КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Гармонические колебания. Осциллятор
|
|
|
|
Механические колебания
III. Колебания и волны
В природе часто встречается периодическая зависимость от времени различных физических величин. Периодически изменяются со временем температура и освещенность при вращении Земли, периодическое движение совершают маятник часов и колеблющийся грузик на пружине. Периодическим называют процесс, при котором физическая величина принимает одинаковые значения через равные промежутки времени. Такие характерные промежутки времени называют периодом процесса.
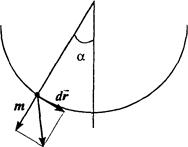 При движении точки с постоянной скоростью по окружности период равен времени полного оборота. При колебаниях периодом является время, в течение которого совершается полное колебание. Вычислим период колебаний математического маятника — материальной точки, характеризуемой массой m и подвешенной на невесомой нити длиной l (рис.).
При движении точки с постоянной скоростью по окружности период равен времени полного оборота. При колебаниях периодом является время, в течение которого совершается полное колебание. Вычислим период колебаний математического маятника — материальной точки, характеризуемой массой m и подвешенной на невесомой нити длиной l (рис.).
При свободном движении маятника в поле силы тяжести остается постоянной полная энергия маятника — сумма кинетической и потенциальной энергий
E = T + U. Следовательно, при бесконечно малом перемещении маятника вдоль траектории изменение полной энергии должно быть равно нулю.
Изменение потенциальной энергии маятника при его перемещении на расстояние dr можно вычислить как работу силы тяжести на пути dr. При этом работу совершает лишь составляющая силы тяжести вдоль направления движения. Составляющая силы тяжести, нормальная к направлению движения, работу не совершает. Таким образом, dU = m × g × sin a dr.
Изменение полной энергии:
Произведя дифференцирование и разделив это уравнение сначала на dt, а затем на величину mv = mdr / dt, получим уравнение движения маятника в виде:
 . (3.1)
. (3.1)
Удобно перейти к переменной a, пользуясь соотношением dr = l d a
 . (3.2)
. (3.2)
Это уравнение довольно сложное, несмотря на свой простой вид. Его можно упростить в случае малых колебаний, когда величина угла колебаний маятника, измеряемая в радианах, мала по сравнению с единицей, a << 1. В этом случае можно заменить sin a ~ a, и уравнение движения принимает вид:
 . (3.3)
. (3.3)
Решением уравнения (3.3) является функция (в чем можно убедиться при прямой подстановке)
a = a0cos(ωt+j0), (3.4)
где a0— максимальный угол отклонения маятника, являющийся амплитудой колебаний; ω— угловая частота колебаний, связанная с периодом колебаний соотношением ω=2p/ T; j0 — начальная фаза колебания — величина, характеризующая угол отклонения маятника (a0 cos j0) в начальный момент его движения (t = 0).
Подставляя выражение (3.4) в уравнение (3.3), найдем, что последнее выполняется при значении угловой частоты:
 , (3.5)
, (3.5)
называемой собственной частотой колебаний маятника. Таким образом, период колебаний маятника:
 . (3.6)
. (3.6)
Обратим внимание на то, что период собственных колебаний не зависит ни от амплитуды колебаний маятника, ни от величины колеблющейся массы.
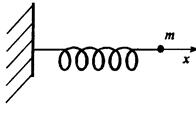 Рассмотрим другой пример малых колебаний вблизи положения равновесия — колебания массы под действием упругой силы (рис.). Если на конце пружины закреплена масса m и пружина характеризуется жесткостью k, то при смещении массы на расстояние x возникает возвращающая упругая сила F = – k×x. Уравнение колебаний массы в этом случае имеет вид:
Рассмотрим другой пример малых колебаний вблизи положения равновесия — колебания массы под действием упругой силы (рис.). Если на конце пружины закреплена масса m и пружина характеризуется жесткостью k, то при смещении массы на расстояние x возникает возвращающая упругая сила F = – k×x. Уравнение колебаний массы в этом случае имеет вид:
 , (3.7)
, (3.7)
аналогичный уравнению (5.3):
 . (3.8)
. (3.8)
Собственной частотой колебаний массы на пружине является величина:
 , (3.9)
, (3.9)
а зависимость смещения массы от времени определяется выражением, аналогичным выражению (3.4):
x (t) = xmcos (ω0 t +a0). (3.10)
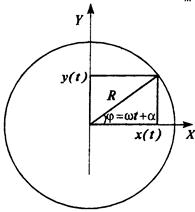 Такими же уравнениями колебательного движения описывается равномерное вращение точки по окружности постоянного радиуса. Колебания при этом испытывают координаты точки x(t) и y(t) (рис.):
Такими же уравнениями колебательного движения описывается равномерное вращение точки по окружности постоянного радиуса. Колебания при этом испытывают координаты точки x(t) и y(t) (рис.):
x (t)= Rcos (ω t +a), (3.11)
y (t) = Rsin (ω t + a) = Rcos (ω t +a–p/2),
где угловая частота ω= v / R определяется постоянной скоростью вращения v. Видно, что координата y определяется той же периодической зависимостью от времени, что и координата x, но только сдвинутой относительно последней на p/2.
Все рассмотренные выше примеры имеют общее свойство — во всех случаях движение может быть описано с помощью всего лишь одной периодически изменяющейся со временем величины. В случае маятника такой величиной является угол отклонения a(t), в случае массы на пружине — величина смещения x (t), в случае движения точки по окружности — одна из координат x (t) или y (t) (другая может быть выражена через первую с помощью уравнения окружности). В механике о таких движениях говорят как о движениях с одной степенью свободы или одномерных движениях. Таким образом, при одномерном периодическом движении координата, соответствующая определенной степени свободы системы, испытывает колебания.
Материальную точку, совершающую колебания, называют осциллятором (от английского слова oscillation — колебание). Колебание, которое происходит по закону cos (ω t) и характеризуется единственной частотой ω, называют гармоническим (поскольку гармоническое звуковое колебание соответствует одному тону).
Таким образом, рассмотренные выше колебания представляют собой частные случаи свободных колебаний гармонического осциллятора:
 , (3.12)
, (3.12)
решение которого будем записывать в виде:
x (t)= Acos (ω0 t +a), (3.13)
здесь A – амплитуда колебаний; ω0 – собственная частота; величина ω0 t +a–фаза колебания.
Удобство использования представления о гармоническом осцилляторе связано с тем, что сложные колебания системы со многими степенями свободы можно представить в виде набора колебаний отдельных гармонических осцилляторов, соответствующих различным степеням свободы.
Определим энергию гармонического осциллятора. Энергия колебания представляет собой полную энергию механического движения, выраженную через частоту и амплитуду колебания. Координата и скорость частицы, совершающей колебания, x (t)= Acos (ω0 t +a), v = – Aω0sin (ω0 t +a), поэтому кинетическая и потенциальная энергия осциллятора примут вид:
 .
.
Выразим постоянную k с помощью соотношения:
 .
.
Полная энергия осциллятора
 . (3.14)
. (3.14)
Таким образом, энергия колебаний пропорциональна квадрату собственной частоты и квадрату амплитуды колебаний. Обратим внимание на сходство этого выражения с энергией вращения материальной точки вокруг некоторой оси: T = J ω2/2, где J – момент инерции точки. Роль момента инерции играет величина mA 2.
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 1010; Нарушение авторских прав?; Мы поможем в написании вашей работы!