,5, то PI контроллер можно попробовать, если требования к эффективности системы управления не являются очень строгими. Дифференциальный режим не будет значительно использован. Другие структуры также могут быть рекомендованы.
Метод Ziegler-Nichols (Циглера Никольса) - Настройка по методу максимального коэффициента усиления. Этот способ применяется, если допустим колебательный процесс, при котором значения регулируемой величины значительно выходят за пределы задания (на рис. задание - U).
Алгоритм настройки:
1) определяется предельный коэффициент Кмах усиления при котором система переходит в колебательный режим, т.е. без интегральной и дифференциальной части (ТD=0, ТҐ =0). Вначале К=0, затем он увеличивается до тех пор, пока система переходит в колебательный режим. Управление соответствует схеме P -регулятора.
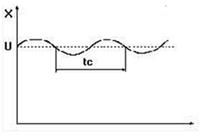
Рис. 5 Настройка по методу максимального коэффициента усиления
2) определяется период колебаний tc (см. рис. 5).
3) вычисляются коэффициенты настройки согласно следующим примерным соотношениям:
для P -регулятора К= 0.5·Kмах
для PD -регулятора К= 0.5·Кмах, TD=0.05·tc
для PI -регулятора К= 0.45·Кмах, TI = 0.8·tс
для PID -регулятора К= 0.6·Кмах, TI = 0.5·tс, TD=0.12·tc.
2. Правила оптимизации согласно Chien, Hrones и Reswick.
Правила оптимизации для систем с компенсацией (без перерегулирования). Пример для PID- контроллера.
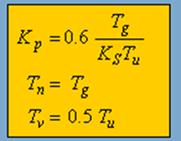
Рис. 6 Правила оптимизации для систем без перерегулирования.
Правила оптимизации для систем с компенсацией (с перерегулированием). Пример для PID- контроллера
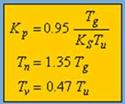
Рис. 7 Правила оптимизации для систем с перерегулированием.
Используя принципы оптимизации согласно Chein, Hrones и Reswick, возможно внести изменения, чтобы:
- установить желательный ответ контура (лучший ответ на изменение setpoint или хороший ответ на возмущения)
- задать желательную тенденцию колебания контура (с/без перерегулирования управляемой переменной).
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 473; Нарушение авторских прав?; Мы поможем в написании вашей работы!